
数字图像测量技术及在隧道室内模型试验中的应用
2023-09-19 06:12:34韩兴博冯浩岚王培源陈子明娄智普
同济大学学报(自然科学版) 2023年9期
韩兴博, 冯浩岚, 何 乔, 王培源, 陈子明, 娄智普
(1. 长安大学 公路学院, 陕西 西安 710064;2. 贝尔福-蒙贝利亚技术大学 信息学院, 贝尔福 90000;3. 中铁二十一局集团轨道交通工程有限公司,山东 济南 250000)
隧道模型试验以其相较原位试验的经济性与可重复性,以及相较理论分析及数值计算的客观性与直观性,在岩土隧道工程领域的研究中占据重要地位,是不可或缺的研究手段之一[1]。
隧道模型试验中一般采集的数据包括地表位移、围岩与衬砌的接触压力、衬砌的变形及结构内力等。早期,郭舜年等[2]、顾金财等[3]通过百分表及位移计量测衬砌变形,以及通过观察围岩开裂的宏观现象对不同工况隧道结构的受力特性进行了模型试验研究。后续,学者们也在模型试验的地层顶部增设了多组百分表以观察隧道开挖引起的地表沉降规律。此类衬砌变形、地表沉降等数据,可以通过百分表、位移计等设备接触结构体直接进行观测,获取较为便捷。但是除此类结构体表面的位移外,围岩内部的位移也对隧道开挖后地层影响规律的研究具有重要价值。因此,为了观测岩土体内部的位移,李又云等[4]通过多点位移计监测了隧道模型试验围岩内部位移。这类多点位移测量系统及方法,为获取围岩内部的变形规律提供了条件,但是仍然属于通过少量点的位移来推测整个围岩的变形情况,试验结果分析具有一定的偶然性。此外,该类位移计多为自研,不同研究团队的制作工艺水平会较大程度影响测量结果的准确性[5]。后续,随着光纤测量技术的发展,刘泉声等[6]通过在围岩内部布设光纤,实现围岩变形的监测。但是,不论内置的多点位移计还是光纤测量仪器,其均需将测量元件埋置于土体内部,这些元件不同程度上会影响其周边土体位移的发展,从而一定程度影响试验结果。
随着数字图像测量技术的发展,李元海等[7]提出了采用标点法计算图像的相关性,并开发了相应的软件系统PhotoInfor。Stanier 等[8]通过改良算法实现了粒子图像测速(particle image velocimetry,PIV)技术在岩土变形监测中的应用,并研发了基于MATLAB 的GeoPIV-RG 程序并可开放获取。Blaber 等[9]基于数字图像相关(digital image correlation, DIC)技术,也研发了可开放获取的MATLAB程序Ncorr。上述技术及实践对隧道模型试验围岩衬砌等的位移及裂缝发展的非接触测量提供了强力支撑。因此,本研究拟首先从DIC、PIV、数字照相变形量测(digital photogrammetry for deformation measurement,DPDM)三类技术出发,对数字图像测量方法在隧道模型试验中的应用现状及技术发展进行梳理,并介绍各类测量方法的基本原理。其后通过黄土盾构隧道的掘进模拟试验,对数字图像测量技术在隧道模型试验中的应用进行示范。研究以期对隧道模型试验的围岩及结构变形量测提供思路及具体方法。
1 数字图像测量方法应用概述
1.1 数字图像相关DIC
DIC 技术较早被应用于固体力学中,测试刚性材料(如钢和铝)的应变。岩土工程研究对象相对刚性材料,试验中的应变明显更大(应变范围在0.1 %~1 %)且显著高于与该技术的典型误差幅度。因此,在20 世纪90 年代末,研究人员意识到DIC 特别适用于岩土工程领域,开始在地层变形的分析中广泛应用。
在公路隧道方面,基于缩尺离心试验,Idinger等[10]对不同围岩压力下隧道掌子面塌方的破坏机理进行了分析,进一步利用DIC 分析地面变形规律并将分析结果与理论模型进行了对比。Huang等[11]基于物理模型试验,采用DIC 技术分析了隧道开挖后围岩的变形情况,研究了断层带附近隧道围岩的破坏机理。在地铁隧道方面,Sun 等[12]采用透明砂和DIC技术对盾构机掘进时的土体变形规律进行了实验研究,研究发现土体的沉降槽类似于高斯曲线。李堂勇[13]依托成都地铁某运营区间,通过模型试验及DIC 等方法对浅埋地铁隧道抗震性能进行了研究。
此外,针对许多岩土破坏过程,如浅基础的塑性破坏或山体滑坡涉及的类似颗粒流运动,也可以利用图像相关技术解决流体力学领域的相关问题[14]。
1.2 粒子图像测速PIV
相较DIC 技术,PIV 技术不仅可以分析不同工况下的岩土体位移场,还可以针对盾构隧道壁后注浆等流体在空隙中的填充情况和扩散范围进行分析。
在分析材料试件的基本性能方面,王文学等[15]对试件开展压剪试验,探究了裂隙张开度对试件强度、变形及破坏的影响。而在桩土变形及隧道施工方面的分析中,曹兆虎等[16]对沉桩过程中桩周土体的位移场进行测量,并研究了不同因素对桩周土体位移场的影响规律。方焘等[17]开展了不同埋深盾构隧道施工时砂土地层的变形规律模型试验,得出了不同埋深情况下地层的变形规律。
此外,在土动力学以及流体力学相关的研究中,Cilingir等[18]利用PIV测量了隧道周围的加速度和土压力,发现最大加速度对隧道承受的最大荷载有重要影响。李文涛[19]利用PIV 测试,对盾构隧道壁后注浆控制地层沉降的效果及注浆浆液的填充情况和扩散范围进行了研究。
1.3 数字照相变形监测DPDM
DIC和PIV作为主流的非接触测量方法,在此两者基础上,学者们对非接触测量方法进行了拓展,形成了更多元化的测量手段。数字照相量测技术[20]主要通过单反相机、电荷耦合器件(CCD)摄像机或者其他拍照设备当作图像采集的手段,从而得到需要观测物体的数字图片,进一步利用数字图像处理以及分析软件对所量测的目标的变化趋势进行分析与处理[21]。
其中,李元海团队研发的DPDM软件[20]最具代表性,DPDM软件包括2个图像分析程序(PhotoTarget、PhotoInfor)和1个后处理程序PostViewer。用户在应用该技术时只需要采集数字照片并准备一个控制点文件,系统便可完成剩余分析处理工作。基于此,李元海等[22]对压缩试验时的混凝土试件进行观察,得到了其表面位移、应变等发展、演变过程。
2 测量方法的原理
2.1 二维图像测量
2.1.1 基本原理
(1)数字图像相关DIC
数字图像相关又称数字散斑相关法,其基本原理是在变形前对图像中的感兴趣区域进行网格划分,并将每个子区域视为刚体运动。然后,通过预定义的有关函数计算每个子区域,在变形后的图像中找到对应的子区域,从而确定该区域的位移。通过计算所有子区域,得到整个场的变形信息。该方法具有全场测量、抗干扰能力强、测量精度高的优点。该方法中的局部DIC(是传统DIC 的一种,与全局DIC不同[23])分析方法的原理如图1所示。
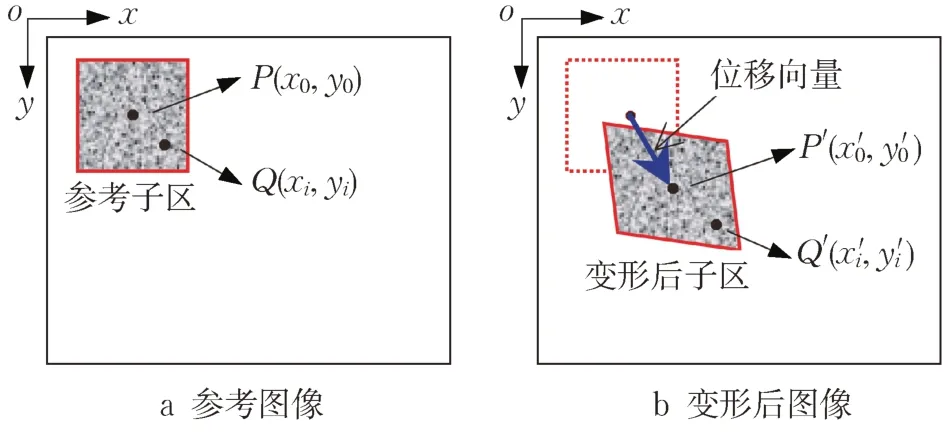
图1 DIC变形子区示意图[24]Fig. 1 Schematic of DIC deformation sub-region[24]
图1 中,P(x0,y0)为参考子区的中心坐标,Q(x0,y0) 为图像子区中任意一点的坐标。而P′(x0′,y0′)和Q′(x0′,y0′)分别为变形后,子区中心P(x0,y0)和任意一点Q(x0,y0)对应的坐标。针对研究对象依次拍摄的图片进行相关性分析,得到物体的相应位移,其核心思想是将计算区域离散化为独立的图像子区,并在每个子区内分别搜索目标位置。在变形前后的图像中,应用相关系数公式计算它们之间的相关性[24]。在搜索区域内,当相关系数达到峰值时,该位置即为目标子区的位置。目标子区的定位过程包括整像素搜索和亚像素匹配,实际上使用了优化方法。
(2)粒子图像测速PIV
通常将跟随性好且反光性强的示踪粒子大量地释放到所测流场内,粒子会跟随着流体运动并保持一致的运动状态,此时即可以示踪粒子的运动速度反映出同一位置流体的运动速度,激光器发射出来的光束经柱面透镜散射后用来照亮测试流场中的示踪粒子,同时利用垂直于测试流场的CCD相机进行不间断的两次曝光,将同一区域不同时刻的粒子运动图像记录在PIV底片上[25]。
图像处理技术能够针对较大测试区域难以准确确定同一粒子运动轨迹的问题将原本较大的区域划分成若干个称为查问区的小区域。再利用统计技术得出每个查问区粒子在流场中的位移大小和方向,再结合跨帧时间Δt 计算粒子的速度矢量,如图2 所示。通过统计每个查问区的粒子,得到每个查问区的速度矢量,再对所有的查问区进行处理,最终统计出整个测试区域的速度矢量场。
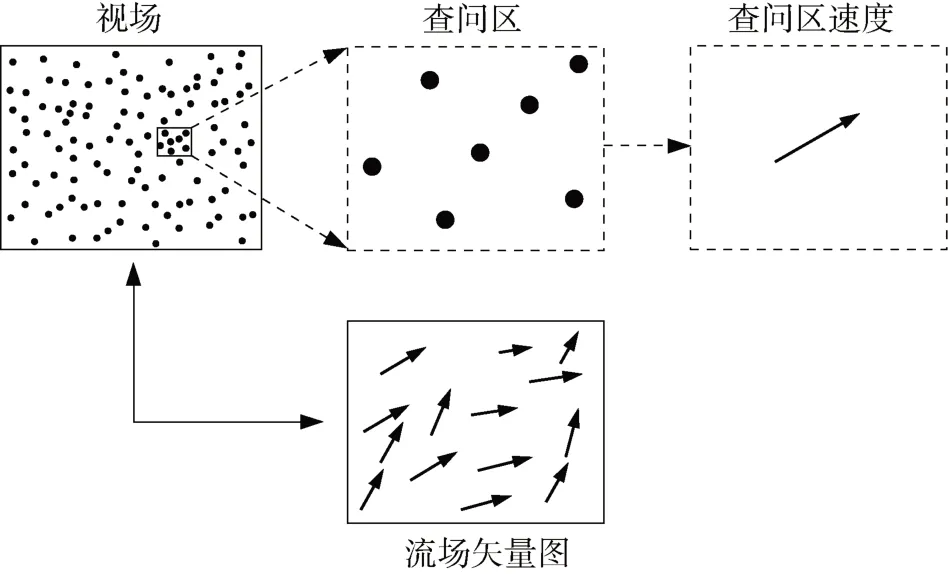
图2 PIV原理图[25]Fig. 2 Schematic diagram of PIV[25]
在二维平面上,选取任一运动的示踪粒子,时间间隔为Δt,则它在x方向和y方向上的位移均与时间t存在函数关系,即:
式中:vx、vy分别为x、y方向上的瞬时速度;分别为x、y方向上的平均速度;Δt为两次测量的时间间隔。
当测量间隔满足一定条件时,平均速度就能反映出瞬时速度。PIV测速即是根据示踪粒子的瞬时平均速度来反映出整个二维流场。
(3)数字照相变形量测(DPDM)
DPDM 软件系统中,根据观测目标上是否使用人工量测标志点,将DPDM 分为标点法和无标点法,前者因不受观测区域变形限制,图像处理速度较快等优点适用于模型试验、现场观测等大范围变形观测场景,但其测点布置操作较复杂且数量受限;后者因测点布置灵活且无需人工物理量测适用于小范围观测,但其缺点是量测精度对观测区变形突变性和环境光线变化敏感且图像分析时间较长[20]。其中,图像分析程序PhotoTarget专门用于标点法数字照片的处理分析。而PhotoInfor 既可以用于无标点法图像处理,也可以处理标点法图像。
进一步,针对岩土类材料局部化变形特性,提出了旋转加平动的图像相关分析三步搜索算法,然后说明了基于等参四边形单元的坐标转换与变形解释方法。DPDM 软件系统可为砂土、黏土、钢筋混凝土、岩石等岩土工程常用材料的数字照相变形全程观测、演化过程以及局部分析提供有力支持。
2.1.2 测量方法原理的差异
DIC、DPDM 等非接触测量方法虽然在基础数据的采用等方面存在差异,但基本原理均以照片上点的相关性判断各点的位移,并进一步分析观察区域内的位移。图像相关技术在应用于实验流体力学时发生了很大变化。如果两幅图像是在激光照射流体流动平面上的已知时间间隔内拍摄的,则图像分析可以用来测量流体中流动的大小和方向。在流体力学应用中,因为该技术被用来测量某种粒子的速度,基于DIC 原理的图像相关技术通常也被称为PIV。
DIC 和DPDM 使用场景更偏向于室内试验道路、桥梁、隧道、基础、河坝、钢结构、钢混结构等土建结构的变形监测中。而PIV 被广泛运用于浆液[19]、泥石流[26]、喷泉[27]等流体运动的研究中。
2.2 三维图像测量
针对二维数字照相量测方法在透明岩体内部变形破裂观测方面存在的不足,林志斌等[28]通过研究近景摄影测量相关算法开发三维数字照相量测技术,该技术采用多台图像采集设备(数码相机、摄像机等)观测目标,然后利用三维数字图像的相关算法解算观测目标上各待测点的三维变形,适用范围广泛。模型试验中该方法的量测求解过程大致为:
① 在试验开始前,布置至少8 个已知空间坐标的控制点于观测目标周围,然后使用2台或2台以上的数码相机同时拍摄观测目标及设置的控制点;
② 联立每台数码相机的三维坐标模型方程,如式(3),求解得到各相机的6 个畸变参数(k1,k2,p1,p2,s1,s2)、4 个内方位元素(u0,ν0,cx,cy)与6个外方位元素(φ,ω,κ,X0,Y0,Z0);
式中:u和ν为控制点在数字图像上的像素坐标;cy=f dy和cx=f dx分别表示相机在纵轴与横轴上的聚焦程度;Δu 和Δν 为像素点的畸变值,由式(4)求解;u0和ν0为像平面坐标原点(像主点)在数字图像上的坐标;X0,Y0,Z0表示相机光心在三维空间中的坐标;Xw,Yw,Zw为控制点的三维空间坐标;r11、r12、……、r33为相机旋转矩阵R中的9个系数,由相机3个独立的姿态角φ、ω、κ构成。
式中:k1、k2、p1、p2、s1、s2分别表示相机的径向、离心和薄棱镜畸变系数;r 为像素点与像主点间距,r=
③ 保持数码相机静止,开始试验并控制各台相机在试验不同时间节点同时对模型进行拍摄;
④ 根据步骤②中求出的畸变参数、内外方位元素及不同时刻观测目标在各台数码相机中的图像坐标,求得观测目标上各待测点的三维空间坐标;
⑤ 将所求的三维坐标值与初始状态下相应测点的坐标值相减,得到不同时刻各测点的变形值。
事实上,上述求解思路在近景摄影测量中一般被称为“直接线性变化法”,其求解精度往往相对较低。而基于“直接线性变换法”的“光束平差法”精度更高,该方法在平差计算时加入各待测点图像坐标,联立形成庞大的方程组,最终一次性求解得到所有相机的参数及各待测点的三维空间坐标。
基于直接线性变换法,结合光束平差法,林志斌等[28]采用DELPHI 结合MATLAB 开发了三维数字照相量测软件系统Photogram_3D,该方法适用于以透明岩体为相似材料的相关室内试验。
3 DIC在室内盾构隧道施工模型试验中的应用
体之间形成盾尾间隙,对围岩造成一定扰动。针对黄土地层盾构隧道施工时的围岩变形特性及围岩压力计算模型,结合第1节关于非接触测量方法在岩土工程、隧道工程等诸多领域应用广泛的特点,本文以黄土地层盾构掘进的室内模型试验为案例,对数字图像测量方法在模型试验中的应用过程进行具体介绍,并对试验结果进行分析。
在隧道掘进试验前,首先对基于PIV 的GeoPIV-RG程序以及基于DIC的Nocrr程序进行适用性验证。在试验箱中添加本次模型试验材料,通过顶部施加荷载,观察荷载作用过程中土体颗粒的位移情况。如图3所示,发现当土体颗粒较为细时,土体颗粒A 及掺入染色剂增加颗粒辨识度的土体B,采用GeoPIV-RG 均无法成功分析。但当采用较粗颗粒的土体C 时,分析可正常进行。相对PIV 分析手段,DIC 对均一的土体A 可以成功分析。因此后续试验使用DIC进行位移分析。
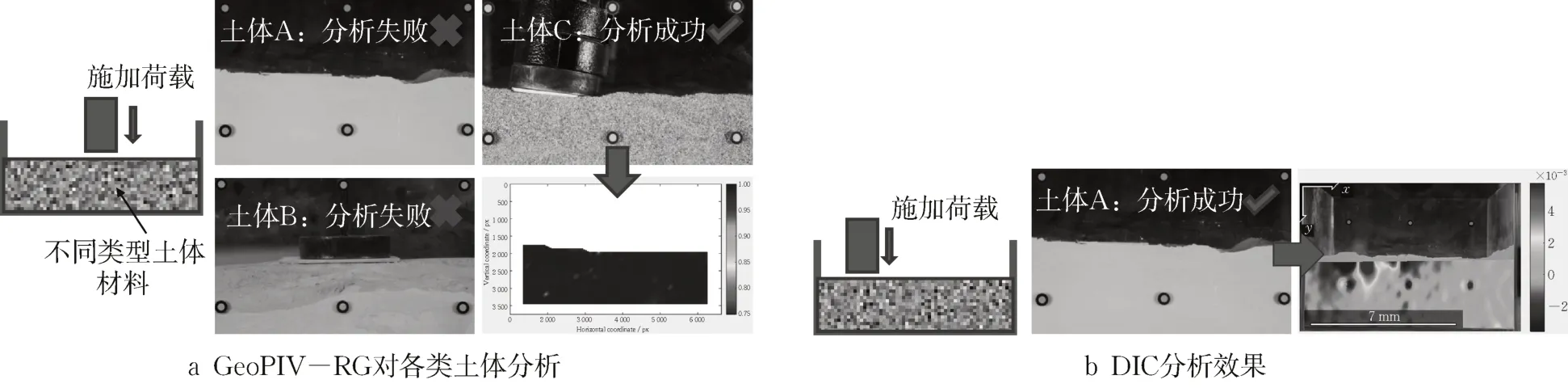
图3 不同算法分析结果对比Fig. 3 Comparison of analysis results of different algorithms
盾构隧道施工过程中,管片从盾尾脱出后,与土
3.1 试验系统
本试验的整体布置如图4 所示,模拟装置包括围岩模拟装置(模型箱及相似土等)、掘进装置(伺服转动系统、伺服推进系统、导轨、反力支撑架、刀盘和盾壳等)、支护装置(管片等)。此外,图像采集设备包括:模型箱两侧的补光灯、盾构掘进入口正断面的补光灯、3 台高清拍照设备(2 台侧面+1 台正面)。补光灯的光色应与相机的焦距、曝光时间相协调,共同保证图片的清晰度,以便于土体位移分析的准确性。
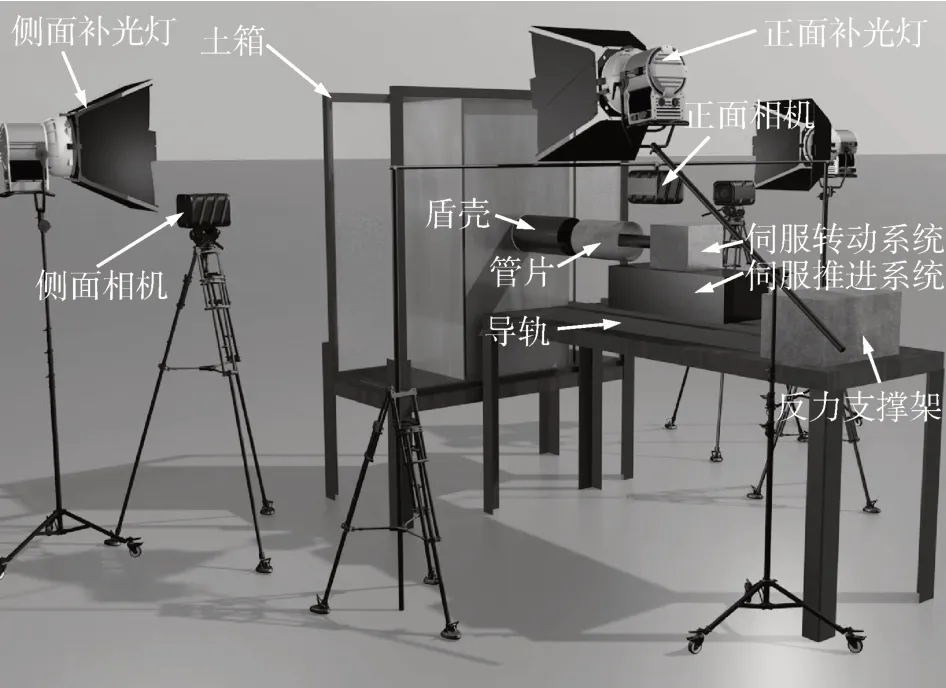
图4 模型试验C4D效果图Fig. 4 C4D effect of model test
结合目前西安地铁盾构隧道管片外径6.2 m的特点和边界效应,所用管片模型外径124 mm,试验模型箱长1 156 mm、宽500 mm、高1 000 mm。由于有机玻璃易刮花,重复使用率较低,且刮花会导致图像分析的结果误差较大。因此,模型箱前后均使用8 mm 厚的超白透明钢化玻璃便于观察围岩变形现象,如图5所示。

图5 模型试验箱(单位: mm)Fig. 5 Chamber of model test (unit: mm)
以西安地铁某区间为依托工程,依托盾构机图纸,对刀盘及盾壳进行简化并制作,如图6所示。其中,盾构模型掘进时,保证盾构刀盘以一定线速度推进的同时以一定的角速度转动。由于现场的盾构推进速度为40~60 mm·min-1,刀盘转速为1.50~1.60 r·min-1。因此,设定模型推进速度为0.02 mm·s-1,故掘进一环需25 min,刀盘转动速度为1.50 r·min-1。
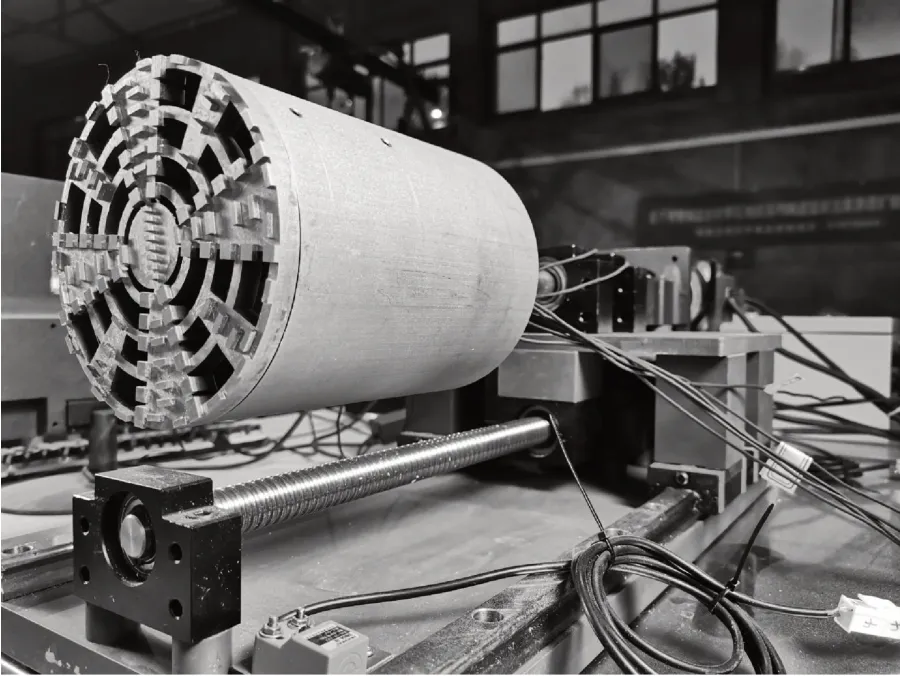
图6 盾构机模型Fig. 6 Model of shield machine
试验期间的主要监测项目为盾构掘进时的进洞口横断面土体变形情况,运用DIC 技术对相机拍摄的土体变形图片进行处理,得到盾构掘进时的土体位移规律,具体流程如图7所示。

图7 图像分析流程Fig. 7 Image analysis process
3.2 2D边界条件下盾构掘进土体变形情况
盾构掘进(图6)时,距离隧道轴心不同距离边界条件下的土体变形规律相似。本文选择距离管片轴心2 倍管片外径(2 D)条件下的土体变形规律进行分析,对盾构掘进到8 环距离时的土体水平和竖向位移进行分析。其中,x和y的正方向分别为向右和向下,如图1所示。此外,对室内模型试验的尺寸进行几何相似(相似比为50),使之与实际工程相联系。
3.2.1 进洞口横断面土体水平位移
盾构掘进时进洞口横断面土体水平位移如图8所示,虽然对土体拍摄的范围较广,但试验发现低含水率黄土的自稳性较好,只有盾构隧道上方的部分土体变形较大。
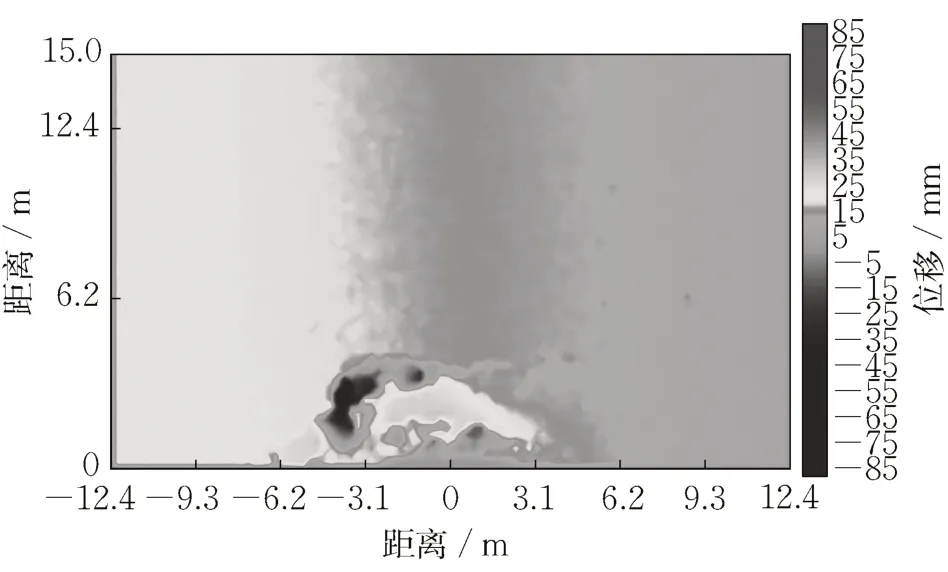
图8 盾构掘进8环时进洞口横断面土体水平位移Fig. 8 Horizontal displacement of soil in cross-section of entrance at a shield tunneling of eight rings
由图8可知,低含水率黄土地层中盾构掘进8环管片距离时,隧道两侧围岩的扰动范围在盾构掘进中轴线两侧0.75 D左右。盾构掘进时,水平位移存在竖直向的等高线,土体沿水平向呈现整体移动的规律;且土体整体呈现右移现象,这与盾构机顺时针转动掘进密不可分。
3.2.2 进洞口横断面土体竖向位移
盾构掘进时进洞口横断面土体竖向位移如图9所示。
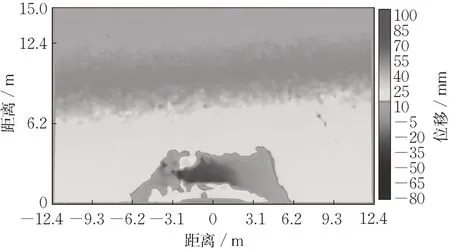
图9 盾构掘进8环时进洞口横断面土体竖向位移Fig. 9 Vertical displacement of soil in the cross section of entrance at a shield tunneling of 8 rings
由图9可知,低含水率黄土地层中盾构掘进至8环管片距离时,隧道两侧围岩扰动范围在盾构掘进中轴线1 D 左右。与水平位移相似,竖向位移存在水平向的等高线,且大范围土体发生了整体向下的位移。此外,与盾构隧道紧密相连的上方小部分土体下移,发生松动塌落,而上方一部分土体隆起,在盾构机掘进时土体随盾构机转动掘进发生顺时针方向的偏转,土体出现隆起、抬升现象。
4 结论
本文重点介绍了二维数字图像测量方法在隧道模型试验中的应用现状、技术发展和基本原理。并对三维测量方法的原理及在隧道模型试验中的应用潜力进行分析。最后,通过黄土地层盾构隧道的掘进模型试验,对数字图像测量技术在隧道模型试验中的应用进行示范。主要得出如下结论:
(1)DIC、DPDM等非接触测量方法的基本原理均以照片上点的相关性判断各点的位移,并进一步分析观察区域内的位移。该方法的使用场景更偏向于室内试验隧(巷)道、基础、边坡、大坝、路面、桥梁、钢筋混凝土结构、钢结构等结构的变形监测。
(2)PIV 分析中两幅图像是在激光照射流体流动平面上的已知时间间隔内拍摄的,图像分析可以用来测量流体中流动的大小和方向,该方法被广泛运用于浆液、泥石流、喷泉等流体运动的研究中。
(3)通过开展黄土地层盾构隧道室内模型试验发现,低含水率黄土地层盾构掘进8环管片距离时,围岩的扰动范围为盾构掘进中轴线两侧1 D左右和盾构上方1 D范围内。
作者贡献声明:
韩兴博:论文初稿,指导论文思路和框图,校核论文。
冯浩岚:室内试验,试验结果分析,绘图和修改论文。
何乔:调研室内试验的相关资料,DIC软件调试。
王培源:补充室内试验的相关资料。
陈子明:调研及参与论文的修改。
娄智普:参与论文的修改。
猜你喜欢
航空发动机(2020年3期)2020-07-24 09:03:26
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26 06:04:34
西南交通大学学报(2016年6期)2016-05-04 04:13:03
中国房地产业(2016年9期)2016-03-01 01:26:36
工程建设与设计(2016年4期)2016-02-27 10:51:09
池州学院学报(2015年3期)2016-01-05 01:13:17
采矿与岩层控制工程学报(2015年3期)2015-12-16 19:20:42
浙江大学学报(工学版)(2015年7期)2015-03-01 01:18:55
中国质量与标准导报(2014年7期)2014-02-28 22:24:36
机械与电子(2014年1期)2014-02-28 02:07:31
