基于改进YOLOv6 电动单车违法停放的检测方法研究
2023-09-21 15:49汪燕超胡旭晓
智能计算机与应用 2023年9期
汪燕超, 胡旭晓
(浙江理工大学机械工程学院, 杭州 310018)
0 引 言
电动单车是生活中常见的交通工具,据相关资料显示,中国居民电动单车拥有数已超过3 亿,而大量电动单车随意停放的现象对公众的人身和财产安全造成了巨大威胁[1]。
以往对于电动单车违法停放的监测主要依靠在场所附近安装监控并拍摄照片,而后交给监控中心的工作人员进行监控和预警。 这种方法消耗了大量的人力和物力,对于电动单车违法停放的识别准确率也不高。 近年来人工智能技术快速发展,有学者提出了基于深度学习的目标检测模型,深度学习模型主要分为两大类:一类是基于候选区域的二阶段目标检测模型,另一类是基于回归的一阶段目标检测模型,两者分别依据候选框卷积和模型回归对目标进行检测,代表算法有Faster -RCNN(Faster Region with CNN feature)、SSD(Single Shot MultiBox Detector)和YOLO 系列等,但这些算法常常存在对小目标漏检和误检等问题。
针对传统检测方法的不足,本文提出了改进的YOLOv6 模型,在YOLOv6 模型检测部分嵌入CBAM(Convolutional Block Attention Module)卷积注意力模块,并引入Ghost 幻影卷积模块,以提高模型的精确度和检测速度。 改变外接摄像头所拍摄电动单车停放图片的亮度、遮挡范围和目标个数等属性制作相应数据集,据此评估改进后的模型的鲁棒性、识别速度和精度,进一步提升改进后模型的性能。
1 YOLOv6 模型简介
YOLO 系列模型采用直接回归的方法,与传统的目标检测模型相比,YOLO 系列模型计算效率高,能够方便地进行端到端的训练,因此能快速地检测出目标,在许多实际的应用场景都取得了较好的效果。
YOLOv6 模型的网络结构主要由输入端(input)、骨干网络(backbone)、颈部(neck)以及输出端(output)构成。 YOLOv6 在输入端采用了HSV(Hue,Saturation,Value)数据增强方式,将输入端所输入的RGB 图片拆分成3 个通道即色度,饱和度和明度,在此基础上设置Hgain 色度增值、Sgain 饱和度增值和Vgain 明度增值系数,将3 个通道各自的增值系数与输入端产生的范围在-1 ~1 的3 个随机系数相乘,加一可求得随机的增益系数,借此可重新获得映射增强后的RGB 图片,不仅可以减少原始图像中的噪声干扰,还避免了在图像增强的过程中造成失真。
在颈部部分,YOLOv6 模型引入了重参数化的视觉几何组结构,提出了效率更高的高效重参数化方法EffcientRep,将颈部中步长为2 的卷积层替换为了步长为2 的重参数化卷积层,降低了模型对内存的占用率,并且将信号处理块改为重参数化块结构,加快了模型的推理速度[2]。
YOLOv6 模型在颈部部分的特征融合上同样引入了重参数化的结构,将像素聚合网络与重参数化块两者结合,降低了模型在硬件上的延时。 而在输出端部分对检测头进行了解耦, 基于Hybrid Channels 的策略重新设计出了一个更高效的解耦头结构,避免了YOLOvx 在解耦头中新增两个额外的3×3 的卷积,降低了网络运算的复杂度,此外YOLOv6 模型还分开了边框回归与类别分类的过程,提高了模型的性能,且由于重新定义了算法的距离损失,导致YOLOv6 模型加快了收敛的速度并降低了检测头的复杂度[3]。
YOLOv6 模型网络结构如图1 所示。
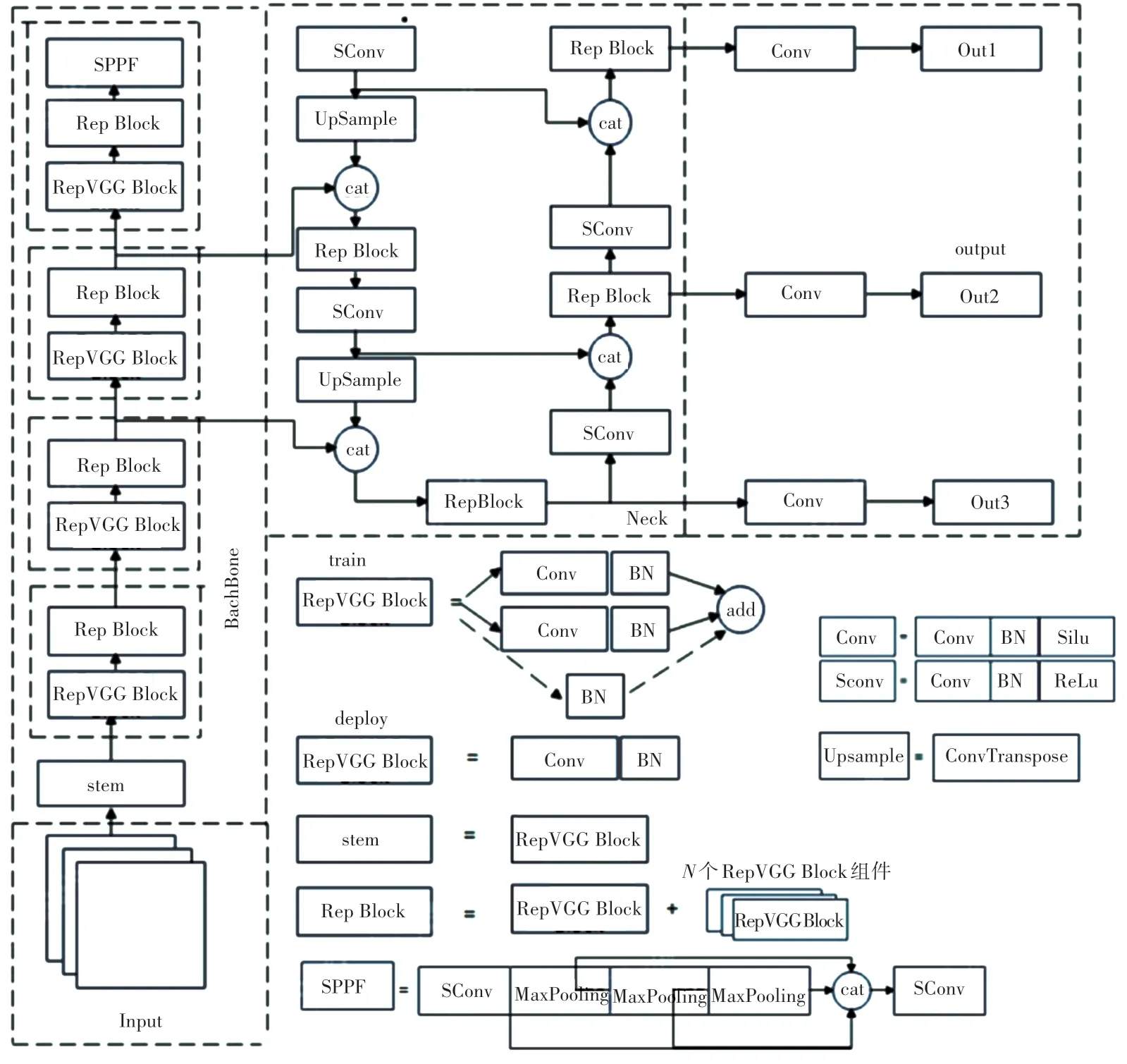
图1 YOLOv6 网络结构图Fig. 1 YOLOv6 network structure
2 改进的YOLOv6 模型
(1) 在neck 结构中将普通卷积替换为轻量级的Ghost 幻影卷积模块,如图2 和图3 所示;
图2 普通卷积Fig. 2 Ordinary convolution
传统的卷积运算为了得到较为全面信息,采用了较大的卷积核和通道数会产生较多相似的特征图,假设输入特征图的大小为w*h*c,经过n个卷积核,每个卷积核大小为k*k*1,根据卷积运算规则可知总体计算量为w*h*c*k*k*n,其中h和w是输入特征图的长度和宽度,c是输入特征图通道数,k是采用卷积核的长度和宽度,n指卷积的次数。
普通卷积过程所产生相似的特征图,可以直接通过线性变换得到,而不需要进行复杂的非线性变换得到。 于是引入了Ghost 模块,Ghost 模块将传统的卷积模块分成了两个部分,第一步仍然进行普通卷积,但减少特征图的输出数量,第二步在此基础上进行线性变换生成相似特征图,最终所得特征图数量与传统卷积运算一致, 其总体计算量为n/s*h*w*k*k*c+(s-1)*n/s*h*w*d*d,其中s和d分别是线性变换的次数以及线性变换过程中卷积核的大小。
由上述结论可得出传统卷积运算核与Ghost 卷积运算所耗时间比值,式(1):
由于s是个常量,上述公式比值约为s即线性变换的次数,故可知Ghost 卷积运算相比与传统卷积运算减少了网络模型计算量,降低了所耗时间成本。
(2)卷积注意力模块CBAM
CBAM 模块是一种结合了空间和通道的注意力机制模块,常在深度学习网络结构中被用于提升网络特征提取的性能,与通道注意力模块相比增加了空间的注意力模块,因此能够取得更好的目标识别效果,因此能够取得更好的目标识别效果。 CBAM模块具体的网络结构如图4 所示。

图4 CBAM 模块网络结构Fig. 4 Network structure of CBAM module
由图4 可知,CBAM 模块主要由通道注意力模块和空间注意力模块所组成,CBAM 模块中的通道注意力模块与传统通道注意力模块相比采取了全局平均池化和全局最大池化,两种不同的池化意味着提取的高层次特征更加丰富,并且平均池化和最大池化共同与多层共享感知机连接以减少学习参数。通道注意力模块网络结构如图5 所示。
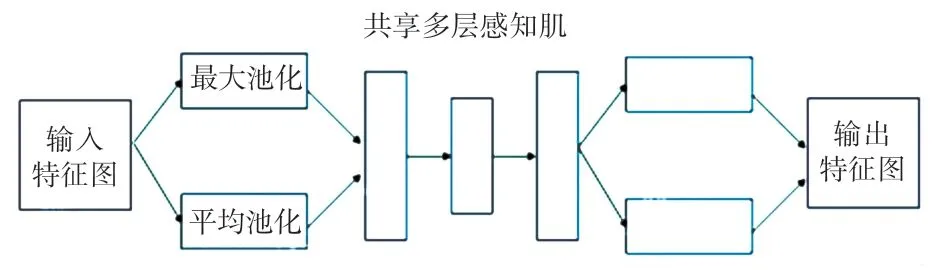
图5 通道注意力模块网络结构Fig. 5 Channel attention module network structure
在通道注意力模块中的多层共享感知机是一种3 层结构的人工神经网络,包括输入层,输出层和隐含层3 个部分,其中隐含层可以由多个隐层所构成,并且多层共享感知机中层与层是全连接的,w1,w2,w3则是权重,&为偏置,X为输入参数,可知隐藏层输出为w1X+&,其结构如图6 所示。
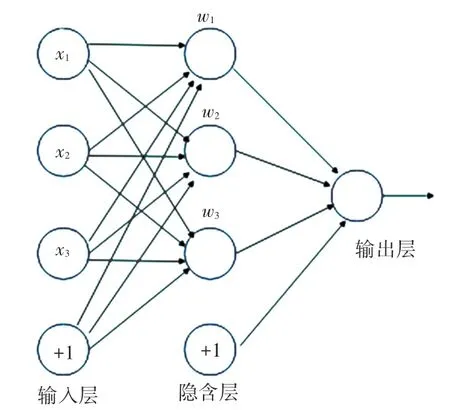
图6 多层共享感知机结构图Fig. 6 Structure of multi-layer shared perceptron
空间注意力模块同样采用了最大池化和平均池化,不同的是在通道这个维度上进行的操作,即把所有的输入通道池化成2 个实数,接着通过一个7*7的卷积核得到空间注意力矩阵,在此矩阵基础上与输入特征图相计算可得最终的输出特征图,其结构如图7 所示。
本文采用的CBAM 注意力模块尽可能提取所识别目标的特征信息,忽略目标背景等非必要信息,从而提升改进后的网络模型检测精度。
3 数据集制作及实验过程
本文对于电动单车违法停放的现象标注了在电梯和消防通道两个场景下的数据,并结合开源的coco 数据制作了数据集,但由于数据格式不匹配或图像文件损坏等问题需要筛掉不符合要求的图像文件,采用HSV 数据增强方法对所得数据集进行数据预处理,增强电动单车图像的色彩深度和对比度,经处理后得到符合条件的图像数据共计1 030 幅,并将所得图像数据使用LabelImg 工具标注。
将标注好的数据集按8:2 的比例划分为训练集和测试集,得到训练集图片共计824 幅,测试集图片206 幅。
本次实验在Ubuntu 22.04 操作系统上完成,硬件配置采用NVIDIA GFore GTX1660Ti 显卡和Intel i5-7300H 处理器。 网络模型采用pytorch1.10.2 搭建,在训练过程中,设置初始学习率为0.01,训练周期上限设置为500,批次大小设置为32,即每次参与训练的样本数量。
4 评价标准和实验结果
查准率(Precision) 指正确预测为正的占全部预测为正的比例,式(2):
其中,TP指的是将正例判定为正例,即将图中消防通道和电梯等场所背景中的电动单车检测为电动单车的样本,而FP指的是将反例判定为正例,即将图中消防通道和电梯等场所背景检测为电动单车的样本。
查全率(Recall) 指即正确预测为正的占全部实际为正的比例,式(3):
其中,FN指的是将正例判定为反例,即将图中消防通道和电梯等场所背景中的电动单车检测为背景。
综合查准率和查全率可得到P-R曲线,P-R曲线代表了网络模型的预测效果,P-R曲线所围成的面积大小被称为AP平均精度,而针对检测的每个目标都有单个的平均精度AP值,由此可引入全类平均准确率mAP,即对所有的目标类别的AP值再次求和取平均,式(4) :
此外,工程的实时性也十分重要,因此FPS(Frames Per Second)帧率也是衡量目标检测算法性能的重要指标,代表了网络模型每秒中图像的检测速度。
本文将改进后的网络模型与原YOLOv6 模型在平均准确率、精确率和帧率这3 个方面进行比较,实验结果如图8,图9 和表1 所示,改进后的网络模型准确率提升了1.5 个百分点。
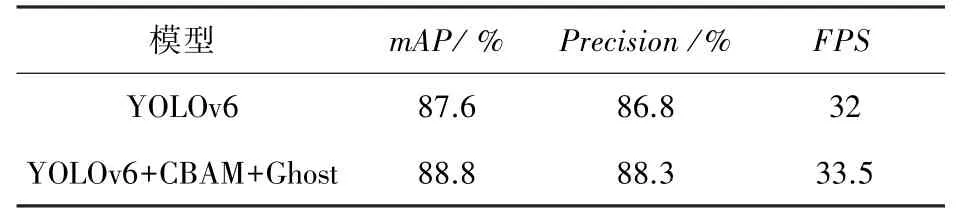
表1 实验结果Tab. 1 Experimental results
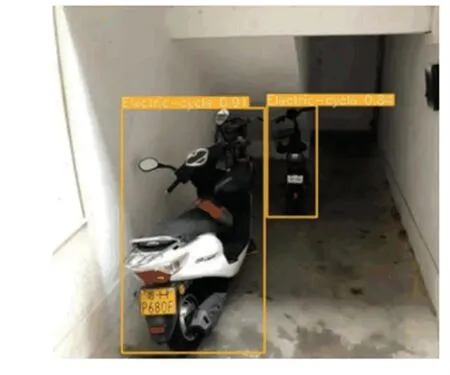
图9 改进后的YOLOv6 模型检测结果Fig. 9 Improved YOLOv6 model detection results
5 结束语
本文提出了一种改进的YOLOv6 模型用于电动单车违法停放检测,在YOLOv6 模型的neck 部分加入Ghost 卷积模块,并在输入端部分嵌入CBAM 卷积注意力模块。 相比与传统的YOLOv6 模型,目标的检测精度和推理速度得到一定的提升,具有一定的实际应用价值。
猜你喜欢
科学技术与工程(2023年3期)2023-03-15
意林彩版(2022年1期)2022-05-03
软件导刊(2022年3期)2022-03-25
新一代信息技术(2021年22期)2021-12-29
读友·少年文学(清雅版)(2020年1期)2020-05-20
计算机技术与发展(2019年1期)2019-01-21
领导决策信息(2017年9期)2017-05-04
岷峨诗稿(2017年4期)2017-04-20
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
管理现代化(2016年3期)2016-02-06