
三维激光扫描技术在防空洞体积测量中的应用
2023-09-14 01:57阮磊雷
现代矿业 2023年8期
阮磊雷
(马鞍山测绘技术院有限公司)
防空洞作为军民生产生活的避难所,在我国一定时期内做出了不可磨灭的历史贡献。随着社会经济发展,有些防空洞已消失应有的作用,需要在社会经济建设中予以拆除。安徽省某钢铁厂提质扩能,需对厂区一山体进行开挖平整建设新厂房,山体内一防空洞也应拆除,为准确获得山体的开挖量,需对山体内的防空洞进行体积测量。传统的测量多数利用断面法求得防空洞的体积,主要采用全站仪对设定的断面进行标高采集,该法对较为规整的单分支防空洞体积测量较为有效,对于多分支防空洞和不规则洞壁的防空洞测量上误差明显。三维激光扫描技术又称为实景复制技术,有效解决了传统测量方法的测量点单一、覆盖面窄的困难,实现防空洞体积精确测量。
1 作业原理
传统的体积测量以全站仪、水准仪等单点测量的方法为主,利用断面法、不规则三角网法等建立方量计算模型进行体积计算[1]。这些传统方法往往会遇到洞壁复杂多样、数据采集困难、数据量稀疏、采集时间长等问题,致使计算的体积和实际洞室体积存在一定的差异。三维激光扫描技术在扫描速度、数据密度及非接触性上具有一定优势,三维激光扫描技术在扫描速度、数据密度及非接触性上具有一定优势,其主要原理如下。
三维激光扫描仪主要由测距系统和测角系统构成,通过测距系统获取扫描仪至待测点的距离,通过测角系统获取扫描仪至待测点的水平角和垂直角。利用三角函数理论计算得到待测点的三维坐标,如图1所示[2]。
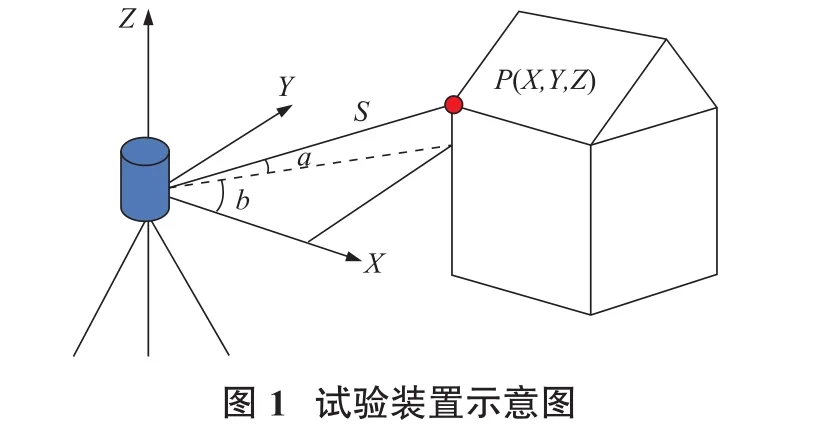
设待测点的斜距为S,水平角为b,垂直角为a,那么待测点P的三维坐标为[2]
点云是利用扫描仪本身的垂直和水平马达等驱动装置所获取的被测物体表面的三维坐标数据,包括色彩、强度等值。
利用三维激光扫描仪,可以深入防空洞内复杂的现场环境中进行扫描操作,并可以直接获取防空洞内各种形状复杂、不规则的防空洞表面及各洞室的实景三维数据,进而快速构建防空洞内的三维实体模型及计算各点、线、面、体所需数据。具体作业流程见图2所示[3]。
2 工程实例
2.1 项目背景
2022年4月,安徽省某钢铁厂因产能调整需要对厂区内一山体的部分区域进行开挖平整修建新厂房,开挖平整过程中需计算实际开挖方量。初步踏勘发现山体内有20世纪修建的防空洞,防空洞的部分范围位于本次开挖范围内。防空洞高约2.5 m,宽约2.5 m,呈半圆形。防空洞由北向南贯通山体,山体内防空洞呈现多分支状态,防空洞分支路径两侧配置若干洞室,部分洞室洞壁呈非规则状态。实际山体开挖平整计算方量时需要扣除在开挖范围内的防空洞的体积。
基于测量目的需要对防空洞进行必要的体积测量,为方便后期计算防空洞的具体涉挖方量,需在防空洞内建立一套与地面坐标系统相一致的坐标系,并与地面坐标系进行联测。
项目采用Faro X330D三维激光扫描仪进行扫描作业,项目防空洞内无照明设施,杂物较多。为保证三维激光扫描点云拼接精度,扫描测量采用标靶拼接,防空洞分支路径处采用预留标靶纸方式满足拼接要求。项目根据设计开挖范围,共需设站21站。站间距离设置为小于15 m,测量速度为488 000点/s,在25 m时误差为±2 mm,因防空洞内照明设备,本次扫描不采集点云颜色。
2.2 开测前准备
开测前准备工作中除基本踏勘和方案编写外,仪器准备中除上述提及的三维激光扫描仪外,另需准备控制测量使用的全站仪、棱镜、基座等相关设备,以及必要的照明设备。
2.3 控制测量
按照项目要求,本次控制测量采用《城市测量规范》中二级导线测量相关要求,获得相关边角数据及垂直角数据,通过导线计算,最终获得控制点的坐标值,见表1。
2.4 预设标靶和测站
经踏勘发现该防空洞存在多分支路径,为方便后期拼接。需在各个分支处放置固定标靶(至少2个以上),项目拟在分支处采用3个固定标靶纸作为后期拼接依据。
整个防空洞呈现非直线型布局,合理布置测站位置既能获得优质的点云数据,同时能够节省野外测量时间,本项目共拟布设测量26站。具体预设测站布置见图3,点位为预设测站位置。
2.5 安放标靶及扫描仪
项目采用的Faro X330D仪器具备倾斜补偿功能,利用脚架进行粗平后设置好扫描参数即可进行野外数据采集工作。标靶的放置应尽可能错落有致,高低不一,尽量不要摆放在一条直线上。本次测量在防空洞分支处洞壁上粘贴黑白靶标纸作为留存标靶,每处粘贴3个,以备另一条分支防空洞扫测时使用,方便数据拼接使用。
2.6 数据采集、检查、传输
本次采用的Faro x330D三维激光扫描仪在采集被测物体点云数据的同时将标靶信息一并采集。每站数据采集完成后,通过仪器自带的显示窗口对数据进行野外检查,主要查看内容:①野外点云数据质量,包括本站点云采集涉及的范围、噪声点云情况等,如果噪声点云数据过多过密,野外判断后期内业无法去除、修补的话,可就地对本站进行重新数据采集;②标靶信息采集质量,标靶信息采集质量关系到内业数据是否能完整拼接起来,主要查看标靶的清晰度和点云的密度以及与被拼接站的公共标靶个数是否满足后期内业处理软件的拾取。数据采集后直接通过SD卡储存,方便电脑传输。本次共完成26站三维激光点云采集,检查野外数据采集质量良好,各标靶信息采集完整,公共标靶个数满足站间拼接要求,SD卡点云数据存储良好。
2.7 数据预处理
项目利用Leica Cyclone软件对26站数据进行拼接和去噪作业,完成拼接和去噪作业后的数据仍有3 GB,如此庞大的数据不利于计算机的运算,所以需要对数据进行缩减。数据缩减的方法很多,但基本原则为缩减后的数据不改变被测物体的本来特征。本项目除2个防空洞洞室洞壁未用混凝土粉饰过,其他区域均已完成规则化处理。项目决定采用Leica Cyclone软件按照步长0.03 m进行数据缩减,最终获得1.2 GB的数据[4]。
按照项目目的需通过查清开挖范围内的防空洞的体积计算整个山体开挖后获得的实际体积,所以拼接好的点云数据需要与整体控制网保持一致,方便界定防空洞体积具体计算范围。利用前期控制测量获得的控制点数据,利用全站仪对粘贴固定的标靶纸中心坐标进行采集,利用Leica Cyclone软件对均匀分布在整个防空洞内的3处标靶进行配准,获得整体精度优于5 cm的点云数据,满足防空洞体积计算要求。
2.8 防空洞体积计算
体积计算大体是采用对点云数据进行三角网构建的方法,由防空洞洞壁向地面投影形成一个个三棱柱,再对所有的三棱柱进行积分求和。这种方法对底面绝对水平的防空洞是有效的,但事实上大多数的防空洞底部总体上是上下起伏的,局部上也是凹凸不平的。所以防空洞体积计算需要进行2次三棱柱体积积分,即首先求得洞壁至底面最低处形成的所有三棱柱的体积,再求得底面至底面最低处的所有三棱柱的体积,两者之差即为防空洞的体积[1,5]。
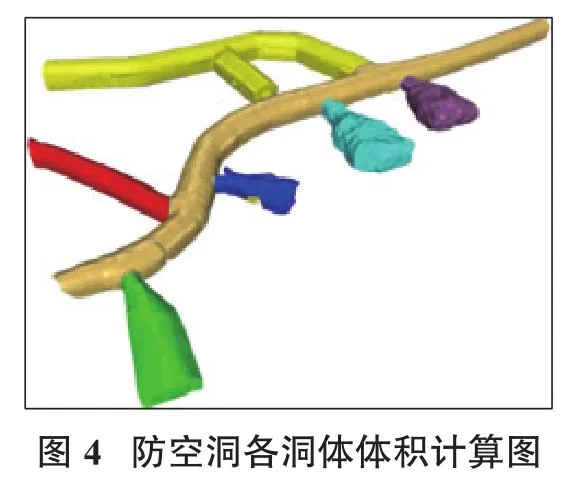
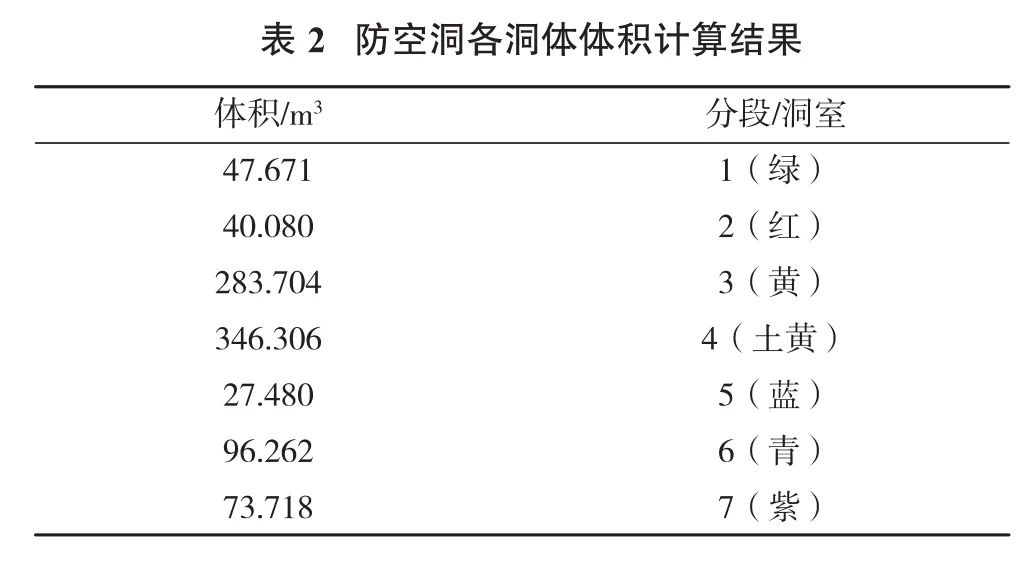
项目利用Cyclone 3DR软件构建Delaunay三角网,之所以采用Delaunay三角网是基于该三角网的2个特性:空外接圆性质和接近等边三角形的性质[3-4]。因项目要求,需对范围内的防空洞按段按洞室进行体积计算,利用Cyclone 3DR软件中分析菜单栏下的体积功能,逐个绘制需要计算的区域范围,模式选择自定义水平面,完成各段体积计算,具体计算结果见图4及表2。
3 成果质量检查
选取分段2作为三维激光扫描仪和全站仪体积计算比对的对象,全站仪采用断面法采集计算分段体积,三维激光扫描技术采用三角网Delaunay的方法采集计算分段体积。
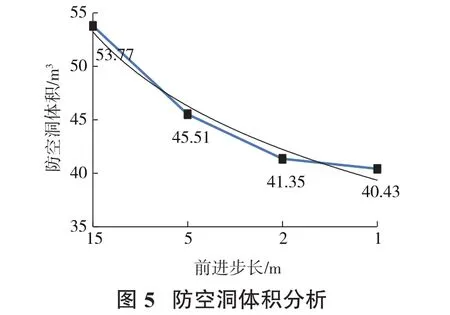
该分段全长15 m,洞室最高处约2 m,最宽处约2.2 m。首先分析全站仪断面法在什么样的步长断面下,求得的体积接近真值。全站仪分别按照步长1、2、5、15 m进行断面测量,每条断面均匀测量10个点,三维激光扫描仪按照足够点云密度扫测即可。通过计算发现全站仪量测时,步长越短,体积曲线越缓和,趋向于某个真值,见图5。
将全站仪断面法断面步长为1 m测得的体积与三维激光扫描技术采用的三角网Delaunay方法测得的体积进行比较,其相对误差在1%以内,见表3。
4 结论
(1)全站仪断面法采用的断面步长越小,获得的体积越与三维激光扫描技术采用的三角网构建方法获得的体积越接近。
(2)三维激光扫描技术能很好地解决复杂表面的数据采集,形成的点云数据具有一定的密度,对提高体积计算的精度具有相当大的作用。
猜你喜欢
金秋(2020年14期)2020-01-02
测绘工程(2018年3期)2018-03-20
智能计算机与应用(2017年2期)2017-05-04
电子制作(2017年20期)2017-04-26
测绘学报(2015年4期)2015-01-14
长江工程职业技术学院学报(2014年4期)2014-11-30
大地测量与地球动力学(2014年3期)2014-02-13
河南城建学院学报(2014年2期)2014-02-09
地理空间信息(2011年2期)2011-09-27
长江大学学报(自科版)(2011年1期)2011-02-10
