GPS测量技术在短基线控制网布设中的应用
2023-09-25 00:44闫保攀
延安职业技术学院学报 2023年4期
闫保攀
(中铁十八局集团第二工程有限公司,河北 唐山 063000)
引言
短基线是一种常见的基于基线的测量定位技术,通过布设控制网获取目标点的平面坐标,结合相位模糊计算进行坐标转换,实现高效率的测量和定位。随着我国桥梁建设的不断发展,针对隧道测量精度的要求也逐渐上升,由于在桥梁隧道的施工环境复杂,导致隧道短基线的图形强度较弱,随着隧道掘进的距离越长,洞内定向的精度受环境影响越大,精度难以保证。而在短基线测量中,控制网的布设决定了短基线测量的精度,但目前所采用集中控制网布设方式在实际应用中存在一定不足。文献提出的基于GNSS 的控制网布设,通过布置GNSS 变形监测网分析短基线测量数据间的噪声特性完成数据计算,测量精度低,适应能力差[1]。文献提出的基于IGS 站的控制网布设属于大型线状网布设,需要选取大量的控制点进行布设,成本较高,且以IGS 站作为测量数据交换站实现目标和定位系统的数据传输,时效性较差,不能满足实时定位需求[2]。文献提出的基于混合双差相对定位模型的控制网布设利用控制点间的通视性,分析相邻两控制点测量数据的相位差进行定位,但在实际应用中,常由于信号遮挡导致无法及时采集数据,且稳定性较差[3]。基于以上分析,本文深入研究了GPS 测量技术在短基线控制网布设中的应用,提出了一种基于GPS 测量技术的短基线控制网布设,旨在进一步提升短基线测量和定位的精度,确保隧道建设的准确贯通,加速我国的桥梁隧道工程建设[4]。
1 短基线控制网的布设
1.1 控制网的网型设计
为了提高GPS 测量技术在短基线控制网页布设中的应用效果,首先完成短基线的网络布局设置,为GPS 测量技术的应用构建应用环境[5]。根据GPS测量技术的应用规范,本文在短基线控制网中主要设置两个GPS控制点,一个是作为首次推荐的GPS 技术引用点,一个是辅助点,防止出现引用点故障,导致测量技术引入失败。在每个控制点内需要设置至少10个引入控制点,并且每两个控制点之间需要两两连通,根据GPS 的规范,控制点之间的距离控制在900 米~1100 米范围内,保证控制点之间构成一个环路,实现有效测量[6]。
除此之外,控制网布置图结构要以实际情况为准则,通常选择两个公共边,从而将两个四边形重合,形成一个闭合的短基线控制网布设图[7],控制网布置示意图如下图1所示。在构建短基线控制网过程中也要考虑到观测的影响,如果观测效果不佳,那么测量技术所测量的数据也不具有被发现的条件[8]。对于观测效果,本文主要考虑布网观测的通视方向,同时配置精度为5mm+1ppm,4600L型号的多频GPS 接收机共同完成观测。观测时间以实际观测到准确的数据为原则。
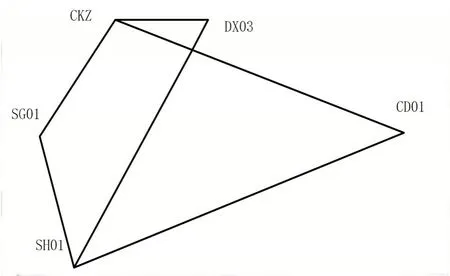
图1 控制网网形图
1.2 控制点的选点
短基线控制网内设置了多个控制点,每个控制点所承接的作用是不同的,因此每个控制点位置的选取和定位都是具有一定的规则,具体控制点的选取过程如下所示:
首先,观测点应该设置在四周开阔的位置,在5000米范围内不能存在过高的建筑物,遮挡观测点的观测。
其次,观测点的角度规定为仰角15°,在其原本的基础上扩大观测点的观测范围。由于观测点内设置的部分仪器具有辐射性[9],因此需将观测点设置在郊区,防止辐射对人体或动植物造成侵害,确定好观测点后,在观测点上方安装接收天线。桥梁隧道洞内的测量定位原理如图2所示。
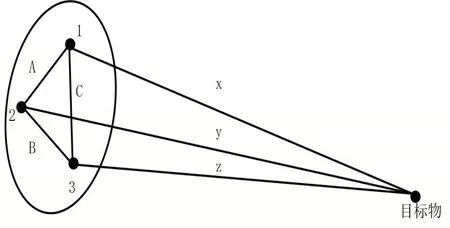
图2 桥梁隧道洞内的测量定位原理
然后,确定控制点。根据在短基线控制网内布置的观测点位置,要求每个观测点周围需要存在5个控制点,每个控制点不能与变压器重合,或者距离过近,避免干扰GPS信号的接受与发送[10]。短基线测量示意图如图3所示。
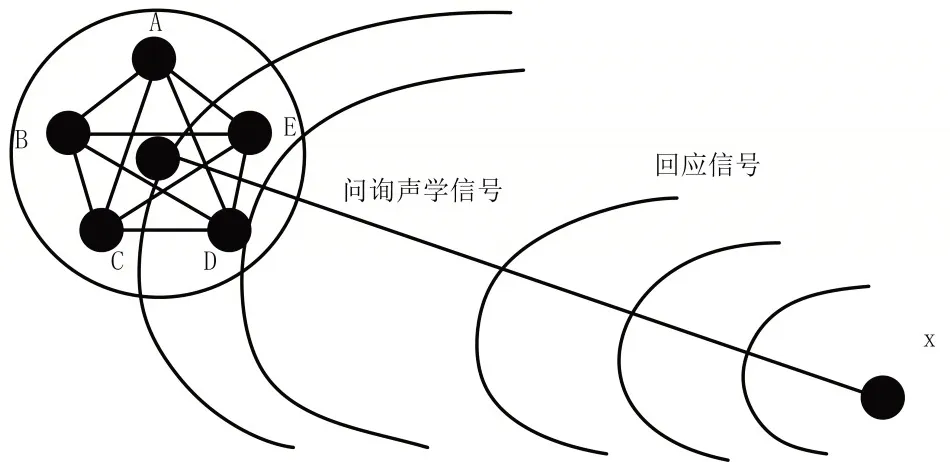
图3 短基线测量示意图
最后,根据所布置的控制点和观测点,以范围最小化为原则,完成短基线控制网最外层的确定。桥梁隧道洞内短基线测量网图如图4所示。
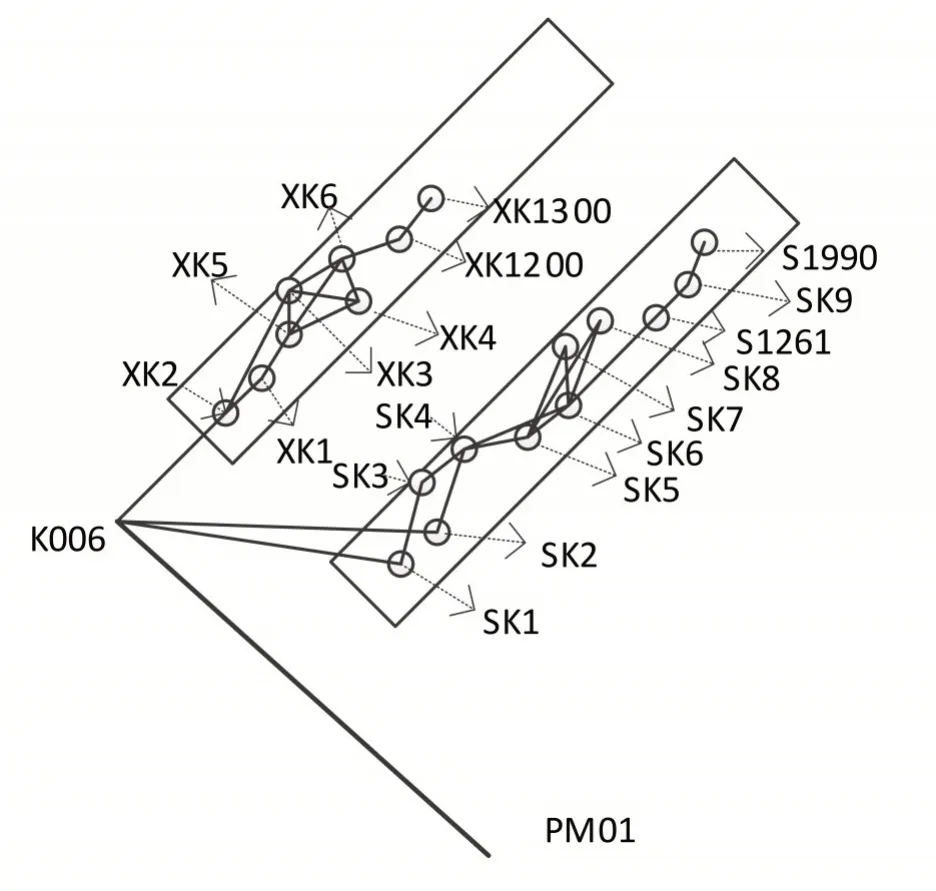
图4 桥梁隧道洞内短基线测量网图
2 基于GPS测量技术的桥梁隧道短基线测量
2.1 测量数据预处理
为了降低针对短基线控制网内测量数据的计算复杂度,首先需要对测量数据进行预处理[11],初次筛选出不具有计算意义的测量数据,保证测量数据解密计算数据的有效性[12],提升数据计算的效率,保证计算精度
基线预处理是对测量数据的基线双差值完成筛选处理。具体基线测量数据的筛选原则如下所示:
(1)每个控制点的处理数据参考方差的值应该无限趋近于1;
(2)测量数据基线的同步闭合差不能大于1厘米;
(3)数据的环长和基线条数的比例应该在1∶562。
(4)数据在平差约束计算后,基线在DM205~DM151范围内。
基线数据必须满足以上两条或者两条以上的原则,若达不到以上要求,需进行异步环检测[13],异步环检测的对象是基线任意相连的三条边,检测原则和同步环检测流程相同[14]。若基线数据不满足同步环检测和异步环检测的检测标准,视为无意义的测量数据,需要被删除。
2.2 测量数据的解算
测量数据解算的目的是将观测的数据,在预处理的基础上进行进一步扩展,提高测量的精度[15]。本文应用GPS 测量技术时,采用静态测量,一方面可以提高测量的任务量,另一方面可以保证短基线控制网内每个控制点测量数据存在的误差是独立误差[16]。基于GPS测量技术的静态测量过程如图5所示。
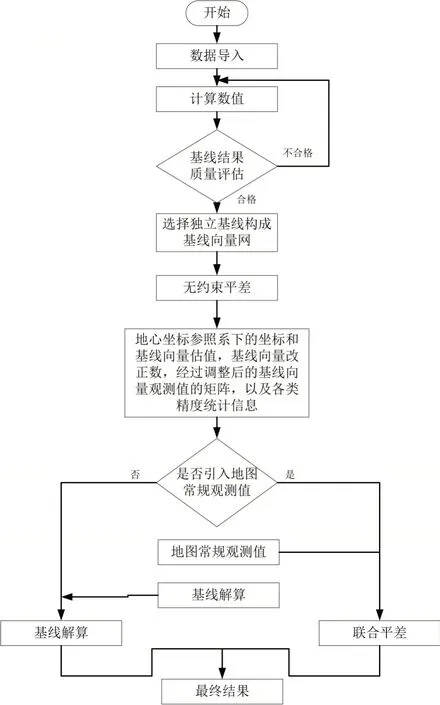
图5 基于GPS测量技术的静态测量过程
针对短基线控制网内测量提交数据的解算,主要涉及基线向量的方差、协方差、基准方程、观测权重矩阵以及误差仿真,解算原理是利用最小二乘法公式,将各个矩阵进行关联,完成控制点测量数据的解算,解算公式如:①②③
其中,W表示耽误权重;l表示测试距离。
耽误权重W的计算公式如下:
其中,B表示测试数据关系序列;T表示时间序列。
通常情况下,控制点的数据利用公式可以直接完成解密操作,但是由于桥梁隧道测量中,全站仪中转点的测量数据是在多个控制点测量数据的基础上进行测量的,所以针对全站仪数据的测量存在复杂性和困难性[17]。经过对以往的测量数据分析,全站仪中转战越少的站点测量的数据误差越少,为了保证全站仪中转点数据解密的精度,此仪器测量数据的解密需要进行双重解密,在解密公式计算的基础上,还需要特殊引入线性误差传播定量,即在对全站仪中转站进行数据测量时,将全站仪测量的辅助控制点设置为1 个,其他控制点由多个导线网结构代替,降低数据解密的难度。[18]
2.3 解算结果的校准
短基线控制网内测量数据解密操作完成后,为了保证解密数据的精度,本文在传统的测量流程中增加了解密结构校准流程。解密结构校准流程分为两部分,一部分是系统的校准,另一部分是对解密结构坐标的校准,其中,系统校准可以影响坐标的校准结果,但是坐标的校准不能影响系统校准的结果[19]。
系统校准的核心是控制短基线控制网内各个解密数据对应的控制点轴线方向和向角方向的角度是否符合规定要求,如果符合要求,那么测量数据的解密结果是正确的,如果所成角度不在规定角度范围内,那么测量数据的解密结果需要进行系统的校准。因为短基线控制网内控制点轴线方向是固定的,所以在进行系统校验时,通过更改向角的角度完成系统的校验。二级平面控制点角度校核表如表1所示。
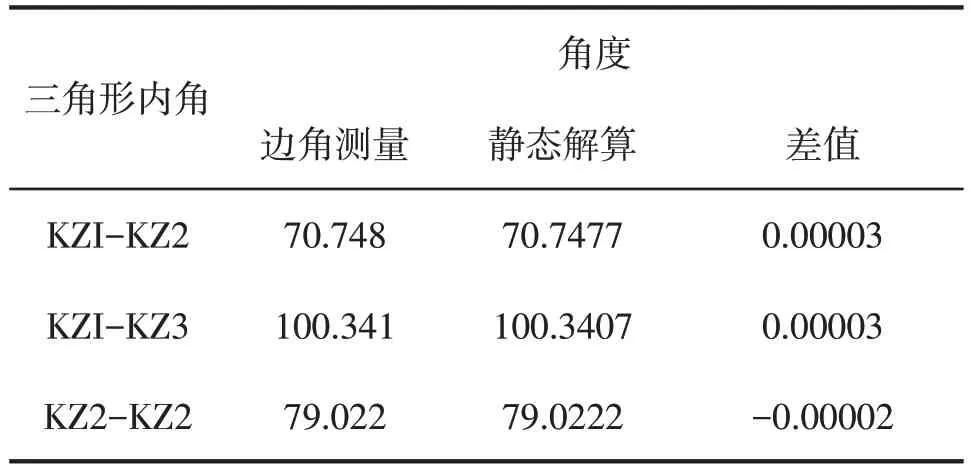
表1 二级平面控制点角度校核表
在执行系统校验的基础上解密数据坐标的校验也可以说是对系统校验的检测,其校验流程与系统校验是绑定的。坐标校验工作的核心是通过将解密数据的结果化为坐标形式与原先控制点的坐标进行对比,如果解密数据坐标在控制点有效坐标范围内,则也可以证明解密数据的正确性。相反如果解密数据坐标不在控制点范围内,那么解密数据存在误差,需要进行重新解密。重新解密后,重复系统校验和坐标校验流程,直到校验成功。
结束语
桥梁隧道建设是我国交通建设的重点内容,在国家经济发展中发挥着重要的先行作用。随着GPS 技术和产品的不断发展,GPS 在桥梁测量以及隧道定位中的应用也逐渐普及化,本文深入研究了GPS测量技术在短基线控制网布设中的具体应用,进行了科学且合理的短基线控制网布设,进一步提升短基线测量的定位精度,从整体评价结果来看,本文布设的短基线控制网能够满足隧道工程对时间效率和结果精度的需求,可直接应用于工程实施,满足不同工程对隧道洞内定位精度的需求。
猜你喜欢
阅读(快乐英语高年级)(2021年4期)2021-07-11
智能城市(2021年3期)2021-04-12
少先队活动(2020年9期)2020-12-17
阅读(快乐英语高年级)(2020年10期)2020-01-08
绿色科技(2019年12期)2019-07-15
中国铸造装备与技术(2017年6期)2018-01-22
水利科技与经济(2016年10期)2016-04-26
山东建筑大学学报(2015年4期)2015-05-11
电测与仪表(2015年1期)2015-04-09
电测与仪表(2015年19期)2015-04-09