基于机械系统动力学自动分析的多喷头3D 打印机运动学研究
2023-09-27 04:51王垚垚臧剑波石禹鹏马苏常
科技创新与应用 2023年27期
王垚垚,臧剑波,石禹鹏,张 虎,马苏常*,刘 缘
(1.无锡职业技术学院机械技术学院,江苏 无锡 214121;2.江苏大学无锡机电学院,江苏 无锡 214121;3.江苏省智能产线技术及装备工程研究中心,江苏 无锡 214121)
3D Systems 公司创始人Hull 首次申请立体光刻技术以来,3D 打印机开始蓬勃发展。近年来,国内外学者对于3D 打印机的机械结构进行不断探索与研究,许多不同类型和结构的打印机逐渐被使用[1-2]。至今已有熔融沉积成型(FDM)、光固化成型(SLA)、三维粉末粘接(3DP)、选择性激光烧结(SLS)和无模铸型制造技术(PCM)等3D 打印机工艺。而Stratasys 公司创始人Crump 研发FDM 工艺的3D 打印机凭借着维护成本低,构造原理较为简单和使用便利等特点被大范围应用[3-5]。其中,Bowyer 改进了串联机构立体式3D 打印机,方向灵活,易于控制但打印精度较低,需要同时控制工作台和打印头才能实现打印。后有学者鉴于串联所产生的一系列问题申请了基于Delta并联机械结构的3D 打印机专利,提高打印精度与质量,但由于结构的局限性,打印回转体类型程序复杂,控制较为困难[6]。机械臂3D 打印技术可以多个自由度快速打印,可见该技术对编程要求极高[7-10]。赵钱孙等[1]和王建等[11]学者将笛卡尔坐标系下的3D 打印机与柱坐标系下的3D 打印机进行机械结构对比,总结出用柱坐标系3D 打印回转体具有打印速度快、精度高、稳定性好和控制简单等优点。
为此本文在柱坐标系的基础上,利用行星轨道[12],设计了一种多喷头3D 打印机。考虑到打印回转体零件的简便与高效,底座采用行星轨道来连接Z 轴运动机构与底座形成柱坐标系的运动结构。剩余结构利用丝杠运动机构进行连接驱动。利用NX 等软件对3D 打印机进行建模,利用ADAMS 对其运动状态进行分析与模拟,通过图表的运动曲线和受力曲线说明此机械结构可以有效提高打印机打印回转体的速度与效率,并证明其结构的可行性与可靠性。
1 柱坐标系多喷头3D 打印机的结构设计
本文设计了一种在柱坐标系下的多喷头3D 打印机,可以多个喷头共同进行打印工作,实现多种分层结构或协同的打印工作。
如图1 所示,底座由支撑架、固定环和打印平台组成。固定环外侧是行星轨道小行星齿轮在Z轴运动机构下方固定。2 个Z轴运动机构上面承接料架,下面通过小行星齿轮与底座的行星齿轮形成回转结构,为旋转副。Z轴运动结构为运动副由步进电机驱动在Z轴上下运动。横向架梁机构夹在Z轴运动中间为运动副,负责挤出机的横向运动,利用丝杠运动配合步进电机进行驱动。

图1 柱坐式3D 打印机
此结构大部分打印机的空间直角坐标系转化为柱面坐标系(图2)。在此坐标系下圆形曲线和矩阵变换易于表达。
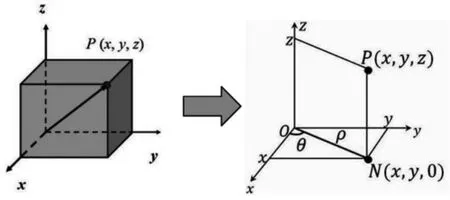
图2 空间直角坐标系转换为柱坐标系
设P(x,y,z)为空间内一点,并设点P在xOy面上的投影N的极坐标为(ρ,θ),则称(ρ,θ,z)为P的柱面坐标。并规定范围是:0≤ρ<+∞,0≤θ≤2π,-∞ 本文设计的多喷头3D 打印机的各部件如图3 所示,其打印机底座采用圆形底座。中间的圆台为工作台,最外面的齿轮组成行星轨道为柱坐标平面内的轨道结构,最下面为加固底座。 外层采用行星轨道具有高载荷、大传动比和扭矩传递性好等特点适应了本3D 打印机的柱坐标平面多喷头转动的设计要求[13-14]。此轨道可以满足单喷头或者多喷头同时在柱坐标系下进行运作。如果在主齿轮不变的情况下,选择不同的行星齿轮,可以使传动比发生改变。 图3 部件示意图 横向架梁伸缩运动机构采用步进电机加上丝杠的驱动模块,可以有效保证此方向的打印精度与速度。在运动的过程中,这个结构中的丝杠受力最大,在下面基于ADAMS 的力学仿真中会有分析。Z轴依旧采用步进电机和丝杠的驱动模块。两边挡板为承重板,并且可以有效地与上面料架机构连接。上方的料盘可以放置打印耗材,下方的支架则是起到支撑作用,并连接到Z轴运动机构上。 同面打印可以在相同的平面上打印,互相不干扰,可以增加打印效率。喷头轨迹的计算是基于空间柱坐标系,因此其打印曲线的速率与精度比普通结构的打印机都有明显改善,该结构的打印机十分适合制作轴类等回转类零件。本实例2 个柱座同时打印阿基米德螺线。打印过程如图4(a)所示。 图4 工作示意图 图4(b)为理论打印曲线,通过对驱动函数的设置,可以打印出同一个平面内的曲线。通过曲线之间的叠加组合,打印回转体零件的效率会大大增加。 在打印过程中对2 个喷头的位移和速度曲线进行比较分析,运动过程平滑无突变,由曲线可以看出在0~10 s的时候位移比较大,这是因为2 个喷头要在工作台上的参考点处,2 个喷头在空间上的位置不相同,所以在回参考点的时候位移不相同。在20 s 的时候位移和速度曲线呈简谐运动曲线。2 个喷头在同一工作面的时候,2 个柱座下面的行星齿轮电机开始运动,围绕工作台作匀速运动,所以得到的曲线呈简谐运动曲线。 在悬臂梁上由丝杠固定的挤出机,在运动过程中可能会出现振动现象,所以在丝杠和挤出机的连接点处测量丝杠上受到力的状况。但由于造成的震动较小,整体受力曲线平滑无突变,受到的力在丝杠强度允许范围内,满足设计要求。 在实际生产中,为加快生产效率。打印机的两个喷头可以相互协助,喷头A 打印A 层,喷头B 打印B 层,通过专用的切片软件,可以将物体模型的界面轮廓和路径轨迹输入到控制系统里,通过系统分析将模型的数据分别输入到2 个喷头,喷头A 先打印一部分,喷头B 打印在喷头A 的路径上,实现逐层堆积。最终实现模型零件的打印工作。这样就实现了双层同时打印的动作。提高了打印的工作效率和工作速度。理论上是双倍效率,实际效率在1.5~1.8 倍,因为喷头B 跟随喷头A 打印,有一定的滞后性。可以根据太阳轮的尺寸,增加喷头的数量,实现2 个以上的喷头打印,可极大限度地提高打印效率。 在ADAMS 中设置运动副的驱动函数,运动轨迹如图5 所示。2 个喷头在同一运动轨迹上后,行星电机绕工作台匀速运动,设置好打印件的层高等参数,纵向电机就会旋转1 个步距角,逐层向上完成打印工作。 图5 协同打印 本文所设计的3D 打印机,基于柱坐标系设计。主要采取外啮合行星齿轮的方法,使2 个柱座在工作台上实现打印工作。在柱座上采用悬臂梁结构,实现喷头在工作台上的打印工作。 本文主要通过ADAMS 运动仿真针对3D 打印机在工作过程中的3 种情况做了运动学仿真,分析运动工作的可行性,然后对2 个喷头的位移、速度曲线、挤出机和丝杠连接点的受力情况进行分析。3 种工作过程的仿真结果都满足打印机的要求,并且工作过程中丝杠所受到的力均在强度校核所预设的力之内,所以该3D 打印机可以顺利运行。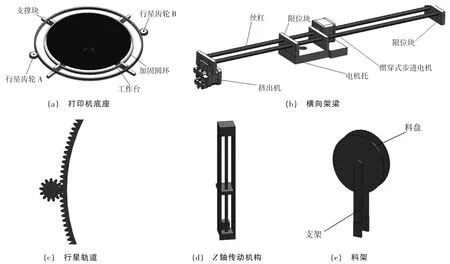
2 运动学仿真
2.1 同面打印

2.2 协同打印

3 结束语
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
制造技术与机床(2019年11期)2019-12-04
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
装备制造技术(2018年10期)2018-12-24
发明与创新(2016年34期)2016-08-22
中国塑料(2016年7期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
深圳职业技术学院学报(2015年5期)2015-11-30
发明与创新(2015年30期)2015-02-27
发明与创新(2015年26期)2015-02-27