
基于蓝牙无线技术的室内定位方法研究
2023-09-15 13:14陈丽敏陈宇宁
无线互联科技 2023年13期
陈丽敏,陈宇宁
(1.福建电力职业技术学院,福建 泉州 362000;2.国网泉州供电公司,福建 泉州 362000)
0 引言
无线室内定位具有较为广泛的应用场景,蓝牙技术在这一领域占据着重要地位,其优点为运营成本低、识别距离远、传输速率较高。传统的蓝牙室内定位算法在实践中暴露出部分问题,包括精度不足、对环境变化缺乏适应能力等,因此要研究相关的改进方法,提升定位能力。
1 蓝牙Beacon技术及其在室内定位中的应用优势
1.1 蓝牙Beacon技术
Beacon是一种广播协议,建立在低功耗蓝牙协议的基础上,可实现低功耗蓝牙通信。蓝牙通信采用Socket连接,通信双方中有一方为服务器端,另一方为客户端。服务器端接收到客户端的服务请求后,为其产生一个BeaconID,并发送给客户端。客户端将接收到的BeaconID设置在蓝牙设备上,当双方的空间距离满足通信要求时,开启设备蓝牙,系统即可扫描识别Beacon设备,获取ID信息,建立连接后完成通信服务[1]。
1.2 蓝牙Beacon技术在室内定位中的应用优势
以Bluetooth Smart为代表蓝牙Beacon技术在室内无线定位方面形成了一系列优势:与对基础设施有较高要求的UWB(超宽带)、有源RFID以及Wi-Fi技术相比,蓝牙无线通信技术成本优势突出;BLE5.0最大可支持300 m的搜索距离,足以满足大部分通信需求;蓝牙5.0~5.3最大传输速率48 Mbps。
2 基于指纹库的蓝牙室内定位方法及仿真
2.1 传统蓝牙室内定位方法的缺陷
传统蓝牙室内定位技术在实践中主要问题:接收信号强度指示(RSSI)的稳定性不足、突发的干扰因素容易造成室内定位不准确、通信路径中的损耗计算与实际情况存在较大差异。
2.2 修正蓝牙接收信号强度指示
RSSI广播信号由Beacon基站发出,其稳定性对蓝牙室内定位的精确性具有显著影响,蓝牙技术通过电磁波传输信息,因而受到室内环境和人员活动的干扰,可借助技术手段修正RSSI信号,提升其稳定性,具体方法如下。

(1)
以上计算原理适用于室内每一个Beacon基站的RSSI信号修正,从而求得对应的修正系数αi。将基站Ai到待定位点的RSSI检测值记为ri,经过修正后的RSSI值Ri按照式(2)进行计算。
Ri=ri+αiri
(2)
2.3 信号传播路径损耗系数计算模型
传统的损耗模型以固定的场景为依据,提前设置各种影响损耗计算的环境参数,但是在实际情况下,环境参数并不一定符合预期,建立根据环境变化自动调整环境参数的算法模型是解决问题的关键,算法实现如下。合并损耗计算模型中的常量,统一表示为式(3)。
p(d)=A-10klgd
(3)
式中,将距离基站1 m远处的RSSI信号的能量均值记为A,路径损失系数记为k,客户端与服务端的距离表示为d。根据环境变化训练相关的参数,得到具有实时性的路径损失系数,过程如下。由公式(3)求得距离d的表达式。
(4)
(5)
当实际测得d1、d2以及Δd的情况下,即可求出实时路径损失系数k。
2.4 构建室内定位算法
传统指纹定位算法的实施流程可分为4个步骤,分别是在室内区域部署Beacon基站、构建离线Beacon基站的蓝牙指纹数据库、比较离线指纹库数据和在线实时定位数据、计算出客户端位置。针对离线指纹库难以适应环境变化的缺陷,本研究提出以下改进方法。
2.4.1 构建室内环境参考点矩阵
在室内空间选取k个参考点,将参考点Ai的平面坐标记为(xi,yi)。室内空间部署n个Beacon基站,参考点Ai到每个基站的RSSI值记为Ai1、Ai2、…、Ain。k个参考点与n个基站的RSSI值可形成一个矩阵,记为Hn。
(6)
式中,将参考点k与第j个Beacon基站的RSSI记为Bkj,最后面两列均为参考点的平面横纵坐标。
2.4.2 获取客户端线上实时定位阶段的RSSI矩阵
当客户端在Beacon基站的信号服务范围以内时,每个基站均向其发送信号,并产生对应的RSSI值,将基站i发送的RSSI信号表示为向量bi,于是得到矩阵h=[b1b2…bj…bn]。
2.4.3 在线数据和离线数据对比
在离线指纹库数据和在线数据的比对、匹配中,采用机器学习中的KNN算法,以样本数据库为基础,在不建立模型的情况下开展无监督学习,样本库在训练过程中可进行扩充,不会影响训练结果,KNN方法的训练实施过程如下。
(1)设定阈值。
RSSIij×(1-10%)≤βij≤RSSIij(1+10%)
(7)
式中,将Beacon基站j与参考点i的RSSI记为RSSIij。
(2)阈值与在线RSSI信号的比较。
将客户端在参考点i处获取的基站j的RSSI信号记为bi,对比bi和βij的取值范围,如果有bi∈βij,说明bi的在线数据满足精确度要求,未受到严重的环境干扰[3]。相反的,如果有bi∉βij,则说明该在线数据出现了较为明显的畸变,不能满足精确度要求,此时可将对应的参考点i过滤掉。
(3)计算欧式距离。
在上一步中过滤了不符合阈值要求的参考点,剩余的环境参考点可参与KNN训练过程。针对实时定位阶段获取的RSSI信号和可用参考点开展欧式距离计算,构成矩阵D。其中,欧式距离按照公式(9)进行计算。
D=[DB1DB2…DBn]
(8)
(9)
(4)算法输出结果。
矩阵D中含有n个元素,根据每一项数值进行排序,产生一个递增的新矩阵,记为D1。从该矩阵中取出前k项,对k项元素的横坐标和纵坐标分别求算术平均,即可得出训练输出结果。
2.5 算法检验及分析
2.5.1 RSSI信号修正效果仿真及分析
研究过程中设计开发了手机程序,将手机作为客户端,用于采集Beacon基站与手机端的RSSI信号。将基站作为坐标原点,以相同的步长逐渐扩大手机与基站之间的距离,最小距离控制为0.1 m,最大距离为10 m,采样点数量共计100个。分别采用传统方法和修正方法处理设备采集的RSSI信号,分析修正方法是否提升了RSSI的精确度,结果如表1所示。显然,修正后的算法检测的RSSI值更加接近实际情况,能够更加精确地反映出实际距离。

表1 RSSI信号修正仿真结果
2.5.2 路径损耗仿真及分析
选取3个基站,将基站作为原点,为其选择不同的采样点,在每个采样点使用不同设备采集20组数据,观察不同设备在同一位置处的采样结果所反映的RSSI和实际距离的关系。表2为3个基站的部分采样数据。从中可知,基站1和基站2的RSSI信号强度在采样距离变大之后逐渐趋于稳定,而基站3则整体呈下降趋势。说明路径损耗计算模型在实际应用中仍不理想,可能与基站的固有特性有关[4]。
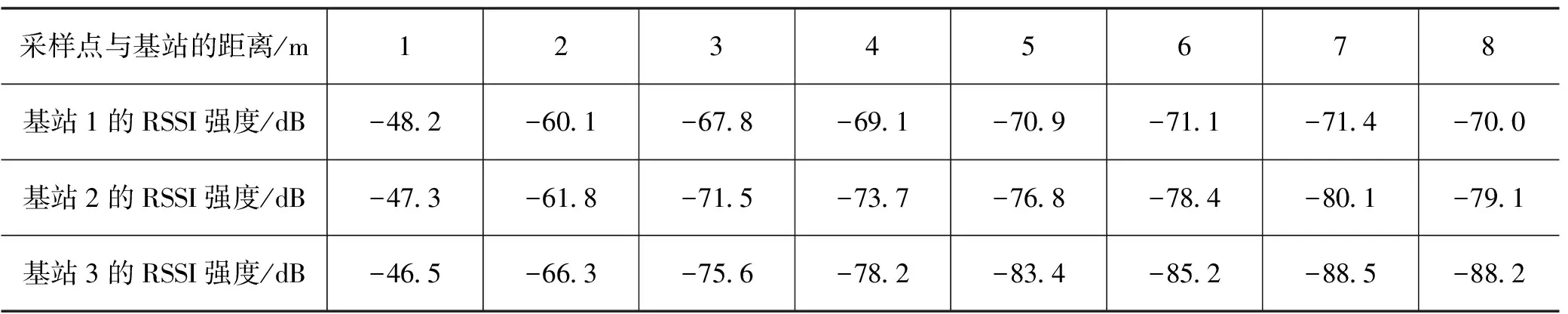
表2 RSSI检测值与实际距离的关系
2.5.3 室内定位效果检验及分析
利用研究中设计的改进型蓝牙指纹定位算法和传统的蓝牙指纹定位算法分别开展室内定位检测,获得100组数据,部分结果如表3所示。从中可知,研究中设计的新算法在精确性上明显优于传统的蓝牙指纹定位算法。
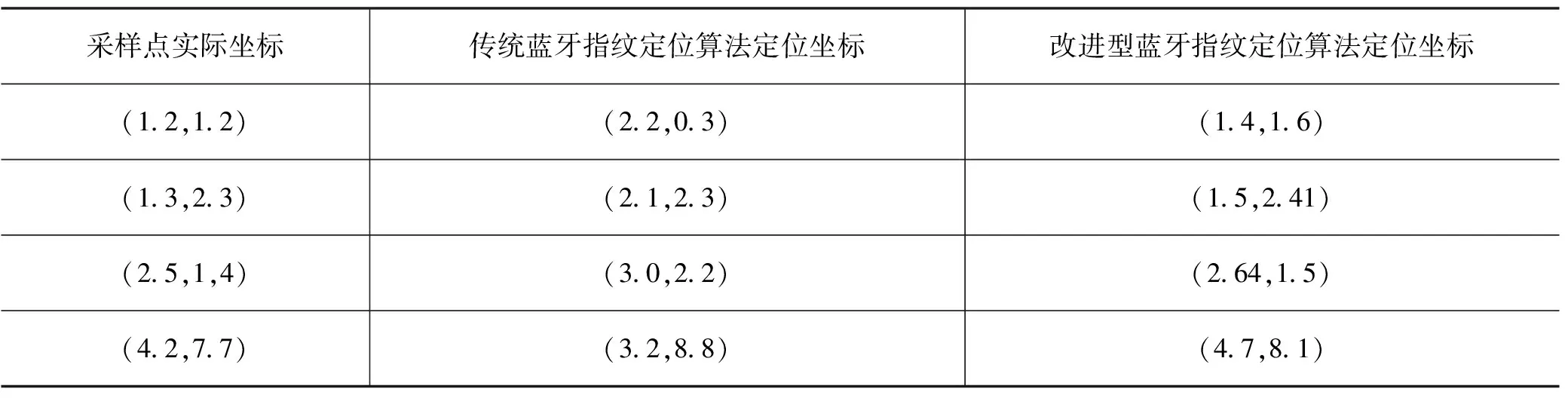
表3 算法定位数据
3 结语
研究过程以传统蓝牙室内定位技术为参考,在其基础上对RSSI进行修正,提出了优化信号传播路径损耗的模型,并设计了改进型的蓝牙指纹室内定位算法。总体而言,设计算法的精确度较传统算法有所提升,修正后RSSI也能更加准确地反映客户端与基站的距离。
猜你喜欢
小哥白尼(趣味科学)(2021年11期)2021-02-28
金属加工(冷加工)(2020年11期)2020-11-24
测控技术(2018年5期)2018-12-09
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
精密制造与自动化(2018年1期)2018-04-12
玩具世界(2017年8期)2017-02-06
自动化学报(2016年8期)2016-04-16
设备管理与维修(2016年5期)2016-03-16
