
基于图像识别的物流车辆车距预警架构研究
2023-09-20 13:01:20张晓玲唐荣芳程荣波
无线互联科技 2023年14期
张晓玲,唐荣芳,程荣波
(广西工业职业技术学院,广西 南宁 530001)
0 引言
在物流行业中,物流车辆是不可或缺的一环。但随着道路交通的不断拥堵和交通事故的不断增加,车辆安全问题越来越受到人们的关注[1]。其中,车辆之间的距离问题尤其重要。合理的车距可以有效避免交通事故的发生,但由于人为、天气等因素,驾驶员并不能始终保证安全距离[2]。近年来,随着计算机视觉和机器学习技术的快速发展,基于图像识别的交通安全系统得到了广泛的应用[3-4]。在车辆追尾事故中,图像识别技术可以通过分析车辆的速度、距离和方向等数据来判断车辆之间的安全距离。这些技术的出现大大提高了车辆安全性和道路交通效率[5-6]。
物流车辆是现代物流体系中不可或缺的一环,但其安全性一直是物流业的瓶颈问题。尤其是在交通拥堵的情况下,车辆之间的距离问题更为严重。因此,本文研究了基于图像识别的物流车辆车距预警架构。具体来说,主要研究基于单发多框检测器(Single Shot MultiBox Detector,SSD)网络的车牌检测定位技术[7-9],利用相似三角形原理实现车距检测,能为物流行业提供一种新的交通安全保障手段。
1 基于图像识别的车距预警总体架构
本架构主要包括车牌检测定位和车距检测两个模块,如图1所示,整体架构流程如下。
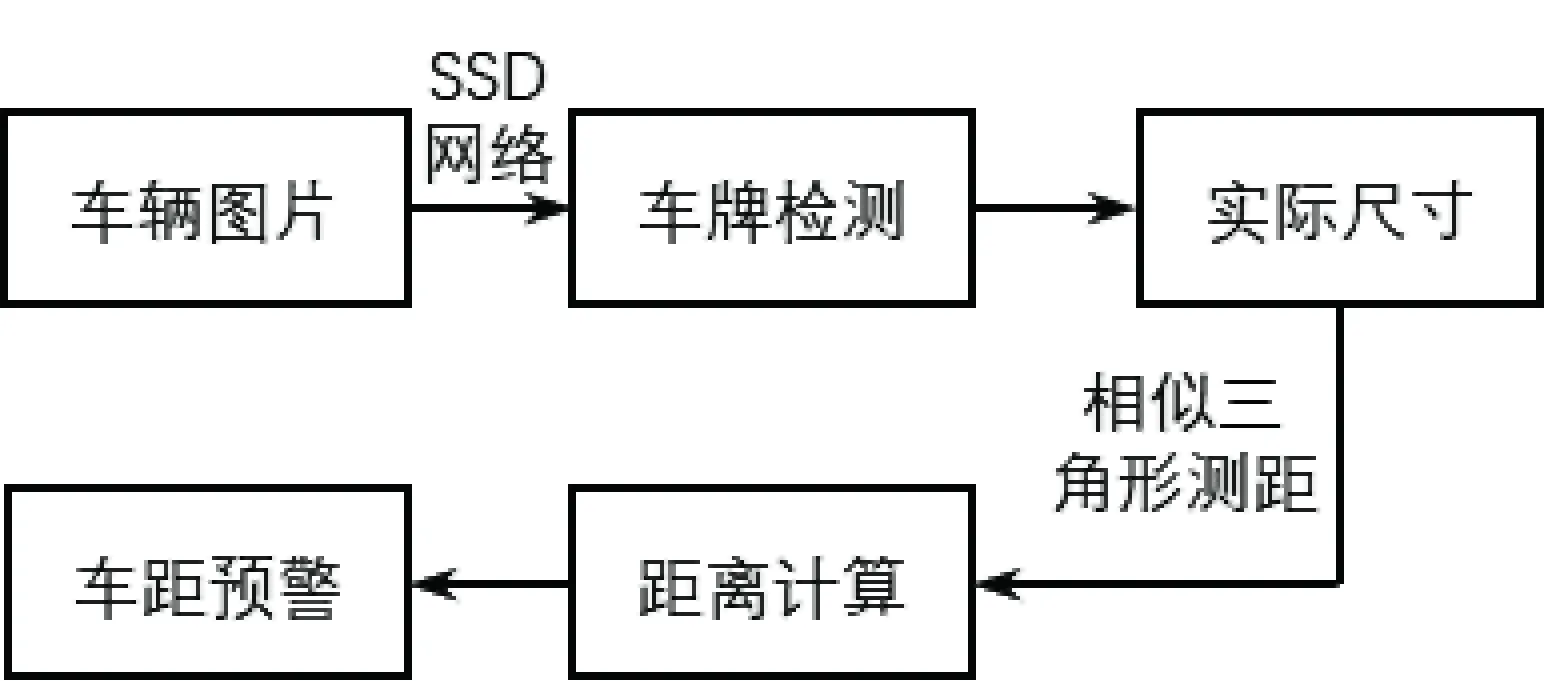
图1 总体架构
(1)输入一张物流车辆图像。
(2)车牌检测定位模块使用SSD网络从图像中提取车牌的位置信息。
(3)根据车牌在图像中的像素尺寸以及车牌的实际尺寸计算出图像中其他物体的实际尺寸。
(4)根据实际尺寸计算出车辆之间的距离。
(5)比较实际距离和安全距离,发出车距预警提示。
2 基于SSD网络的车牌检测定位技术
2.1 SSD网络
SSD网络结构的数据流如图2所示,该方法是一种基于深度学习的目标检测算法。SSD网络是一种高效、准确的目标检测算法,采用多尺度特征提取和锚框机制来实现对不同大小、形状的目标进行检测。同时,该网络还具有可扩展性和灵活性,可以适应不同的数据集和任务需求。
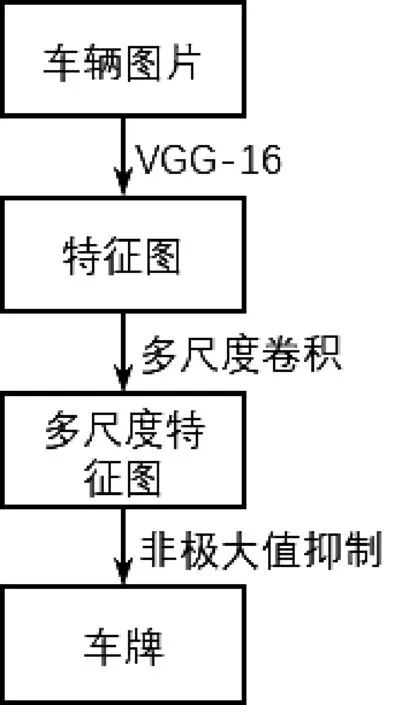
图2 SSD网络结构中的数据流
SSD网络由两部分组成:基础网络和检测网络。其中,本架构的基础网络采用VGG-16经典卷积神经网络作为特征提取器,检测网络则是一个多层卷积网络,用于对特征图进行进一步处理和分类。SSD网络采用了一系列不同尺度的特征图来检测不同大小的物体,这些特征图通过多尺度卷积处理得到。为了适应不同形状的目标,SSD网络使用了多种形状的锚框来检测不同形状的物体。
在SSD网络中,每个特征图的每个位置都有一个预定义的锚框,用于对图像中的目标进行检测。对于每个锚框,SSD网络预测出其所包含目标的类别和位置信息。类别信息通过分类器进行预测,位置信息通过回归器进行预测。SSD网络将每个锚框分别与多个真实标注框进行匹配,通过最小化类别误差和位置误差优化网络参数。最终,SSD网络可以输出一系列预测框,这些框可以覆盖图像中的所有目标。
2.2 车牌检测定位技术
利用SSD网络实现车牌检测定位技术时,需要先构建一个训练数据集,包含车牌图像及其对应的标注框。然后,可以利用已经训练好的SSD网络(如VGG-16)作为基础网络,通过微调网络的参数实现车牌检测定位任务。在微调网络之前,需要将SSD网络的最后一个全连接层替换为一个适当的输出层,该输出层包含分类器和回归器两部分。分类器用于预测车牌与非车牌的类别信息,回归器用于预测车牌的位置信息。接着,将训练数据集输入SSD网络,通过反向传播算法调整网络参数,使网络能够准确地预测车牌的位置和类别信息。完成后,可以使用该网络对新的图像进行车牌检测定位任务。
对于一张新的图像,可以将其输入SSD网络,SSD网络会对图像进行特征提取,并对不同大小的锚框进行预测,输出每个锚框的类别和位置信息。然后,可以通过非极大值抑制(Non-Maximum Suppr-ession,NMS)算法对重叠的预测框进行去重[10],得到最终的车牌位置信息。
3 基于相似三角形的车距检测技术
在得到车牌位置信息后,可以利用相似三角形原理实现车距检测[11]。基于相似三角形原理的车距检测方法是一种简单、直接的方法,可以在车辆跟踪任务中取得很好的效果。其原理简单明了,计算过程易于实现,能够满足实时性需求,并且可以适应不同的摄像头和车辆类型。该方法的基本思想是,在图像中通过车牌位置信息确定目标物体的实际尺寸,通过相似三角形原理计算出物体在图像中的像素尺寸,进而计算出物体与相机的距离该方法原理如图3所示,假设车牌在图像中的像素尺寸为p,车牌的实际尺寸为s,相机与车牌之间的距离为d,则可以根据相似三角形原理得到以下公式:
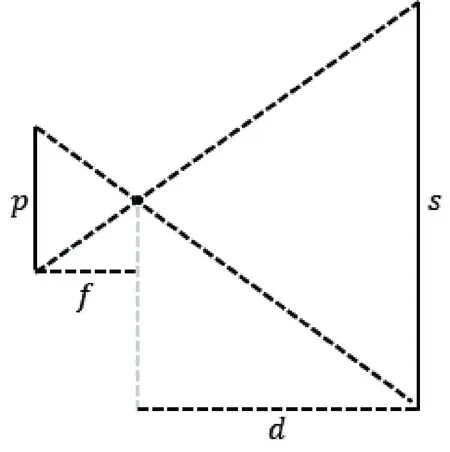
图3 相似三角形测距原理
(1)
其中,f为相机的焦距。由此可以得到:
(2)
因此,可以通过测量车牌在图像中的像素尺寸和已知的相机参数(即焦距)来计算车辆与相机的距离。
为了实现车距预警,需要将车辆与相机之间的距离与安全距离进行比较。假设安全距离为dsafe,则可以通过以下公式计算出当前距离与安全距离的比值:
(3)
当r<1时,表示车辆距离相机太近,需要进行预警。
4 分析与讨论
理论分析表明,该系统具有良好的性能和实用性。
从车牌检测定位技术的角度考虑,该系统采用了基于SSD网络的车牌检测定位技术,通过大量训练数据的学习,可以在不同的场景下获得很好的识别效果。此外,该系统还利用了图像增强技术和多尺度检测技术来提高车牌检测的准确率和鲁棒性。
从车距检测技术的角度考虑,该系统利用了相似三角形原理计算物体在图像中的像素尺寸,进而计算出物体与相机的距离。该方法具有计算简单、精度高、实时性好等优点,能够满足车辆跟踪任务的需求。在实际应用中,通过对系统的实时性和精度进行实验,可以得到该系统的距离测量误差较小,可以满足车辆的距离预警需求。
5 结语
本文主要研究了基于图像识别的物流车辆车距预警架构,实现了车牌检测定位技术和车距检测技术。在车牌检测定位方面,本文采用了基于SSD网络的车牌检测定位技术,该方法具有很好的准确率和鲁棒性。在车距检测方面,本文利用相似三角形原理实现了车距检测,该方法具有计算简单、精度高、实时性好等优点。通过对该系统的实际应用和实验结果的分析,证明了该系统具有很好的实时性、准确性和鲁棒性,可以满足物流车辆跟踪、城市交通管理等领域的需求。
未来,可以考虑进一步优化该系统的车辆距离预警算法,提高预警的准确性和实时性。例如,采用深度学习算法对车辆的距离和速度进行预测,从而提高预警的准确性和实时性。此外,还可以考虑将该系统与其他交通管理系统进行集成,实现全面的城市交通管理。在城市交通管理方面,该系统可以通过实时监测车辆与相机之间的距离,提供实时的道路拥堵情况,从而为城市交通管理提供科学的决策支持。
猜你喜欢
信号处理(2022年11期)2022-12-26 13:22:06
计算机与生活(2022年11期)2022-11-15 16:17:48
计算机工程与科学(2022年8期)2022-08-20 01:39:22
中南民族大学学报(自然科学版)(2022年3期)2022-05-08 03:51:12
汽车实用技术(2022年4期)2022-03-07 03:47:54
电子制作(2019年12期)2019-07-16 08:45:16
莫愁·时代人物(2018年7期)2018-09-12 11:19:18
莫愁(2018年20期)2018-07-19 08:44:52
电子测试(2018年1期)2018-04-18 11:53:56
小猕猴智力画刊(2017年5期)2017-05-25 21:44:09
