
智能网联汽车主动避撞技术的研究现状与趋势
2023-09-19 07:54:47陈雷程凤军
汽车电器 2023年9期
陈雷 程凤军

【摘 要】汽车能否成功避撞直接影响其行驶的安全性与稳定性,因而汽车避撞技术的研究越来越重要。通过时间序列分析和归纳研究,从"优化控制策略、设计安全距离模型、行车信息感知与处理、车辆动力学、差异化预警、优化算法"等方面分析智能网联汽车主动避撞技术的研究现状,进而预测其未来研究趋势是"算法逐步优化、深度逐步加大、范围逐步拓展、四化程度逐步提高",最后认为该领域的研究应综合多种算法或综合多个角度以满足现实需求。
【关键词】智能网联汽车;主动避撞技术;现状;趋势
中图分类号:U463.6 文献标志码:A 文章编号:1003-8639( 2023 )09-0003-05
Research Status and Trend of Intelligent Connected Vehicle Active Collision Avoidance Technology
CHEN Lei,CHENG Fengjun
(Changzhou Vocational Institute of Industry Technology,Changzhou 213164,China)
【Abstract】Whether a vehicle can successfully avoid collision directly affects its driving safety and stability,so the research of vehicle collision avoidance technology is more and more important. Through time series analysis and induction study,the current situation of Intelligent Connected Vehicle Active Collision Avoidance Technology was analyzed from the aspects of "optimal control strategy,design of safe distance model,driving information perception and processing,vehicle dynamics,differentiated early warning,optimization algorithm". Furthermore,the future research trend is predicted to be "gradual optimization of algorithm,gradual increase of depth,gradual expansion of scope and gradual improvement of the four modernizations". Finally,the author believes that the research in this field should integrate a variety of algorithms or perspectives to meet the practical needs.
【Key words】intelligent connected vehicle;active collision avoidance technology;current situation;trend
作者简介
陈雷(1989—),男,讲师,硕士,研究方向为智能网联汽车技术;程凤军(1975—),男,高级工程师,博士,研究方向为新材料及新能源。
主动避撞技术是智能网联汽车智能驾驶的关键技术,其离不开“运动规划与障碍物识别”等技术或方法的支持,其对降低交通事故发生率、提高汽车行驶安全性与稳定性具有重要意义。当前关于智能网联汽车主动避撞技术的研究,主要分为“优化控制策略、设计安全距离模型、行车信息感知与处理、车辆动力学、差异化预警、优化算法”等方向,内容多且条目繁杂,很少有文献将研究内容进行归纳、分析与总结。本文将解决上述问题,系统地分析智能网联汽车主动避撞技术的研究现状,并预测其研究趋势,以期为该领域研究人员提供直观的参考依据和继续研究的基礎价值。
1 概述
1)主动避撞系统(也称自动避撞系统)是智能网联汽车的一部分,其主要用途是“提前发现与本车有碰撞可能的障碍物(如车辆、行人等),必要时能使汽车自动制动或做出避让动作”。目前汽车主动避撞系统主要分为3种:一是车辆主动避撞预警系统,如前向碰撞预警、车道偏离预警等;二是车辆辅助驾驶系统,如自适应巡航系统、自动紧急制动系统、预碰撞系统等;三是复合交通自动驾驶系统,如交通拥堵引导,高速公路引导等均能够在城市或高速拥堵道路实现自动驾驶[1]。智能网联汽车主动避撞技术是基于主动避撞系统进行开发,也称为主动避撞系统技术。
2)运动规划模块是智能网联汽车车载系统的核心组成部分,也是主动避撞系统不可缺少的部分。运动规划方法可分为路径规划、路线规划、动作规划和轨迹规划[2]。路径规划是基于行车安全性,采集环境多源信息,不断探索起点到终点所有可行路径,以确定最优路径。轨迹规划是在确定已知可能路径的基础上,结合汽车实时的状态和道路交通信息,规划出一条包含“汽车实时空间位置-汽车实时车速”对应关系的关系式。
3)汽车障碍物识别技术是判断车身周围一定范围内存在的障碍物大小、距离等信息,以避免发生碰撞的一种技术,显然该项技术可为汽车主动避撞技术提供基础支撑。当前为检测与识别障碍物,多种传感器被应用于智能网联汽车,如激光雷达、超声波雷达、毫米波雷达、红外雷达等。随着科技的进步,障碍物检测与识别算法的鲁棒性和实时性逐渐增强。
2 智能网联汽车主动避撞技术的研究现状
2.1 优化控制策略
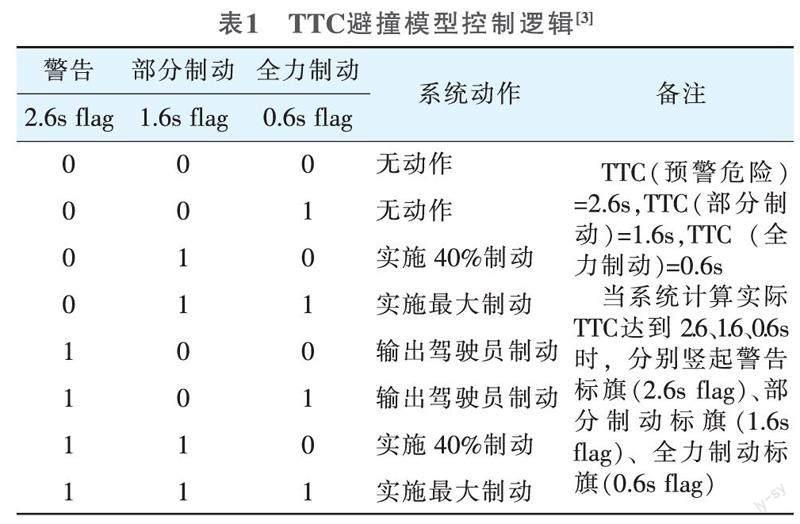
当前国内外学术界关于主动避撞控制策略的研究主要围绕“纵向避撞控制策略、制动与转向协调避撞控制策略”等展开。以前者为例,智能网联汽车主动避撞系统通过雷达等环境感知设备获取障碍物的速度、大小、与本车距离等信息(其主要针对汽车行驶纵向上的障碍物),判断本车与障碍物发生碰撞的可能,然后采取制动或避让措施,如有研究认为“合理的避撞控制策略应该既能达到安全避撞的需求,又不对驾驶员的正常行驶造成干扰”[3],其避撞模型控制逻辑如表1所示。以后者为例,有研究提出一种采用非线性模型预测控制的转向和制动同时进行的避撞策略,其通过对车轮转向角度和横向加速度设定约束条件,提高了转向避撞的安全稳定性[4]。
2.2 设计安全距离模型
安全距离模型设计的合理与否直接影响车辆避撞的安全性[5]。目前常用的4种安全距离模型是固定安全距离模型、基于制动过程安全距离模型、基于车头时距安全距离模型、驾驶员预瞄安全距离模型。第1种模型的实质是“当实际车间距离小于设定的固定值时,系统会产生报警信息”,其对行驶环境的适应能力较差;第2种模型是从空间量化的角度出发,判断车辆发生碰撞的可能性,该模型的优点是所确定的安全距离可变化,但未考虑驾驶员的主观感受;第3种模型是通过车辆距离碰撞的剩余时间来判断紧急程度;第4种模型充分考虑了驾驶员的主观感受,可满足不同驾驶员的需求。
有研究设计了一种利用单个控制回路的控制方案,通过引入与前、后车辆之间的相对距离和前车速度相对应的额外状态变量实现车辆速度和距离的跟踪[6],但该种控制方案的稳定性较差。为此,提出了基于车辆跟随策略的安全距离控制模型,增强了汽车跟随系统的稳定性[7]。进一步地,将传统安全距离模型和基于车头时距的安全距离模型优缺点互补,建立了一种高低速安全距离模型进而搭建的自动紧急制动(AEB)系统控制算法模型[8]。更进一步地,建立智能汽车自动紧急避撞的质点模型和考虑车辆外形尺寸及安全约束条件的避撞模型,并对两种模型所需的最小纵向安全距离进行仿真计算和对比分析[9]。此外,针对城市工况,提出了一种最小安全车距控制模型和避撞算法,针对前方车辆行驶状态和不同类型车辆制动性能差异,给出相应的安全距离估算模型[10]。
2.3 行车信息感知与处理
行车信息感知是汽车智能驾驶的关键技术之一,其能为汽车行驶过程中提供道路边界、车辆周围障碍物的位置、速度、运动方向等信息[11]。当前有关行车信息感知的研究主要集中于车距测量、车速测量、路面信息获取,而行车信息处理主要通过卡尔曼滤波技术。
2.3.1 车距测量
当前车间距离测量方法主要有两种,即基于机器视觉[12]和基于车载雷达系统。基于机器视觉车间距离测量方法的优点是探测环境范围宽、获取目标信息完整,缺点是实时性差、运算量大、准确度低。有研究通过基于机器视觉的车间距离测量方法实现了图像中车辆目标的识别[13],进一步地,通过该方法检测车辆的尾部来判断车辆目标[14]。相比机器视觉测距,基于车载雷达系统车间距离测量方法的优点是结构简单、发射功率低、分辨率与灵敏度高、抗干扰能力强;缺点是装置清洁度要求高、成本高。有研究通过毫米波雷达相控阵的方法来对车辆目标进行检测,模拟几种典型交通情况下毫米波雷達的应用[15]。进一步地,提出了一种基于毫米波雷达探测的汽车自动避障控制系统,用雷达探测方法进行障碍物方位信息估计,最终实现汽车的自动避障[16]。
2.3.2 车速测量
当前车速的获取主要有直接法和间接法。直接法虽精度高,但高昂的成本限制其发展与应用,目前汽车主要是通过间接法来测量车速。如线性卡尔曼滤波法主要是针对低自由度汽车模型进行车速估计;非线性卡尔曼滤波法主要是针对高自由度汽车模型进行车速估计。
2.3.3 路面信息获取
路面信息获取主要是获取路面附着系数。当前对路面附着系数的估计,主要有基于原因法和基于结果法,前者无需考虑车辆自身的因素,只需利用传感器直接识别路面参数,后者是基于路面条件变化,以整车响应来估算摩擦系数的大小。有研究采用带有加速度计和全球定位系统传感器来测量在品质差的路面上行驶对汽车的影响[17],进一步地,通过比例-积分-微分(PID)控制有效地辨识出路面的附着系数[18]。
2.3.4 行车信息处理
因行车感知的信息中通常含有一定的噪声,需进行处理才能准确获取目标信息,行车信息处理技术应运而生。国内外学者主要通过卡尔曼滤波技术对行车信息进行处理,如通过设计分析n维卡尔曼滤波方程和控制卡尔曼算法去除测量噪声[19],进一步地,为提高噪声处理能力,采用改进的交互式卡尔曼滤波算法对雷达测量产生的噪声信号进行处理[20]。
2.4 车辆动力学
智能网联汽车主动避撞技术在车辆动力学方向的研究主要集中在建模和控制两个方面。
关于车辆动力学系统建模,主要是搭建多自由度车辆纵向动力学系统模型。以4自由度为例,通过建立自由刚体微分方程,充分考虑了车辆的转向和制动情况。进一步地,5自由度,如通过节气门的输入实验,模拟整车运动的过程中观察车辆车轮的速度和车轮的纵向滑移[21]。进一步地,有关7自由度整车动力学模型的研究更多,因为该模型稳定性好,能大大提高汽车主动避撞系统的避撞能力,如通过给出前轮转角的正弦曲线对车辆的操纵稳定性进行了验证分析;如采用滑模观测器估计车辆的运动特性;再如运用模型简化方法,同时建立电池模型和永磁同步电机模型[22]。更进一步地,有研究搭建车辆9自由度稳态动力学模型和10自由度车辆动力学模型,这两种模型不仅提高了汽车的避撞能力,同时改善了汽车行驶时的平顺性。
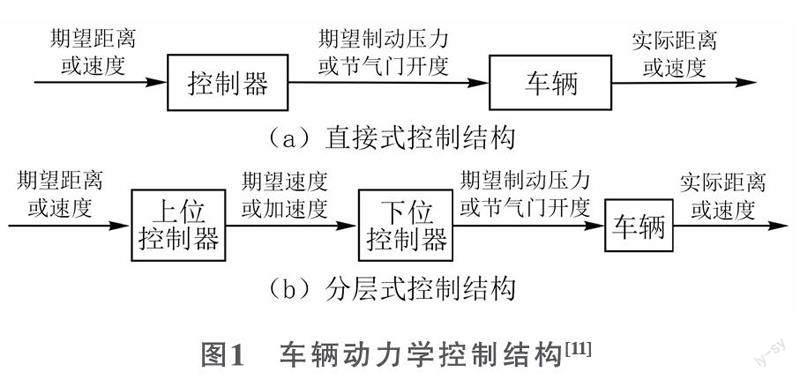
关于车辆动力学控制,其是通过设计的控制器来对车辆性能的参数进行调节。汽车纵向动力学控制分为直接式控制和分层式控制两大类,具体如图1所示[11]。当前国内外在该方面的研究都以分层式控制结构为主。以国外的一项研究成果为例,其采用的是分层式控制结构,由纵横向动力学的结合设计了车辆纵向速度预测控制器和第二预测控制器[23]。以国内的一项研究成果为例,其采用分层式控制器结构设计了整车控制策略,设计了纵向力分配的控制算法[24]。
2.5 差异化预警
差异化预警方法因其差异化特征的不同而不同,如有研究认为驾驶员因其年龄、性别、性格以及驾龄等因素的差异有着不同的驾驶特性[25]。进一步地,对每位驾驶员释放加速踏板和制动启动时刻的TTC值进行聚类分析[26]。更进一步地,利用BP神经网络对不同驾驶员群体的制动深度、驾驶员反应时间等特征参数进行学习[27],其纵向避撞安全辅助系统设计如图2所示。
2.6 优化算法
当前通过优化算法来提高智能网联汽车主动避撞能力的研究越来越多,这些算法往往基于不同的角度或不同的理论。为帮助驾驶人更好地规避潜在危险,一种基于TAP参数的汽车避撞系统算法被提出,其充分考虑驾驶人因素,选择了算法的报警方法[28]。进一步地,为比较多种算法的优越性,有研究对比了5种AEB算法对避免纵向碰撞仿真验证制动效果,这5种算法中,以即碰时间的TTC算法的纵向避撞性能最优[29]。还有研究突破了传统汽车主动避撞算法主要基于后车制动实现的局限性,利用车车通信获取前车信息计算理想车间距,通过分配前后车加速度来完成协同主动避撞[30],这种基于滑模控制的车车协同主动避撞算法弥补了传统算法的不足。但是以上研究内容都无法适应不同的路面条件,为此,提出了一种适应不同路面条件的换道避撞控制与自适应巡航控制相结合的控制算法,它基于PreScan 软件搭建紧急避撞场景模型,利用递推最小二乘法进行路面辨识[31]。
近几年,避障算法主要集中在人工势场算法、基于图片搜索算法、智能优化算法、协同算法。以人工势场算法为例,通过在人工势场函数中加入一个由目标点与车辆之间的距离得到的调节因子,使得局部目标点一直处于对称轴线上,从而避免了局部最小值[32]。进一步地,有研究人员通过在人工势场算法的基础上建立虚拟力场作用域,另外通过定义斥力函数,将速度、质量等因素考虑进去[33],其所建立的汽车模型参数如表2所示。以基于图片搜索算法为例,有研究人员先应用半定规划的迭代区域膨胀算法进行多次凸优化从而得到合理的内切椭圆,再通过A星算法得到内切椭圆中的最优路径[34]。以智能优化算法为例,其包括模糊逻辑算法、遗传算法、蚁群算法、快速扩展随机树算法、神经网络算法、粒子群算法等。以协同算法为例,有研究人员利用离散高斯卷积算法结合基于移动障碍运动状态估计的局部路径规划算法,在多条规划路径中选取最优避撞路径[35]。进一步地,为将损失最小化,通过蒙特卡洛算法求得碰撞概率。
3 智能网联汽车主动避撞技术的研究趋势
通过对以上智能网联汽车主动避撞技术研究文献的分析与总结,结合政策工具,本文预测未来该领域的研究更加趋向于优化算法、扩大应用范围等方面,具体如下。
3.1 研究算法逐步优化
无论是传统算法还是智能算法都有不足之处。以基于图片搜索算法为例,其得到的最优路径比较准确,但计算过程复杂;以人工势场算法为例,其实时性虽好,但局部最小化问题较为严重;以智能算法为例,其具有主动学习功能,但泛化能力差。未来算法将被逐步优化,并且多种算法协同避障成为了人们越来越关注的研究方向。
3.2 研究深度逐步加大
在行车安全状态判断方面,现有的汽车主动避撞系统大多准确性能差,难于获取行车时的关键参数,对驾驶员的主观感受等因素也考虑不够,未来会加大研究深度,统筹考虑多种因素。现有的很多避撞安全距离模型较为单一,未来将会针对安全距离模型应用新的算法或技术,将会加深研究力度。目前针对汽车路径规划与跟踪控制的研究,大多不能满足实时性要求,未来该方面的研究也将深入考虑实时效应。
3.3 研究范围逐步拓展
汽车更容易在低附着系数的路面发生交通事故,未来不仅是研究高附着系数路面上汽车行驶时的避撞问题,针对低附着系数路面避撞问题的研究将逐步增加。当前多数车企在制定AEB主动避撞策略时忽略了一个重要因素,即自车车速较大时发生碰撞的可能性会增加,未来研究范围将扩展到自车行驶速度较大时的避撞问题。轮胎附着力是影响安全距离测量的重要因素,已有研究中考虑该因素的较少,导致测得的安全距离偏大,未来针对该问题的研究将逐渐增多。汽车实际行驶时需综合考虑纵向制动和转向换道,所以研究范围亟待拓展,预测未来汽车纵横向相结合的避撞问题将成为研究热点。
3.4 四化程度逐步提高
这里的四化是指智能化、集成化、复杂化与信息化。越来越多的人工智能技术在汽车主动避撞系统中得以应用,汽车主动避撞技术的智能化程度越来越高。将主、被动安全技术有机地结合在一起,汽车主动避撞系统的集成化程度越来越高。应用到汽车主动避撞系统的控制器控制算法日趋复杂,避撞系统自身也更加复杂,其所包含的零部件逐渐增多,汽车主动避撞系统复杂化程度和电子化程度越来越高。
4 结束语
当前有关智能网联汽车主动避撞技术研究的文章越来越多,涉及到多种算法、多种技术的应用,还有从控制策略和车辆系统动力学的角度出发,综合了行车信息感知与处理技术。未来该領域的研究人员应综合多种算法或综合多个角度进行研究,单一的算法已无法满足现实需求。此外,通过对比研究,可以发现国内在该领域的研究成果相比国外有一定的差距,鉴于中国道路交通情况的复杂性以及当代社会对人身安全提出了更高的要求,提高智能网联汽车的主动避撞能力具有十分重要的现实意义,国内该领域的研究人员任重而道远。
參考文献:
[1] 赵瑞. 基于状态估计方法的车辆主动避撞控制策略研究[D]. 重庆:重庆理工大学,2022.
[2] 李立,徐志刚,赵祥模,等. 智能网联汽车运动规划方法研究综述[J]. 中国公路学报,2019,32(6):20-33.
[3] 胡远志,吕章洁,刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报,2017,8(2):136-142.
[4] CHOI C,KANG Y. Simultaneous braking and steering control method based on nonlinear model predictive control for emergency driving support[J]. International Journal of Control,Automation and Systems,2019,15(1):345-353.
[5] FILDES B,KEALL M,BOS N,et al. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes[J]. Accident Analysis and Prevention,2020(81):24-29.
[6] SATHIYAN SS P,KUMAR S S,SELVAKUMAR A I. Optimisedfuzzy controller for improved comfort level during transitions incruise and adaptive cruise control vehicles[C]//Proceedings of the 2021 International Conference on Signal Processing andCommunication Engineering Systems. Piscataway:IEEE,2021:86-91.
[7] 丁建峰,关志伟,杜峰,等. 基于安全距离模型的车辆跟随控制与仿真[J]. 天津职业技术师范大学学报,2017,27(3):24-29.
[8] 胡守俍. 基于安全距离模型的AEB系统仿真研究[J]. 汽车实用技术,2020(8):35-37.
[9] 来飞,黄超群,董红亮. 智能汽车自动紧急避撞系统的安全距离模型及其对比分析[J]. 重庆理工大学学报(自然科学),2020,34(9):39-46.
[10] 刘贵如,周鸣争,王陆林,等. 城市工况下最小安全车距控制模型和避撞算法[J]. 汽车工程,2016,38(10):1200-1205,1176.
[11] 廉宇峰,张涛焘,黄嘉南,等. 汽车纵向主动避撞系统的研究现状与展望[J]. 计算机应用,2021,41(S1):264-271.
[12] 宫铭钱,冀杰,种一帆,等. 基于激光雷达和视觉信息融合的车辆识别与跟踪[J]. 汽车技术,2020(11):8-15.
[13] SIVARAMAN S,TRIVEDI M M.Active learning for on-road vehicle detection:a comparative study[J]. Machine Vision and Applications,2019,25(3):599-611.
[14] CUI C J,LIU F,LI Z,et al. Vehiclelocalisation using a single camera[C]//Proceedings of the 2010 Conference on IntelligentVehicles Symposium. Piscataway:IEEE,2020:871-876.
[15] DUDEK M,KISSINGER D,WEIGEL R,et al. A versatilesystem simulation environment for millimeter-wave phased-arrayFMCW-radar sensors for automotive applications[C]//Proceedingsof the 2011 Conference on Asia-Pacific Microwave. Piscataway:IEEE,2017:1478-1481.
[16] 黄智勇. 基于毫米波雷达的汽车自动避障控制系统研究[J]. 佳木斯大学学报(自然科学版),2019,37(4):580-584.
[17] LIMA L C,AMORIM V J P,PEREIRA I M,et al. Usingcrowdsourcing techniques and mobile devices for asphalticpavement quality recognition[C]// Proceedings of the 2016 Brazilian Symposium on Computing Systems Engineering.Piscataway:IEEE,2020:144-149.
[18] 袁朝春,张龙飞,陈龙,等. 基于路面辨识的主动避撞系统制动性能[J]. 吉林大学学报(工学版),2018,48(2):407-414.
[19] RAJ K S D,KRISHHA I M. Kalman filter based target tracking fortrack while scan data processing[C]//Proceedings of the 2ndInternational Conference on Electronics and CommunicationSystems. Piscataway:IEEE,2018:878-883.
[20] 刘全周,贾鹏飞,李占旗,等. 改进的交互式卡尔曼滤波对雷达数据处理技术研究[J]. 机械科学与技术,2020,39(8):1248-1255.
[21] SATAR M I,HUDHA K,MAT W,et al. Modelling andverification of 5 degree of freedom vehicle longitudinal model[C]//Proceedings of the 10 th Conference on Asian Control.Piscataway:IEEE,2015:1-6.
[22] 闫丹彤. 电动汽车主动避撞控制系统建模与仿真研究[D]. 长沙:湖南大学,2015:11-20.
[23] PAUCA O,CARUNTU C F,LAZAR C. Predictive control for thelateral and longitudinal dynamics in automated vehicles[C]//Proceedings of the 23rd International Conference on SystemTheory,Control and Computing. Piscataway:IEEE,2019:797-802.
[24] 蘇昊,余卓平,熊璐,等. 分布式驱动纯电动SUV车辆控制策略研究[J]. 合肥工业大学学报(自然科学版),2019,42(4):439-444.
[25] 房曰荣. 不同类别驾驶员的驾驶行为特性差异实验研究[J]. 安全与环境工程,2020,27(5):204-208.
[26] WANG J Q,YU C F,LI S E,et al. A forward collision warning algorithm with adaptation to driver behaviors[J]. IEEE Transactions on Intelligent Transportation Systems,2021,17(4):1157-1167.
[27] 章军辉,李庆,陈大鹏. 基于BP神经网络的纵向避撞安全辅助算法[J]. 西安交通大学学报,2017,51(7):140-147.
[28] 张琼,郭应时,孙浩,等. 基于TAP参数的汽车避撞系统算法的优化与仿真[J]. 计算机工程与设计,2012,33(12):4652-4656.
[29] 胡远志,吕章洁,刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报,2017,8(2):136-142.
[30] 王庞伟,余贵珍,王云鹏,等. 基于滑模控制的车车协同主动避撞算法[J]. 北京航空航天大学学报,2014,40(2):268-273.
[31] 魏民祥,严明月,汪 ,等. 基于路面识别的汽车紧急避撞控制算法[J]. 汽车安全与节能学报,2017,8(4):359-366.
[32] 安林芳,陈涛,成艾国,等. 基于人工势场算法的智能车辆路径规划仿真[J]. 汽车工程,2017,39(12):1451-1456.
[33] 王树凤,张钧鑫,刘宗锋. 基于改进人工势场法的智能车辆超车路径规划研究[J]. 汽车技术,2018(3):5-9.
[34] 陈光荣,郭盛,王军政,等. 凸优化和A*算法结合的路径避障算法[J]. 控制与决策,2020,35(12):2907-2914.
[35] 彭晓燕,谢浩,黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程,2020,42(1):1-10.
(编辑 杨 景)
猜你喜欢
第一财经(2021年6期)2021-06-10 13:19:08
中国科技博览(2018年10期)2018-03-28 10:57:42
科技视界(2017年29期)2018-01-18 06:10:26
Coco薇(2017年9期)2017-09-07 21:23:49
汽车科技(2017年3期)2017-06-12 12:41:56
成才之路(2016年25期)2016-10-08 10:20:44
小学教学参考(语文)(2016年9期)2016-09-30 08:27:37
科技视界(2016年20期)2016-09-29 12:47:18
大众理财顾问(2016年8期)2016-09-28 13:50:46
纺织服装流行趋势展望(2016年2期)2016-05-04 03:47:15
