
站台门门机控制系统的国产化应用研究
2023-09-21 09:58郭顺利钟建峰
现代城市轨道交通 2023年9期
郭顺利,李 樊,李 帅,钟建峰
(中国铁道科学研究院集团有限公司电子计算技术研究所,北京 100081)
1 引言
当前半导体/集成电路行业面临的问题主要有2个:①核心技术和供应链受制于人,自主可控程度低;②受国际环境影响,国内供应链受阻,价格高。轨道交通作为国民出行的重要交通方式之一,为响应国家号召,提升发展水平,长久以来一直致力于实现关键设备的自主可控。站台门控制系统是轨道交通中应用场景多、应用数量大且关乎乘客生命财产安全和车辆运营安全的重要组成部分,其核心技术和控制系统长期受制于国外半导体供应链,不利于站台门行业的健康发展。实现站台门装备自主化及自主供给,摆脱核心技术和供应链受制于人的局面是本文研究的重点。
本文论述了站台门控制系统的构成,剖析了站台门门机控制系统的核心部件门控单元(DCU),阐述了传动机构对直流无刷电机的控制原理,并设计出以自主化设备作为处理器和逆变单元的门机控制系统,经过在京张高铁站台门项目样机上的试验验证可知,自主化门控单元在滑动门控制过程中运行流畅平滑,具有良好的可靠性、鲁棒性,满足实际工程项目中的应用需求。
2 站台门控制原理
2.1 站台门控制系统的构成
站台门控制系统主要由中央控制盘(PSC)、门机系统、电源系统以及各种操作单元组成,站台门控制系统如图1所示。PSC主要负责数字信号处理及逻辑指令传输。 DCU是门机系统的关键部件,负责控制2扇滑动门按照设定速度曲线进行开/关门动作,门控单元数量多且与行车直接相关,在站台门控制系统中尤为重要。
2.2 直流无刷电机工作原理
目前行业内多采用直流无刷电机作为执行机构,负责驱动滑动门进行开/关门动作。直流无刷电机精确稳定控制是DCU研究的难点和重点,实现对电机精准、速度平滑、脉动转矩小的控制,也是DCU设计的出发点和基本原则。
DCU主要任务是通过驱动电路控制直流无刷电机电压、电流、频率等控制量,改变传动机构的转矩、速度、位移等机械量,使站台门按照设定的运动参数进行开/关门动作。直流无刷电机驱动主电路原理如图2所示,由6个场效应管(MOSFET)和直流无刷永磁电机组成。控制信号采用近似正弦的空间矢量脉宽调制(SVPWM)数字信号。三路控制信号各差120°。驱动器根据直流无刷电机给定位置和反馈信号,经过SVPWM控制算法产生6路驱动信号,最后通过智能功率模块(SPM)输出合适的电压和电流,控制直流无刷电机的转矩和转速带动站台门进行开/关门动作。电机需要反向旋转时,只需要调整控制信号触发类型控制寄存器即可。DCU驱使直流无刷电机按照设定的速度曲线运作,进而带动滑动门执行开门、关门以及防夹等功能。
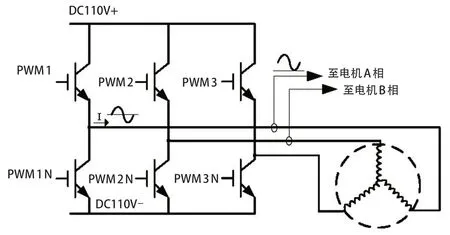
图2 直流无刷电机驱动主电路原理图
2.3 直流无刷电机的调速特性
通常在门机控制系统中,不但要求滑动门在运动过程中具有很好的启动特性,而且要求在加速、匀速、降速过程中具有良好的调速性能。由于采用了脉宽调制方式,假定电枢电流连续,动态电压方程为:
式(1)中,U是电源电压,V;E是电枢绕组反向电动势,V;Iacp是电枢电流,A;racp是电枢电阻,Ω;ΔU是绝缘栅双极晶体管(IGBT)管压降,V。
直流无刷电机的电枢绕组反向电动势与转速之间关系如下:
式(2)中,n是电机转速,r/min;Ke是反向电动势系数,V / r · min-1。
由式(2)可推出
式(4)中,M表示转矩,N · m;Km是转矩常数,N · m /A。由式(4)可知,假定转速不变,改变母线电压U可以控制直流无刷电机输出转矩M;转矩不变时,可改变电压实现转速控制。因此直流无刷电机的调速特性良好,通过调节母线电压极易实现平滑调速。滑动门在开/关门过程中碰撞到障碍物时,将导致直流无刷电机的转速骤降,由式(2)可知当直流无刷电机的转速骤降时电枢绕组的反向电动势E同时骤降,又由公式(1)可知,反向电动势E减小时电枢平均电流Iacp快速升高。DCU采用电枢平均电流上升和转速骤降2种方式进行站台门遇阻判定,2 种方式融合后能更有效的应用在复杂的站台门运营环境中。DCU确认站台门遇阻后,发出门报警指示并将遇阻状态发送至PSC控制系统。
3 自主化硬件系统设计
3.1 核心 MCU 选择
站台门门机系统是由芯片完成信号处理及运动控制的。处理器芯片相当于门机控制系统的执行大脑,占据关键位置。站台门门机控制系统自主化重在应用国有芯片实现站台门的运动控制。通过对芯片(IC)市场调研和各种类型IC遴选,从兆易创新、龙芯中科、航顺、华为海思、清华紫光、中芯国际等市场主流及使用量较大的产品中选取3款IC进行初步的方案比选,比选清单如表1所示。
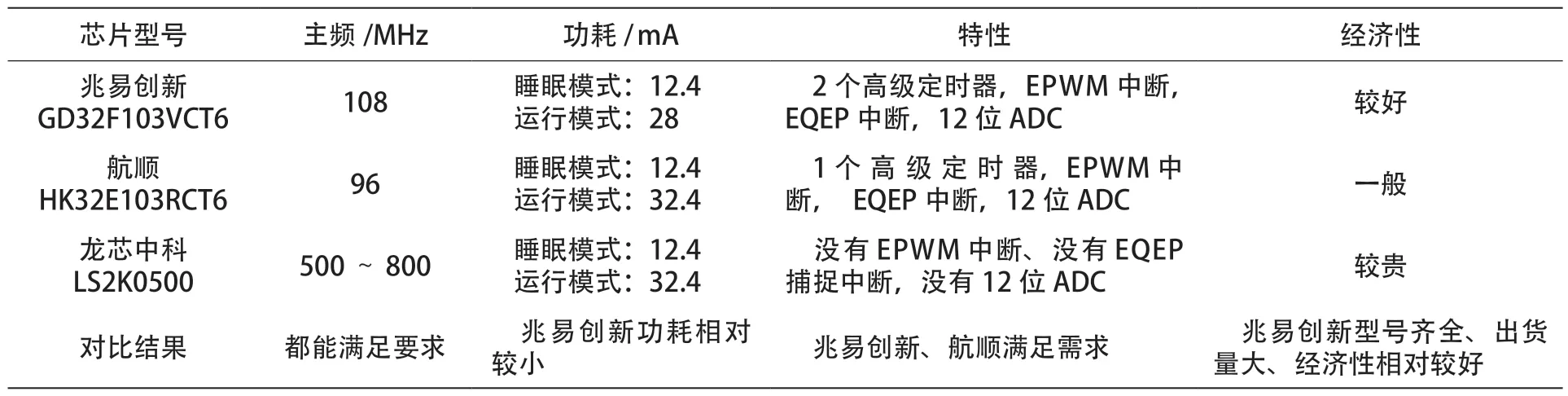
表1 国产MCU方案对比清单
从表1可知,在电机控制方面,兆易创新、航顺具有优势;在经济方面,兆易创新GD32处理器已经发展成为中国32位通用处理器(MCU) 市场主流之选,并以累积超过6亿颗的出货量、超过2万家的客户数量,应用覆盖率稳居中国本土首位,价格较同类型MCU便宜很多。从芯片的主频、存储、经济性、场景应用等方面综合考虑,最终选取兆易创新GD32F103VCT6作为门机控制系统的MCU。
3.2 自主化硬件电路设计
站台门门机控制系统的硬件系统主要由主电路、开关电源、母线状态采样、输入/输出(I/O)信号、RS485通信、反向电动势吸收、电机驱动、处理器等组成。自主化硬件电路设计结构如图3所示。
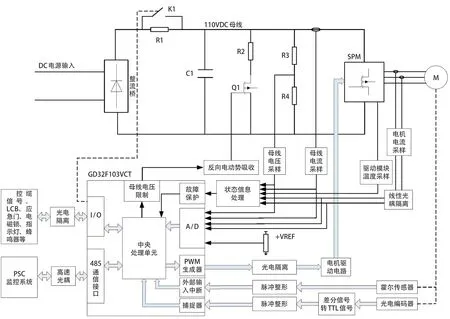
图3 自主化硬件电路设计结构图
整体设计思路为DC电源输入经过整流桥矫正电源正负极方向后,为门机控制系统供电;检测回路实时检测110 V母线电压、电流、SPM温度及直流无刷电机的转速,其中母线电压、电流和SPM温度的采样信号为模拟信号,需通过模数转换器(A/D)将模拟信号转换为数字信号传入处理器;转速采样信号为数字信号,通过光电编码器对直流无刷电机进行数字测速。门机控制系统还具备系统自检及故障检测功能,对直流无刷电机的电压、电流信号进行实时检测和分析,若出现故障可立即采取措施,以避免故障进一步扩大,并同时发出报警信息,以便通知人工处理。门机控制系统的核心处理器采用专为电机控制设计的GD32F103VCT6处理器,该处理器自带通用I/O、A/D转换器、脉宽调制(PWM)生成器、RS485通信接口、故障保护以及用于数字测速的捕捉器功能,可极大简化控制电路的设计。
DCU硬件系统由电阻电容、变压器、芯片及智能模块等多种元器件组成,系统中元器件的国产化率达到100%,实现了站台门装备自主化生产制造。系统涉及的电阻、电容均由国内厂家国巨公司生产。开关电源采用反激式开关电源设计,关键部件开关变压器根据设计参数由国内厂家绕制,开关电源主要负责为各个芯片及负载供电。RS485通信电路主要采用纳芯微电子公司的自带隔离RS485集成芯片,以光隔离的方式与PSC进行RS485数据传输。外部输入信号电路主要由光宝科技的16引脚4通道隔离光耦构成,隔离光耦主要负责采集控缆输入信号、电磁锁反馈信号、就地控制盒(LCB)控制信号、端门及应急门信号,并将采集到的信号传送至兆易创新处理器GD32F103VCT中;外部输出信号由隔离光耦及紫光科技的大电流达林顿阵列集成块组成,根据滑动门实时状态实现对门头指示灯及蜂鸣器、端门指示灯、电磁锁线圈的控制输出。直流无刷电机驱动电路主要由奥伦德的快速光耦隔离及士兰微电子的智能功率模块(SPM)组成,主要负责控制直流无刷电机的转速;直流无刷电机电流采样由纳芯微电子的线性光耦及圣邦微电子的精密放大器组成,负责实时采集直流无刷电机的状态电流。霍尔传感器负责实时检测转子位置信号,通过中微爱芯的反相器对采集后的脉冲信号进行整形。差分编码器负责实时检测直流无刷电机的转速,经瑞盟科技的差分线路接收器将差分信号转变为晶体管-晶体管逻辑电平(TTL)信号,TTL信号经过脉冲整形后发送至GD32F103VCT处理器的捕捉器中进行数字测速。在直流无刷电机带动滑动门运行的过程中,处理器实时检测母线电压、电流的运行状态,当检测到母线电压电流超限时,处理器触发故障保护机制、屏蔽PWM产生器并将状态及故障信息上传至PSC监控系统。
4 自主化软件系统设计
门机控制系统软件主要由电机驱动和逻辑控制2部分组成,电机驱动部分主要负责实时采集母线、电机电流、SPM驱动模块的温度及状态,DCU根据逻辑控制发送的运动指令,控制滑动门进行开/关门动作,同时将电机运行状态信息通过RS485通信接口上传至PSC监控系统。同时DCU实时采集电磁锁、应急门、LCB等运行状态,经过处理后,控制电机带动门体运动,并以RS485通信方式将DCU整体运行状态上传至PSC监控系统。总体流程如图4所示。
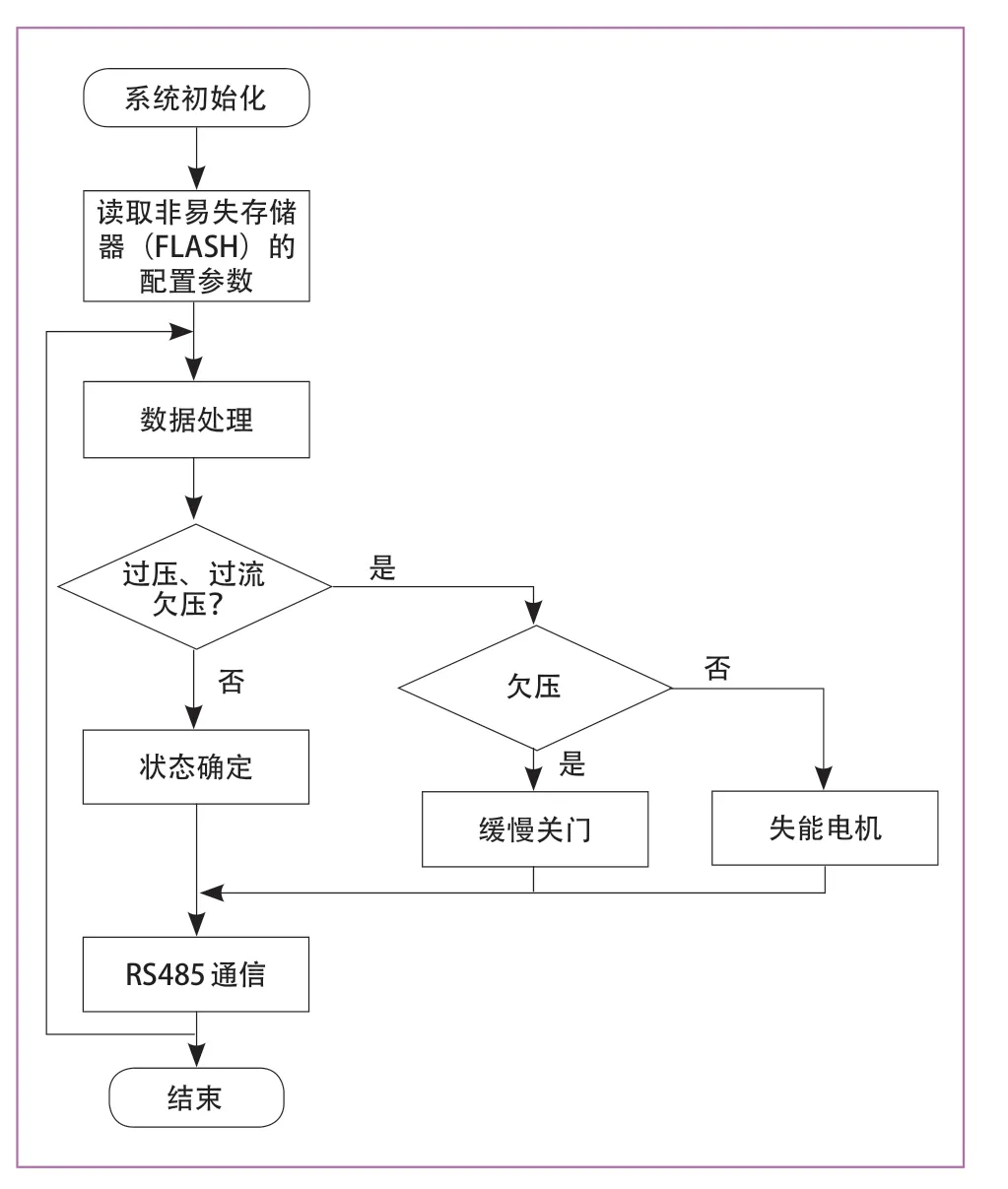
图4 软件系统总体流程图
门机控制系统设置了3个调节器即三闭环控制,分别引入位置负反馈、速度负反馈、电流负反馈用于调节位置、转速和电流。三者之间采用串级连接,位置调节器的输出当作速度调节器的输入,速度调节器的输出当作电流调节器的输入,电流调节器的输出控制SPM电机驱动模块。三闭环从内之外分别是电流环、速度环、位置环。为了获得良好的静态和动态性能,电流环、速度环调节器均采用带限幅作用的比例积分(PI)调节器,位置环采用快速响应的P调节器。控制流程如图5所示。
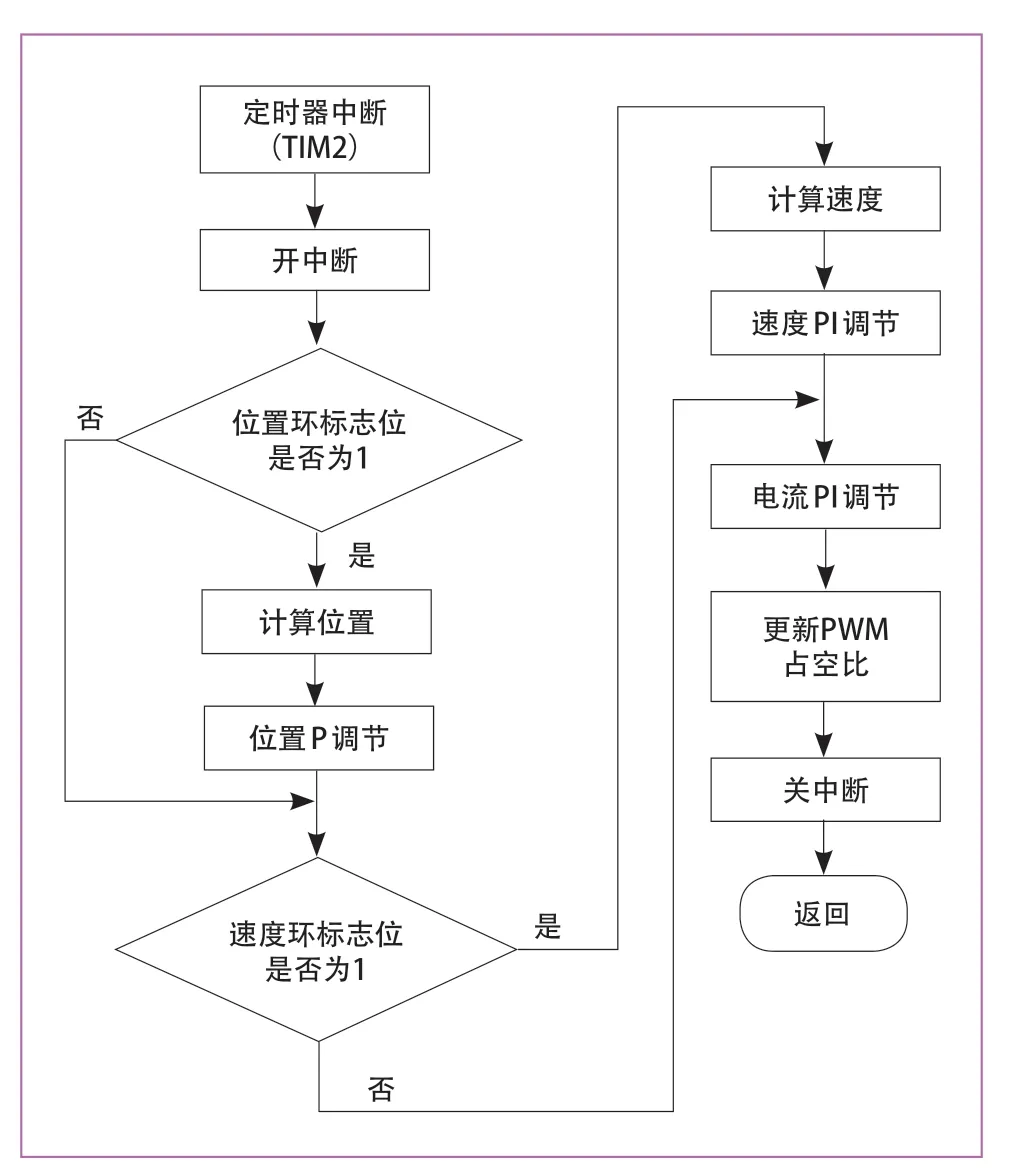
图5 软件系统三闭环控制流程图
站台门运动控制主要由开/关门控制组成。滑动门在开门动作前首先判断滑动门当前所处位置,如果滑动门处在关门到位的位置,系统发出提锁指令并判断电磁锁反馈的提锁信号。如果提锁成功,电机驱动带动滑动门进行开门运动;如果提锁失败,电机驱动发出报警并将报警信息上传至逻辑控制。滑动门关门则是判断门体当前所处位置后,电机驱动直接带动滑动门进行关门动作,滑动门运行至关门到位且电磁锁落锁后关门动作完成。开/关门控制流程如图6所示。

图6 开/关门控制流程图
5 功能验证与性能优化
为验证国产化站台门门机控制系统性能,将自主化DCU放置在京张高铁站台门项目样机上进行运行并用监控软件记录开/关门过程中的运行状态。图7和图8分别为滑动门开门和关门运动曲线。图中蓝线为滑动门实际速度曲线,红线为滑动门目标速度曲线。滑动门在开/关门运动过程中,分别经过启动加速、匀速、减速、停止运行等4个运行状态。从开/关门运动曲线图中可以看出,滑动门在加速和减速段跟踪相对平滑,在状态转换节点上,会出现速度误差超调但在很短时间内又可调至目标速度范围内。运行结果显示,滑动门在开关过程中具有很好的可靠性、鲁棒性,门体动作流畅、系统硬件及软件运行良好无故障。
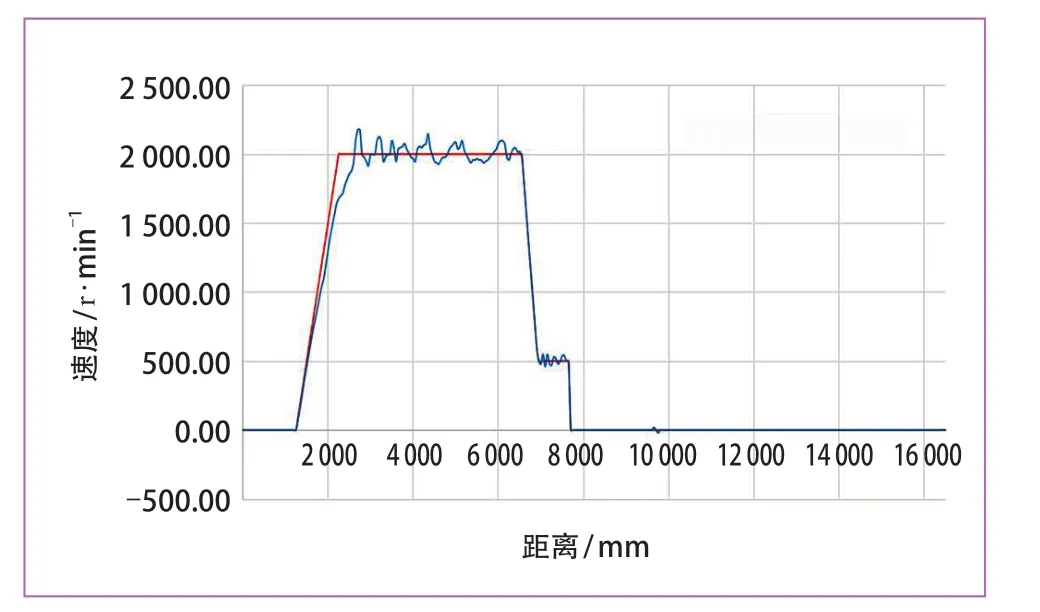
图7 开门速度曲线图
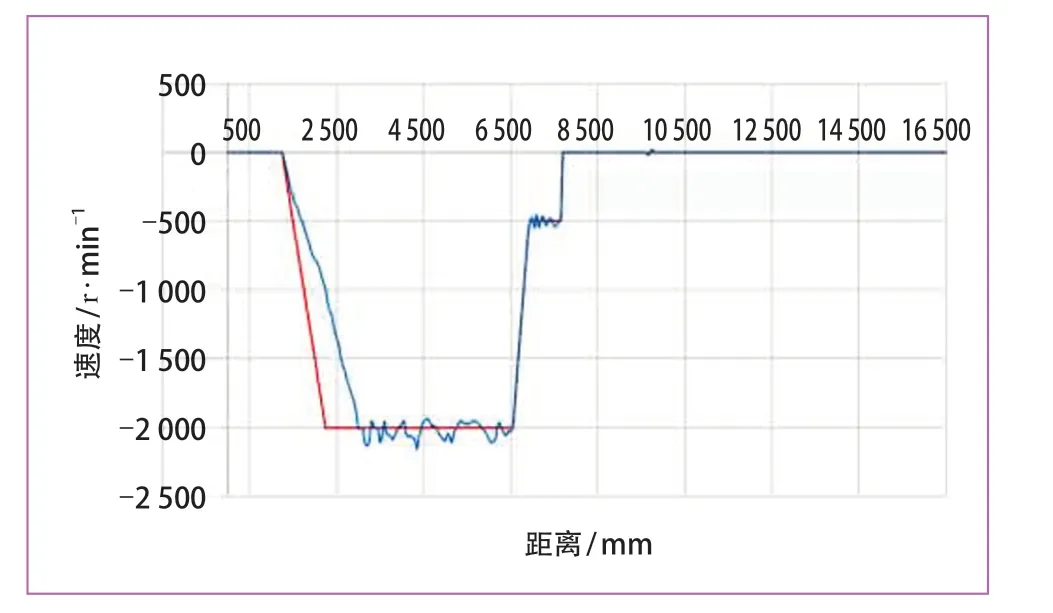
图8 关门速度曲线图
6 结论
本文以站台门门机控制系统的自主化关键技术为基础,论述了门机控制系统的组成,研究了直流无刷电机调速特性、软硬件自主设计及匹配性实验,形成了自主可控的站台门门机控制系统产品,并且结合京张高铁站台门项目样机完成自主化站台门门机控制系统关键技术的功能验证,打破了站台门系统核心部件受制于人的被动局面。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
中国核电(2021年3期)2021-08-13
企业科技与发展(2020年3期)2020-06-30
铁道通信信号(2020年7期)2020-02-06
铁道通信信号(2019年4期)2019-10-10
电子制作(2019年10期)2019-06-17
船海工程(2015年4期)2016-01-05
汽车与驾驶维修(维修版)(2015年2期)2015-07-25
中国铁道科学(2015年5期)2015-06-21
电机与控制应用(2015年7期)2015-03-01
