中压配电网分布式智能后备保护方案
2023-09-21 09:18:32高崇陈沛东曹华珍何璇李建明林凌雪
南方电网技术 2023年8期
高崇,陈沛东,曹华珍,何璇,李建明,林凌雪
(1. 广东电网有限责任公司电网规划研究中心,广州510308;2. 华南理工大学电力学院,广州 510640)
0 引言
随着分布式光伏发电在用电侧快速发展,配电网正从单端供电形态向有源配电网转变。新型配电系统需要安装数量庞大的智能终端以应对分布式电源的监控和配电系统的保护、自愈、电压调控等运行控制需求[1]。分布式协同控制具有可靠性高、可扩展性强、通信计算负载均匀等特点,是含高渗透率分布式电源接入的有源配电网控制保护的重要发展方向[2]。作为一类网络控制方法,分布式控制模式通过参与个体之间的直接通信联系进行控制决策。各参与个体利用各自的邻居节点及其自身的状态信息,按照内部规则更新对状态的判断,决定控制策略[3],在应对快速变化的扰动时不依赖调控中心的集中式决策。
近年来,供电企业已经开始探索在城市中压配电网主干回路和重要节点配置断路器和继电保护功能,实现故障的快速有效隔离,缩小故障停电范围[4-8]。由于中压配电网分支分段多,开环点变化频繁,拓扑结构多变,加之分布式电源短路期间暂态电流特性与常规电源差异显著[9-10],因此适用于高压电网的需要根据运行方式整定的距离保护和过流保护难以推广[11-14]。目前,智能分布式网络化保护在配电网通信条件较好的城市配电网中开始应用[15]。随着5G 技术的进步,5G 通信将进一步拓展分布式配电网保护和控制的应用范围[16-17]。
目前对中压配电网的主保护策略研究成果较为丰富[15-19],对后备保护的研究则很少。中压配电网普遍通信条件差,运行环境恶劣,二次设备运维能力弱。这些因素极大地削弱了主保护动作的可靠性[17],迫切需要研究分布式的智能后备保护逻辑,在应该动作的主保护所在终端失效或开关拒动时,通过相邻环网点智能终端的后备保护逻辑隔离故障区段,实现保护范围的扩展和保护功能的相互备用。
在主网层面,利用广域通信技术实现后备保护功能的研究已取得较大进展。文献[20]提出了一种集中式广域保护系统结构,当发生故障时,区域内各个子站确定距离故障元件最近的输电线路,并将相关信息发送给主站,主站进一步确定候选可疑故障线路,获取该线路的保护方向元件动作情况,识别出实际故障线路。文献[21]提出了一种基于故障电压分布的广域后备保护算法。该算法利用相量测量单元(phasor measurement unit, PMU)测得的线路一侧电压量推算另一侧电压故障分量,结合多种信息识别故障元件。文献[22]综合线路纵联电流差动保护和阻抗保护特性,提出了一种广域方向保护算法,将母线电压与线路两端同步差电流构建复合阻抗及其判据,提高故障区域定位准确性。该方法对采样同步性要求较高。文献[23-24]均提出了基于综合阻抗的纵联线路保护原理,利用故障时两端电压相量和与电流相量和的比值来判断线路上是否发生故障。目前,针对配电网的分布式决策型后备保护策略研究尚未见报导。
本文针对环网结构下开环运行的中压电缆网,基于分布式保护思路,提出了一种配电网智能后备保护实现逻辑。其特点包括以下几个方面。
1) 无需复杂的时延整定,采用动态阈值的方式来启动分布式保护。充分利用相邻环网点的智能保护终端之间的信息交互,辅助实现故障区段的定位和动作协同,且通信量要求低;
2) 设计了多样化的故障判据,在通信故障、智能终端(smart terminal unit,STU)故障、开关拒动等多种异常状况下均能有效实现后备保护功能,适应中压配电网环境条件,具有一定的容错性;
3) 采用分布式决策思路,相较于集中式更加灵活可靠。
本文详细介绍了所提出的分布式后备保护的启动机制、故障信息校正规则以及故障区段识别和开关动作决策的过程,通过有源配电网故障仿真算例验证了该方法的有效性。
1 分布式智能后备保护的工作原理
以图1 所示中压电缆单环网为例,智能终端(smart agent, SA)以环网点为单位部署,负责一个配电环网点的母线电压、支路电流和开关状态的运行和控制监控,如图1中SA均为智能终端。
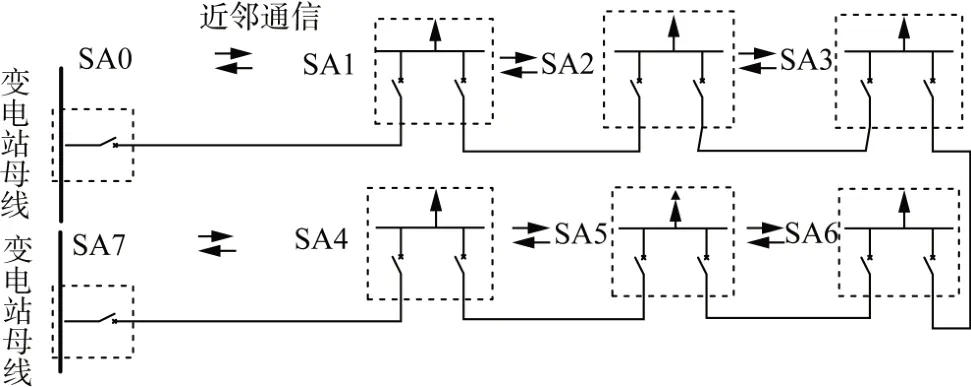
图1 中压电缆网中的智能终端配置Fig.1 STU deployment in the cable-based medium voltage distribution network
SA 是新型配电系统中对中压配电网和分布式电源实现分布式控制和管理关键一环。它基于物联网和平台型智能终端的设计理念,可通过服务装载和调用的方式集成配电网运行所需的保护、监测、控制、通信管理、分布式电源管理等功能。所有控制、保护服务共享SA 采集的环网点运行监测数据。SA 可以与其近邻点对点通信,经过信息交互不断刷新电网局部拓扑信息,尤其是环网点之间的上下游关系。本文研究的就是其中一项功能—分布式后备保护功能的设计和实现方案。
当某条馈线发生故障时,该馈线上的分布式智能后备保护的工作流程如下。
1) 所有SA 的后备保护模块感知到故障的发生,进入启动状态并记录引起模块启动的故障判据标识;
2) 各SA 与近邻SA 交换故障判据标识,并依据近邻的判断校准自身的故障判断;
3) 到等待延时结束时,如果SA 检测到故障信号始终存在,则做出相应开关动作决策。否则退出启动状态,复归新一轮巡检。
以下分别介绍各关键环节的判据和实现策略。
2 分布式智能后备保护的关键环节
2.1 故障启动判据
含有光伏发电等变流器并网型电源的有源配电网中,电网短路故障下各环网点感知的支路运行状态变化与传统无源电网有显著区别。对于配电网故障下光伏等分布式电源提供短路电流的变化情况已有比较全面的研究成果,可归纳如式(1)—(2)所示[25]。
式中:IPV为光伏分布式电源提供的短路电流;IN为额定电流;U为环网点母线电压;IDFIG为双馈风机分布式电源提供的短路电流。
如图2 所示,以电缆网为例说明本文采用的名词和标记。对于开环运行方式的馈线,从高压变电站到馈线上任一点之间有且只有一条联通路径,称为主通道。例如图2中从变电站至L5上短路点的主通道为L1→L2→L3→L4→L5。任一个环网点的所有进出线中,属于到变压站主通道的支路称为进线支路,其他支路均为出线支路。进线支路的对端节点称为上游节点,其他近邻节点均为其下游节点。以图2中SA5所在环网点为例,开关k1—k4所控制的4 条支路中k1 所在的L4 为进线支路,其它均为出线支路。SA5 有2 个近邻:SA4 和SA6,其中SA4为上游近邻,SA6为下游近邻。
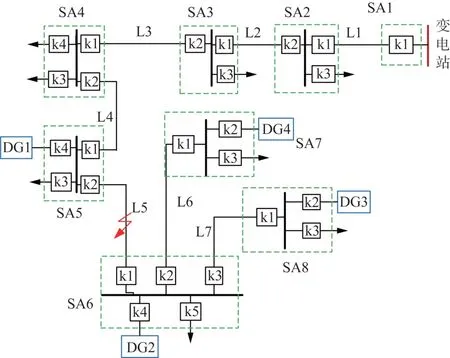
图2 8节点配电网及其智能终端示意图Fig.2 Schematic diagram of 8-node distribution network and its STU deployment
对于含有大量分布式电源(distribution generation,DG)的有源配电网,正常运行时各环网点的支路电流可能有以下两种情况。
1) 若下游DG 功率超过负荷需求,则功率倒送,进线支路电流方向与正常相反。由于负荷的存在,电流值一般远小于下游支路分布式电源的额定电流之和。无DG的支路流过负荷电流。
2) 若下游DG 功率小于负荷需求,则进线支路电流为正向。由于分布式电源的存在,电流值一般小于下游负荷电流之和。
当开环运行的配电网线路上发生短路故障时,各环网点检测到的短路电流幅值情况如下。
1) 对于故障点到高压变压站之间的主通道经过的所有环网点,其进线支路和属于主通道的一条出线支路将流过远大于正常值的短路电流;其他出线支路中,下游接有分布式电源的支路将流过分布式电源提供的短路电流,方向为注入节点。无DG的支路电流接近零。
2) 对于故障点下游所有环网点,其进线支路电流为反向,数值接近或略高于下游分布式电源的额定电流之和。下游支路中接有分布式电源的支路将流过分布式电源提供的短路电流,纯负荷支路电流接近零。
根据上述分析,本文提出后备保护的启动策略为满足以下3个条件中的任意1条。
2) 判据2。节点电压V≤0.9 且进线支路|I1|≤且至少1 条出线支路满足,I1、分别为进线支路正序电流、电流阈值系数、该支路的正序电流阈值。
3) 判据3。节点电压V≤0.9 且进线支路|I1-且至少1 条出线支路满足|I1-IGN|≤分别为分布式电源的电流限幅值、电流阈值系数。
上述判据中,判据1 适用于故障点到高压变压站间主通道上的环网点,通常取系数大于2。判据2 适用于不在故障点到变压站主通道上的环网点,且环网点出线支路无分布式电源的情况,通常取系数小于0.3。判据3 适用于不在故障点到变压站主通道上,且环网点出线支路含有分布式电源的情况,通常取系数小于0.1。
考虑到新能源发电和负荷功率的波动性,本文采用动态阈值设定方式,具体如式(3)所示。
式中:Ith(k)为当前计算的电流动态阈值;M为预设的记忆点数;I(k)为当前更新时步的正序/零序电流有效值;k为计算次数。考虑到光伏功率的波动一般在分钟级才比较明显,推荐动态阈值的更新步长为10~30 s,M取值5~10。采用动态阈值可以适配运行方式的变化滚动更新,且无需人工整定。
一旦SA 检测到某条启动判据满足,则后备保护进入启动状态,并记录故障判据的标识。本文分别采用“ST1”、“ST2”、“ST3”表示是上述“判据1”、“判据2”或“判据3”启动了后备保护。
2.2 故障信息交互
分布式后备保护的关键环节之一在于依靠近邻SA 之间交换各自的故障判别情况,提高每个SA 对故障判别以及故障位置判别的准确性。由于交互的信息是判断结果,而不是实时量测量,因此本文后备保护方案对SA的时间同步性没有要求。
本文设计SA向其近邻发送以下4个关键信息。
1) 故障判别结果,简记为A1:N、F 分别代表没有故障以及存在故障;
2) 故障判据标识,简记为A2:ST1、ST2、ST3、NULL 分别对应2.1 节的3 个判据以及无判据满足;
3) SA 进线支路的本侧开关状态,简记为A3:1和0分别表示开关闭合与断开;
4) SA与对侧SA相连支路的本侧开关状态,简记为A4:1和0分别表示开关闭合与断开。
本文定义以逗号分隔以上4 个字段来表示完整的交互信息。例如,图2 所示故障下,SA5 发给SA6的交互信息表示为:F,ST1,1,1。
根据2.1 节的分析,上述信息給SA6 提供了以下清晰的说明:上游节点检测到了故障,而且故障发生在支路L4的下游。
2.3 基于交互信息的故障状态判断校正
基于所有近邻SA 的故障检测信息,SA 可根据图3 所示规则进行自身故障判别结果的校正。故障状态校正环节能显著提高后备保护故障检测的准确性。
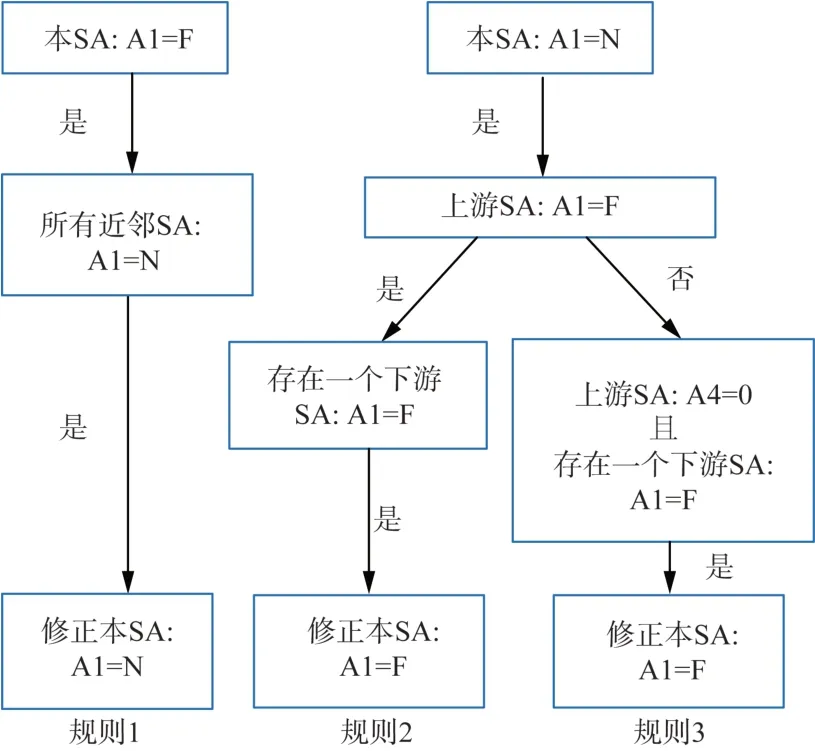
图3 故障状态校正规则Fig.3 Fault state correction rules
2.4 故障定位与后备保护智能动作决策
后备保护的目标是当任何原因导致故障所在支路未被主保护及时与电网隔离时,延时断开故障区域,并尽可能缩小被隔离区域影响的用户数量。
仍以图2 所示故障为例,说明需要后备保护动作的场景、各SA 观测量以及正确的后备保护动作行为。图2 所示故障下,正常应由SA5 和SA6 的主保护动作,断开SA5-k2 和SA6-k1 两个断路器,隔离故障区段L5。需要后备保护动作的场景如下。
1) 场景一:因主保护异常或者断路器动作异常等原因,SA5-k2 或SA6-k1 其中之一未能断开,或两者均未能断开。但SA5和SA6的采样、通信等其他环节正常。
此时,影响范围最小的后备保护动作策略分别为:(1)若SA5-k2 未断开,则断开SA5-k1、k3 和k4;(2)若SA6-k1未断开,则断开SA6-k2,k3,k4和k5。
针对场景一,提出后备保护对故障区段的判别规则如图4所示。
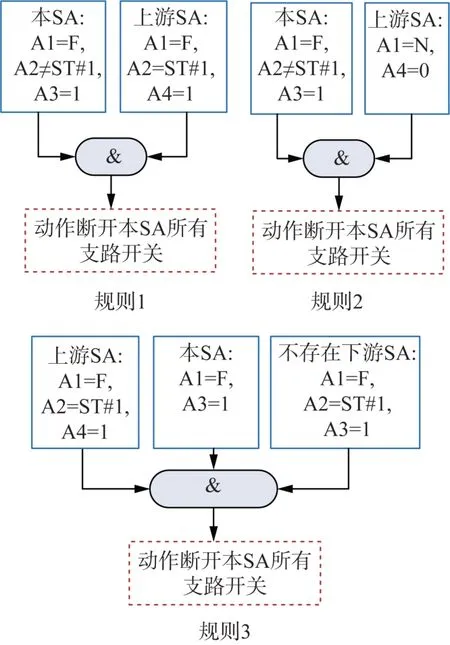
图4 后备保护动作决策规则1—3Fig.4 Backup protection action decision rules 1—3
2) 场景二:因SA 装置失效、通信异常或采样异常等原因,导致SA5-k2 或SA6-k1 其中之一未能断开。
此时,影响范围最小的后备保护动作策略分别为:(1)若SA5 异常,则SA4 动作断开SA4-k2;(2)若SA6 异常,则SA7 和SA8 动作断开SA7-k1 和SA8-k1。
针对场景二,后备保护对故障区段的判别规则如图5所示。
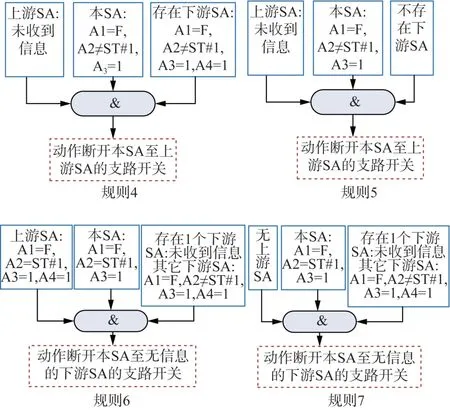
图5 后备保护动作决策规则4—7Fig.5 Backup protection action decision rules 4—7
此外,本文还考虑了SA 对外通信完全中断情况下的后备保护动作逻辑。此时可以设置后备保护动作时延略长于常规的后备保护动作时延。如果在后备保护时延期间故障信号始终存在,则在时延到达时断开与外界失去联络的SA的所有支路开关。若以上规则均未启动,则SA后备保护无动作出口。
3 算例测试与结果分析
以图2 所示的8 节点配电网为例检验所提后备保护的有效性。采用Simulink 编程实现故障模拟和后备保护的动作仿真。故障设置为:t=1.1 s时支路L5 中点发生A 相单相弧光接地故障,故障点接地阻抗为0.1 Ω。
分别设计了3 种需要后备保护动作的运行场景,以验证后备保护功能的有效性。
1) 场景1:SA6 主保护正确判断并断开SA6-k1,SA5 主保护正确发出动作指令,但因SA5-k2断路器拒动,未能分闸。
2) 场景2:SA6 主保护正确动作断开了SA6-k1,但SA5上的主保护因采样环节故障,未能检测到故障。SA5对外的通信正常。
3) 场景3:SA5 主保护正确判断并断开SA5-k2开关,但SA6装置异常,且对外通信故障,未能断开SA6-k1。
3.1 后备保护动作仿真
3.1.1 场景1的后备保护工作过程
各智能终端SA 的故障状态初判结果如表1 所示。该场景下,SA6 侧开关正确动作,将故障点下游的3 个节点SA6、SA7 和SA8 的支路与故障段隔离,所以故障点下游故障判断结果都是ST2。
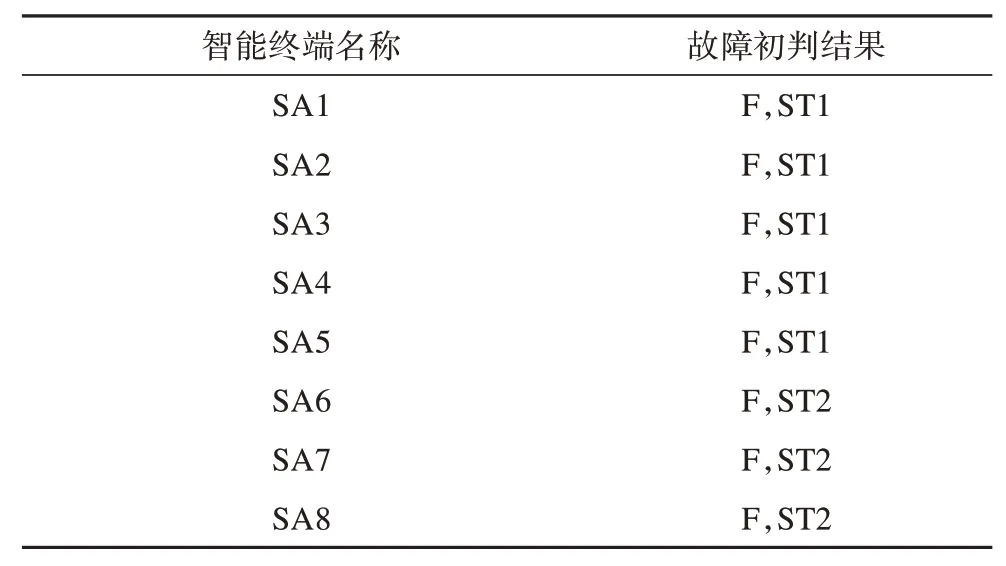
表1 各SA故障初判结果Tab.1 Preliminary diagnosis results of SA faults
各SA信息交互如表2所示。
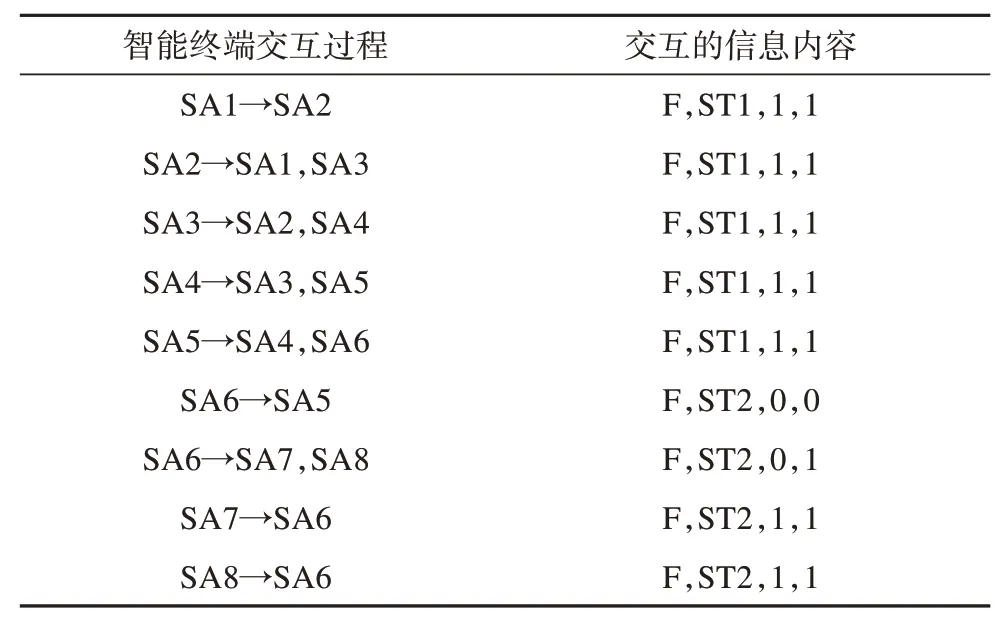
表2 各SA信息交互结果Tab.2 Results of information interaction among neighbor SAs
由于各SA 判别正确,没有触发校正规则。各SA 后备保护动作决策结果为:SA5 后备保护根据决策规则3,动作断开SA5-k1、SA5-k2、SA5-k3和SA5-k4开关,正确隔离故障,SA1—SA4恢复正常供电。
3.1.2 场景2的后备保护工作过程
场景2 下除SA5 之外,其他智能终端的故障状态检测结果与表1 相同。但SA5 由于采样环节故障,其故障初判结果为:N,NULL。相应的SA5发送给近邻的交互信息如表3所示。
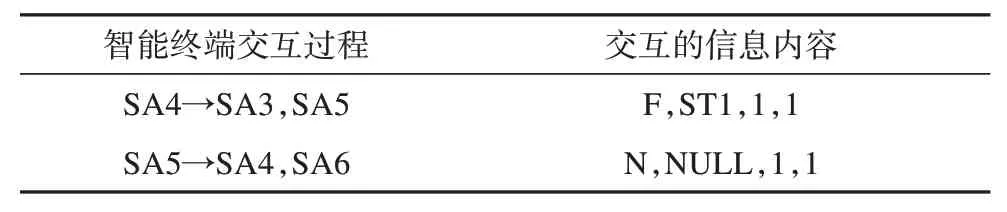
表3 SA5发送给近邻的交互信息Tab.3 Information interaction among neighbors of SA5
在接受到近邻SA 的故障检测结果后,SA5 故障状态判断校正环节的规则2 被激活,将SA5 的故障判别信息修正为:F,NULL,1,1。从而在后备保护动作决策环节中,SA5 做出了与场景1 相同的正确动作决策。
3.1.3 场景3的后备保护工作过程
场景3 中SA5 主保护正确动作断开SA5-k2 开关,上游SA 均恢复正常供电,故障初判结果为:N,NULL。由于SA6 工作状态异常,下游SA7-SA8则检测到故障,如表4所示。
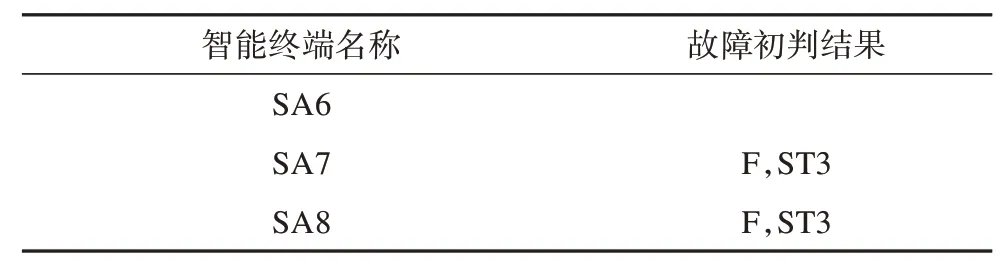
表4 各SA故障初判结果Tab.4 Preliminary diagnosis results of SA faults
SA6 因故障没有发送信息到近邻的SA5、SA7和SA8。到达后备保护延时后,SA7 和SA8 的后备保护均根据规则5 动作。其中,SA7 断开上游开关SA7-k1,SA8 断开上游开关SA8-k1,正确隔离故障;SA1—SA5供电未受影响。
3.2 动态阈值的仿真校核
S6—S8 的4 个光伏单元分配设置不同的日出力曲线。图6以S6环网点为例给出了日内节点的光伏功率、负荷功率以及净负荷情况。可以看出在中午12:00—13:00期间光伏功率超过了节点负荷,净负荷为负值。
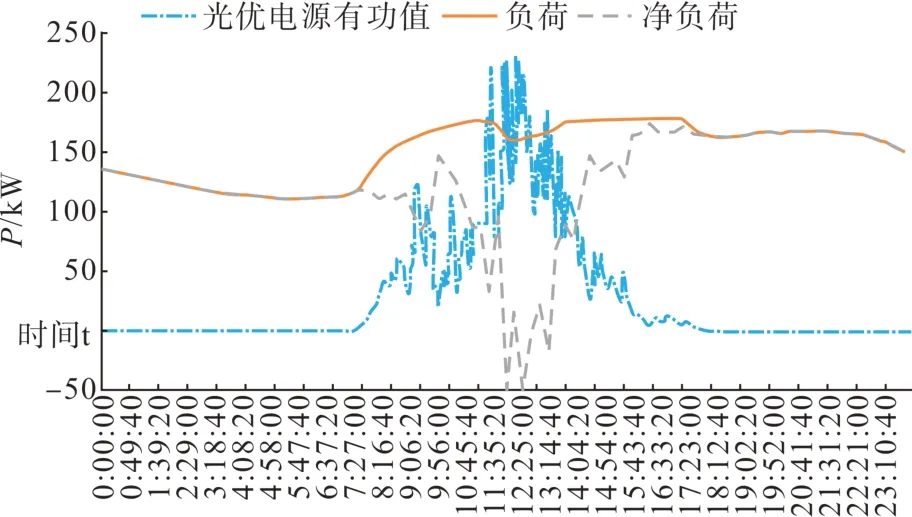
图6 光伏电源出力情况Fig.6 Output of photovoltaic power supply
仍以场景一线路L5 故障、主保护未动作为例,分别设置12:05、13:05 和14:05 等3 个不同时间点发生故障。算例取动态阈值更新步长10 s,M=6。表5 给出了S6 所在环网点的5 个开关的正序电流动态阈值。可以看出,动态阈值跟随负荷变化。
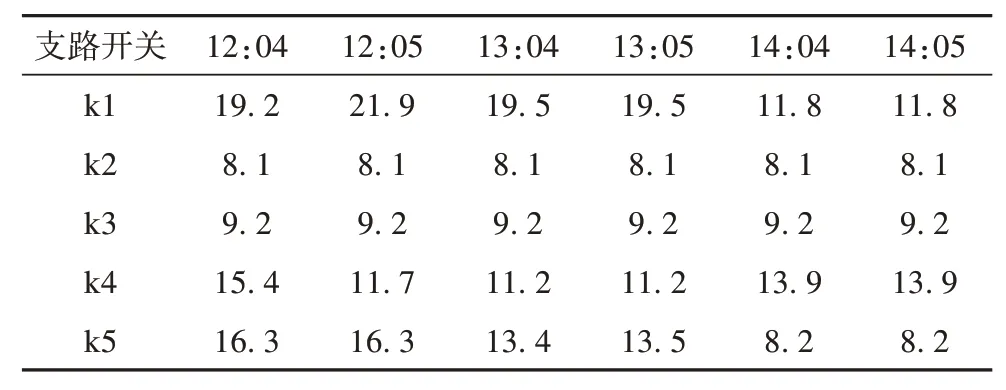
表5 各开关支路的动态阈值Tab.5 Dynamic threshold of each switch branch
表6 为故障前后的开关电流量测值,其中负号表示流出节点。可以看出,其中12:05 时刻光伏出力超过负荷功率,14:05 时刻光伏发电低于负荷需求。由于2.1 节的判据采用电流及其变化量的绝对值,不受潮流方向的影响,测试表明3 个时刻保护均能根据判据二正确启动。
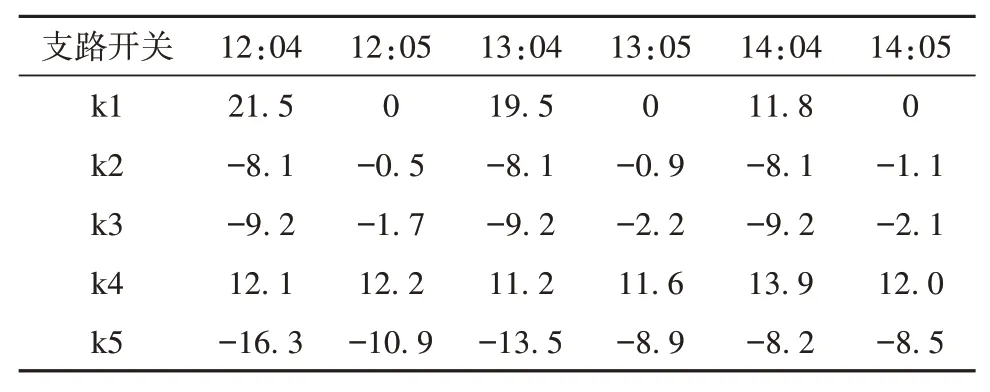
表6 故障前后各开关支路正序电流Tab.6 Positive sequence current before and after of each switch branch
4 结语
本文提出了一种基于动态阈值和交互式校正决策的分布式智能后备保护。该后备保护机制可通过智能保护终端与近邻之间的信息交互,实现对故障区段的正确判别和后备保护动作的相互配合。依靠内置规则可以在通信故障、SA 故障、开关拒动等多种异常状况下实现有效的后备保护,具备较好的容错性。
猜你喜欢
今日农业(2022年16期)2022-09-22 05:39:18
汽车工程师(2021年12期)2022-01-17 02:29:50
现代畜牧科技(2021年4期)2021-07-21 06:12:56
能源工程(2020年6期)2021-01-26 00:55:22
印刷工业(2020年4期)2020-10-27 02:46:16
冰雪运动(2020年2期)2020-08-24 08:34:22
现代金融(2016年7期)2016-12-01 04:50:22
电信科学(2016年9期)2016-06-15 20:27:30
电测与仪表(2016年13期)2016-04-11 11:21:20
电工技术学报(2014年7期)2014-11-15 05:53:48