基于改进Faster-R-CNN 塔式起重机驾驶人员行为监测研究
2023-09-21 15:49李亚伟陈文铿林鸿强张旭生陈子健林进浔陈国栋
智能计算机与应用 2023年9期
李亚伟, 陈文铿, 林鸿强, 张旭生, 陈子健, 林进浔, 陈国栋
(1 福州大学物理与信息工程学院, 福州 350108; 2 福建数博讯信息科技有限公司, 福州 350002)
0 引 言
塔式起重机(又名“塔吊”),是建筑工地上常用的起重设备,纵观国内塔吊租赁行业,每年塔吊安全事故都有发生。 据有关部门统计,目前国内塔吊重大安全事故率约为0.3%,多数情况都是由驾驶人员的违规操作造成的,且一旦发生事故,驾驶人员的生还率极低。
目前,对于驾驶人员的行为规范监测研究中,基于面部识别的驾驶员疲劳危险驾驶检测系统[1-2]针对眨眼和打哈欠时的人脸特征点进行建模、提取和训练,通过疲劳阈值来判断是否疲劳驾驶,但疲劳阈值的设定存在因人而异,泛化能力不够的问题;基于双向长短记忆网络[3-4]的异常驾驶行为的检测方法,通过构建前向LSTM(Long Short-Term Memory)和后向LSTM 双向网络来记忆过去时刻的车辆运动状态(横纵向加速度和转向角等),再将结果输入到全连接层中回归分类异常驾驶行为(急刹车和急拐弯等),但此方法并不适用于塔吊驾驶人员检测;多任务级联卷积神经网络MTCNN[5]结合人脸识别方法,同时对手机和烟头进行检测,通过级联结构达到较高的人脸检测对齐速度,构建其关联性,来判断驾驶人员是否存在违规行为,但若驾驶人员使用手机时离脸部较远会出现漏判情况;双线性注意力网络[6]在RNN 的基础上引入了长短时记忆单元,拥有了记忆功能,解决了RNN 的梯度消失问题,构建了多重损失网络的结构,能对多种分心行为进行分类,但每个LSTM 的神经元都连接多个全连接层,对设备的算力、内存要求高,而且耗时,较难在移动端实施实时性部署;彭豪等人[7]提出基于改进的Faster R-CNN 的FRC-Tiny 目标检测模型,并与郑福建等人[8]提出基于剪枝的Cut-YOLOv3 算法模型,通过融合算法,在原生算法性能上得到进一步提高。
针对上述研究存在的问题,本文在此基础上提出了结合手部检测的塔吊驾驶人员行为规范监测方法,在Faster R-CNN[9-10]网络的基础上,融合剪枝、注意力机制等算法,对模型的效率和精度进行了优化,通过手部和被测物体的IOU对比,更准确判断驾驶人员的违规行为,具备效率快、精度高和鲁棒性强等特点, 并与FRC - Tiny 检测模型和Cut -YOLOv3[11]模型进行对比。 实验结果表明,该模型在行为监测上表现更优。
1 CF-R-CNN 网络模型
1.1 整体网络结构
Faster R-CNN 是两阶段的检测算法,引入Anchor 先验框,利用RPN 快速生成候选框,预测每一个Anchor 属于前景与背景的概率,生成区域建议框并计算真实物体相对于Anchor 的偏移量。 通过RoI Pooling 层后,特征信息池化到统一的维度上,再输入到全连接层进行分类和回归,兼顾了目标检测的精度和效率。 本文在此网络的基础上,融入了剪枝处理和通道注意力模块,在精度略有下降的同时,提高了模型的效率。 基于改进的Faster R-CNN 主干网络如图1 所示。 在此将网络模型分为两条支路,输入的数据分别经过两个ResNet101 模块。 第一部分是ResNet101-FPN 层-RPN 层,利用FPN 层的双向特征金字塔来提取全局特征;第二部分是ResNet101 网络+注意力机制,用于生成局部特征,结合第一部分的全局特征进行上下文信息融合,通过FC 层进行softmax 回归。
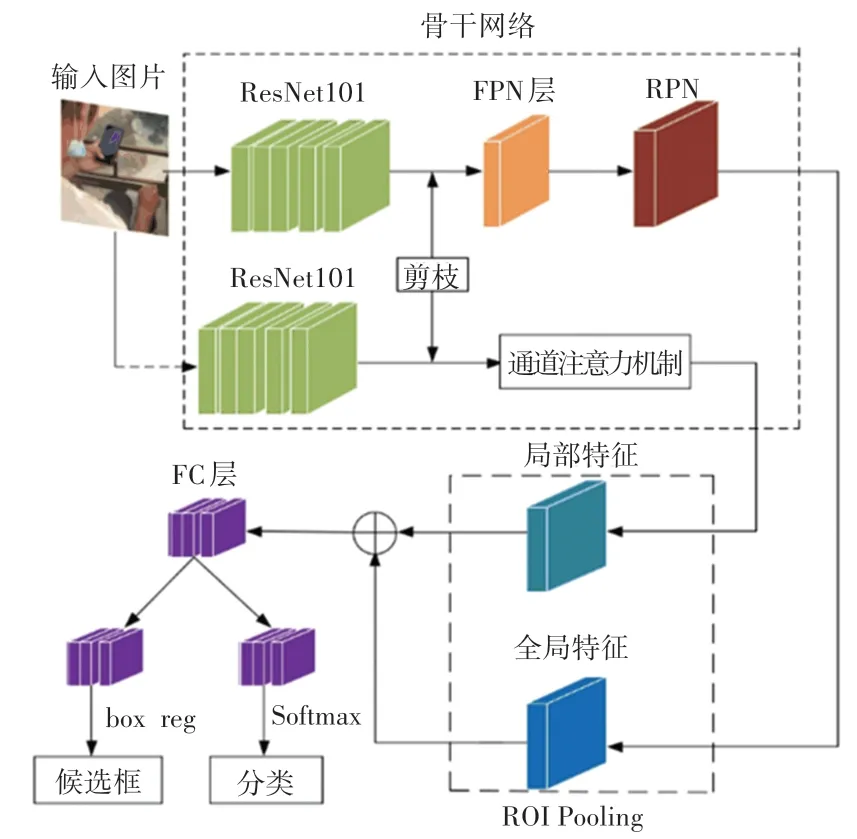
图1 主干网络CF-R-CNN 模型图Fig. 1 Backbone network model diagram of CF-R-CNN
1.2 模型剪枝处理
由于移动端的算力水平普遍偏低,若在移动端部署,需对网络进行轻量化处理,故对Faster RCNN 网络进行剪枝处理。 在Faster R-CNN 模型中,网络计算量集中在ResNet101 模块上。 文献[12-13]中提出的ResNet101 网络,在目标检测中表现优异。 其内部的残差块使用了跳接方式,缓解了神经网络深度加深时带来的梯度消失问题,保留ResNet101 的残差跳接部分,对残差块的层数进行优化。 但ResNet101 网络在训练数据时,会将数据扩展到多维度上,有些维度上的权值较小,对特征不敏感,可考虑将其剪除达到网络“瘦身”的目的。 具体的处理过程如图2 所示。 在ResNet101 中的第二和第三个大残差块中,将其中的小残差块进行整合。如:输入56*56*256 维度的特征图,经过三层卷积之后又恢复成56*56*256 的特征图,再与卷积前的特征图跳接,经过激活层后,再通过三层卷积层最后输出28*28*512 的特征图。 针对这些反复提取特征的残差块,本文先将输入信息输入给卷积核大小为3×3 的卷积层,而不是原网络的1×1 卷积核,增大了感受野,然后再把特征信息输入到1×1 的卷积核中,对输入进行降维,再重复一次这样的操作,只是把第三层的步长S设为2,进行上采样,最后将输入与输出进行融合后送入激活函数。 跳接部分不采用输入直接与输出跳接,而是将输入进行上采样后,再与输出进行跳接,从而减少网络参数的计算量。
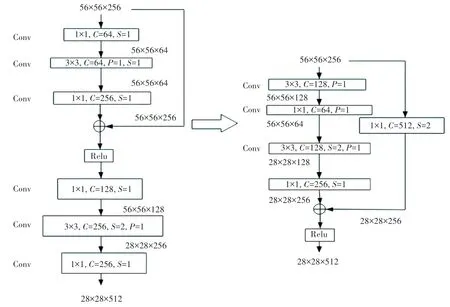
图2 ResNet 剪枝流程Fig. 2 Pruning process of ResNet
1.3 通道注意力机制
在获取被处理的图像时,摄像头的拍摄角度和人体遮挡等意外情况,使得检测准确率不理想[13-14]。 因此在网络层中引入了注意力机制,加强对细节信息的感知能力。 输入信息在被喂给网络的同时会生成多维特征图,注意力机制可以在成百上千的特征点中聚焦更为关键的信息,增强来自全局的感受野[15]。 通道注意机制主要分为特征提取、计算得分和权重分配3 部分。 输入模块经过两层的3*3 卷积提取,假设一个神经层中的输入序列X= [x1,x2,x3,…,xn],首先通过线性变换得到3 组向量序列:
其中,Q、K、V分别为查询向量序列、键向量序列和值向量序列;WQ、WK、WV是可以学习的参数矩阵,输出后的维度保持不变。
通过全局平均池化的方式压缩通道上的特征信息,再经过打分模型公式:
计算注意力得分,利用softmax 对注意力得分转换到0~1 后,计算注意力分布:
最后,采用加权求和的方式对输入信息进行汇总,得到注意力值:
注意力值可以帮助模型在训练时重新分配更佳的权重,通道注意力模块在训练中能够学习通道之间的相关性,抵抗噪声和遮挡无关干扰。 在模块中采用了卷积核的卷积层,仅引入少量参数就可提高模型的精度[16-17]。
1.4 回归结果处理
图片信息输入到网络后,经过最后的FC 层,回归结果有4 类,即检测到手机、烟头和手,或者是三者都未检测到。 为了提高模型的鲁棒性,本文采用交并比算法判定检测结果。 当检测到手机或烟头时,会进一步判断是否检测到了手部,通过手部和手机或烟头的预测框IOU占比计算,判断驾驶人员是否在玩手机或吸烟。 这里的IOU为手部和手机或烟头的预测框的交并比,其计算公式如下:
IOU数值介于0~1 之间,反映了两个集合之间的相似度。 如图3 所示,其中的A 代表手部的预测框,B 代表手机或烟头的预测框,分子是两者的交集,分母是两者的并集。 通过设定IOU的阈值来判断手部和手机烟头是否存在接触,增加了预测的精确度。
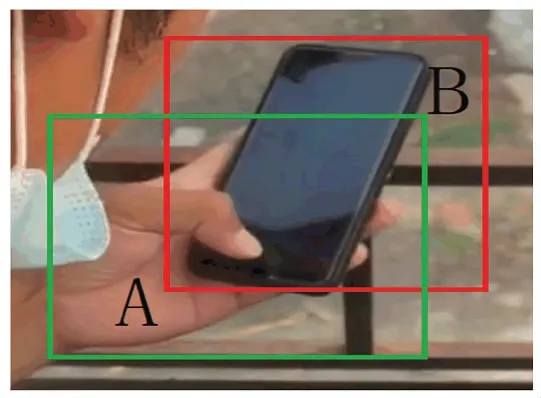
图3 IOU 占比图Fig. 3 Proportion of IOU
2 实验结果与分析
2.1 数据集处理和训练参数设定
训练前将图片尺寸变换成244*244 大小,并对数据进行归一化处理。 为了提高泛化性能,本文对数据进行了增强处理:
(1)对现有数据进行旋转、平移、缩放和填充;
(2)在图像中加入椒盐噪声和高斯白噪声,扩充数据集。
训练过程中,训练集和验证集按照8 ∶2 分配。实验训练环境为:Ubuntu18.04 +NVIDIA GeForce RTX 3080 +AMD 锐龙R7 - 5800 +Pytorch1. 8 +python3.7;模型训练70 轮,学习率为0.001,每20 轮降一半;根据图4 中不同IOU阈值的精确度对比,阈值设置从0.3 增大到0.9 时,分类精度曲线先增后减,对于玩手机行为的分类精度在0.5 时达到最高,抽样行为的分类精度则在0.6 时达到峰值。
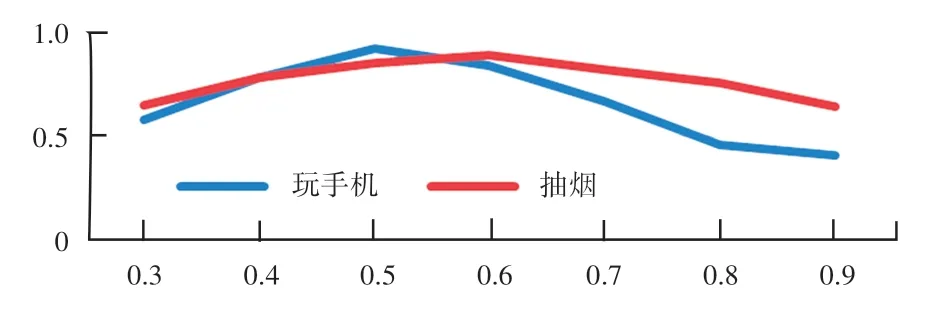
图4 不同的IOU 阈值下的分类精度Fig. 4 Classification accuracy under different IOU thresholds
2.2 评价指标
评价指标可以衡量有一个模型的好坏程度,传统的指标是精确度(P) 和召回率(R)。 其中,P的含义是真正例在所有预测为正例中的比例,R的含义是真正例在所有样本正例中的比例。 计算公式如下:
因为P和R本身就是一对冲突的度量,为了兼顾P和R,采用F1 分数作为指标。F1 可理解为P和R的加权平均值,F1 分数被归一化到0~1 之间,1为最佳分数,0 则为最低分数。F1 表达式如下:
实时性指标则采用FPS,其含义为每秒传输帧数。FPS越高,则代表实时性越好。
由图5 可知,到达70 轮时,实验训练和验证的loss都达到了底部,趋于稳定,训练和验证的acc达到了最高值。
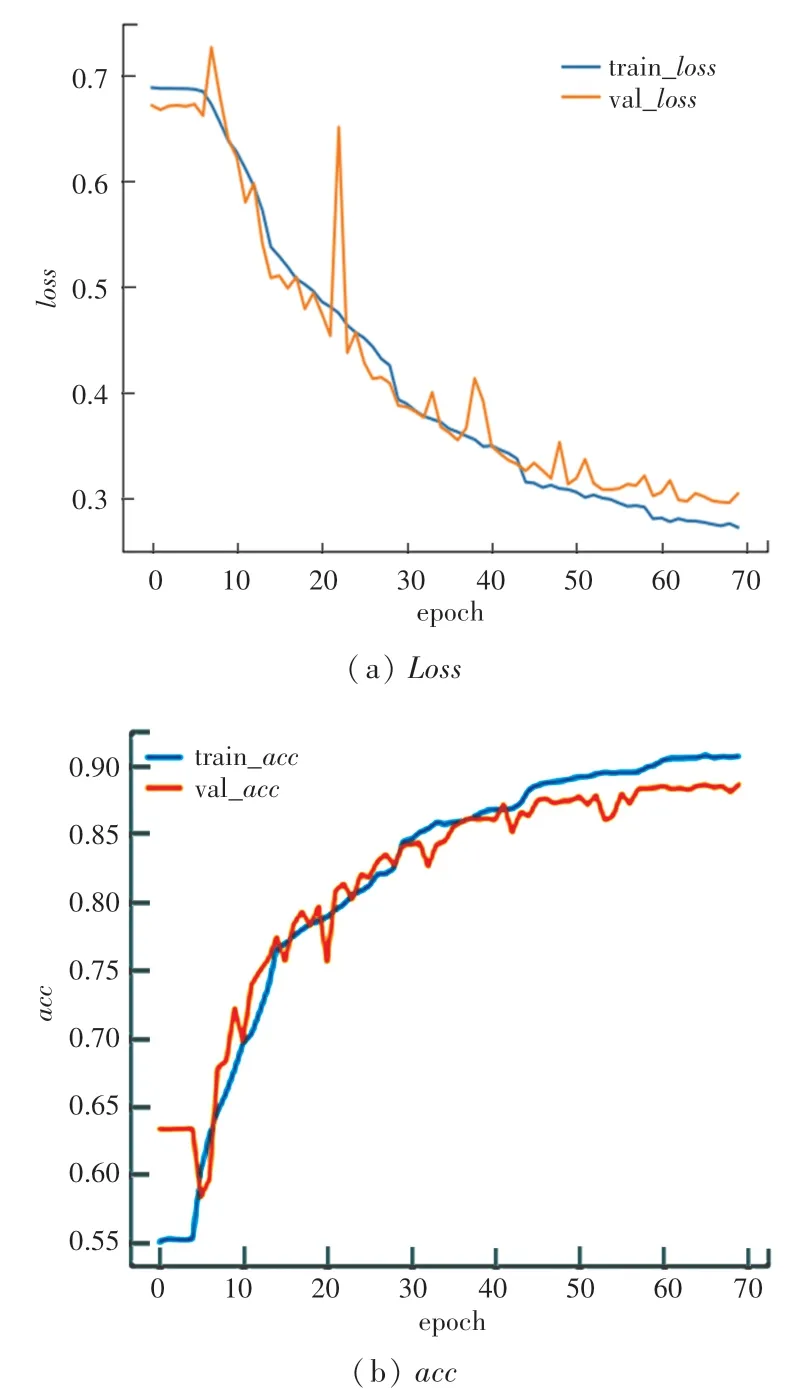
图5 实验的loss 和acc 图Fig .5 Loss and acc diagram of experiment
在ResNet 中的第二个和第三个大残差块中,将其中的小残差块进行整合,输入特征图经过多层卷积,先将输入信息送入大小为3×3 的卷积核,再输入到1×1 的卷积核中,对输入进行降维,经过一次重复操作,设置第三层步长S, 进行上采样,最后将输入与输出融合后送入激活函数。 具体的处理过程如图2 所示。
2.3 实验结果分析
为了更直观体现改进后网络和原网络的区别,本文逐一添加各个模块进行对比实验,结果见表1、表2。
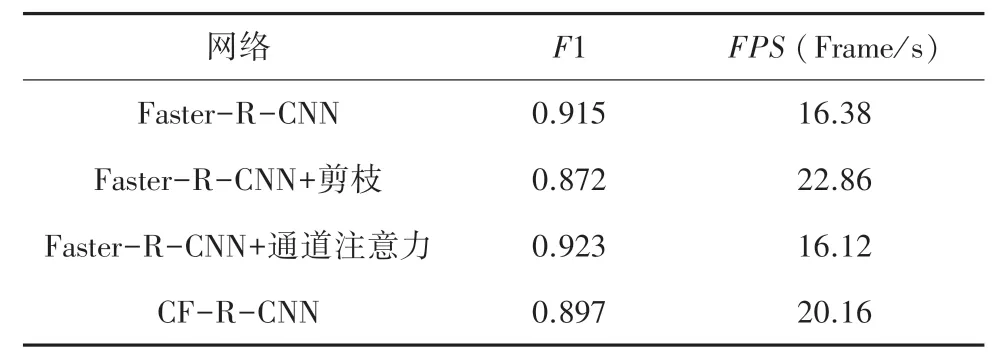
表1 逐一加入各个模块下的性能对比Tab. 1 Performance comparison under each module added one by one
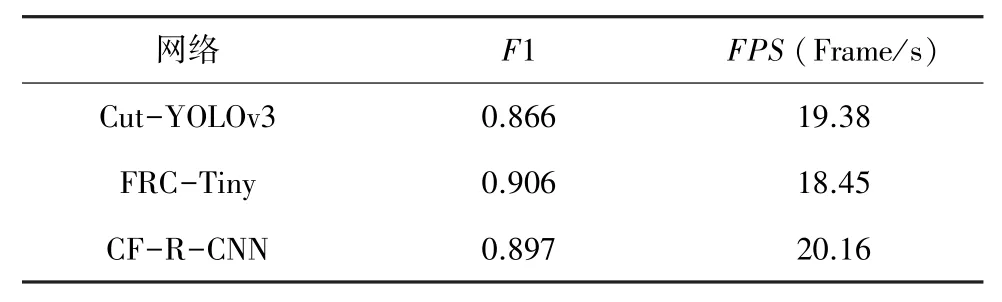
表2 与引言其他(不同)模型的性能对比Tab. 2 Performance comparison with other (different) models in the introduction
由表1 可知,原生Faster-R-CNN 网络在剪枝处理后的网络在FPS上提升39.5%,但精度降低了4.9%;添加通道注意力机制后,FPS数值上略微下降,F1 提高了0.8%;将上述算法融合改进后,网络的F1 值相比原网络只降低了2.1%,但FPS提高23%,兼顾了精度和实时性的要求。 因此,本文提出的模型在精度和实时性上优于Cut-YOLOv3 和FRC-Tiny模型。
表2 中,CF-R-CNN 模型的FPS值为20.16,F1 数值为0.897,对比Cut-YOLOv3 模型,FPS和F1数值分别提高了3.6%和4.0%;对比FRC-Tiny 模型,F1 数值下降了1.0%,但FPS提高了9.3%。
如图6 所示,Faster R-CNN 方法能够正确的识别出数据集中的手机、烟头和手,并在图片中标记。
3 结束语
本文针对现有的驾驶人员行为监测方法不适用性、效率低和效果差等情况,提出了一种改进的Faster R-CNN 方法。 结合手部检测的方式,对Faster-R-CNN 的ResNet101 模块进行了剪枝处理,并融合注意力机制等方法。 改进后网络的F1 值相比原网络仅降低了2.1%,但FPS相比提高了23.0%,满足在移动端部署的要求;同时使用了交并比阈值的方法,提高了检测的精度。
虽然本文的实验研究对塔式起重机驾驶人员行为起到督促和监测的作用,对维护工地安全方面有一定的贡献,也存在着不足,如在极端情况下会发生漏判等问题。 后续可考虑对手部进行3D 建模等处理,增加手部和手机烟头的特征关联性,提升检测效果。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
保健医苑(2022年5期)2022-06-10
科技与创新(2021年21期)2021-11-29
就业与保障(2021年9期)2021-11-22
成都信息工程大学学报(2021年6期)2021-02-12
汽车实用技术(2019年9期)2019-11-25
农村百事通(2018年16期)2018-09-29
天津诗人(2017年2期)2017-03-16
实用手外科杂志(2015年4期)2015-08-27
中华皮肤科杂志(2014年4期)2014-12-19