
三维激光扫描作业中测量精度影响因素及控制措施*
2023-09-14 01:57朱尚军李世保
现代矿业 2023年8期
朱尚军 岳 迅 李世保
(1.安徽省地质测绘技术院;2.安徽理工大学空间信息与测绘工程学院)
三维激光扫描技术在古建筑修复、虚拟现实、古文物的修复与保护等领域有着广泛的应用[1]。因为其高密度、自动化、无接触式等优势迅速成为开采沉陷与变形监测领域研究的热点之一;其克服了传统工程测量中工作量大,观测站易丢失,观测周期长等缺陷,成为我国开采沉陷与防治体系和技术领域不可或缺的一项技术[1-2]。三维激光扫描技术实现了开采沉陷领域从点状与线状数据跨越到面状三维数据的实质性进步;在煤矿沉降区实时监测过程中该技术可以无接触实时监测整个煤矿区沉陷盆地的三维数据,实现了高速有效地收集测量数据资料,为煤矿区安全生产与地表建筑物的采动损害评估与防治提供保障。
传统的水准测量技术最早起源于19世纪,随着测量仪器的成熟与发展后续成功将全站仪与GPS技术、无人机技术、InSAR技术与三维激光扫描技术引入到我国开采沉陷与变形监测体系中[1-3]。王磊等[2]提出了一种基于概率积分法辅助的开采沉陷三维激光扫描监测方法,构建了基于QPSO的3DLS-PIM模型参数求解方法,实现了概率积分法与三维激光扫描技术的相结合。吴侃等[3]提出了利用三维激光扫描技术获取房屋的特征线,从而判断房屋是否存在变形。戴华阳等[4]利用三维激光扫描技术提取了煤矿区地表建筑物形变量,并分析了该技术满足工程应用精度。李强等[5]通过两期三维激光扫描测量结果做差求出煤矿区下沉值。朱尚军等[6-7]结合量子粒子群算法构建了基于三维激光扫描技术的煤矿区地表建筑物采动损害评估方法。
三维激光扫描技术已经成为我国开采沉陷与变形监测领域不可或缺的技术之一[1-5]。本文系统讨论了三维激光扫描仪技术在测量应用中的精度影响因素,通过中海达HS-650扫描仪在检校场进行了检校试验,讨论了其内外符合精度,并从扫描目标不等高、扫描距离、点云密度等方面分析了扫描仪对测量结果精度的影响。
1 三维激光扫描技术的基本原理
三维激光扫描仪通过点云信息识别物体并赋予其空间三维坐标信息;物体的三维信息是相对于三维激光扫描仪的相对坐标,后续经过点云的处理与坐标转换可得到物体的绝对坐标。三维激光扫描仪的坐标系统如图1所示。
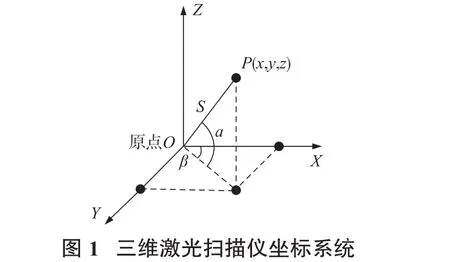
物体点云三维坐标信息中P(x,y,z)点的坐标计算公式为
式中,x,y,z为点P的三维坐标;S为P点至坐标原点O点的距离;α为纵向扫描角度;β为横向扫描角度。
2 三维激光扫描技术的测量结果精度影响因素分析
三维激光扫描技术在测量应用中主要的误差来自于数据采集、点云数据处理与仪器本身的误差[1]。目前的点云数据处理技术已经较为成熟[8-12],但针对于仪器本身的误差及点云数据采集过程存在的误差讨论较少,故此本文主要从扫描目标不等高、扫描距离、点云密度等方面分析了扫描仪对测量结果精度的影响。
2.1 检校场概况
由于检校试验包括点云密度以及目标物的扫描距离对测量结果的影响等实验,故此要求检校场地足够空旷,不会对试验结果造成干扰。针对上述问题,本研究将检校场设立在安徽理工大学北门广场,该场地人流量少,对检校试验影响较小。采用了直径为72.5 mm、容易携带、成本较低的靶球。
分析三维激光扫描技术的精度主要通过点云的点位中误差;在观测条件一致的基础上,将同一观测目标物三维激光扫描值与参考值进行对比分析。若三维激光扫描仪观测出某点的坐标为(X,Y,Z),则该点的点位中误差σ为
将点云中某点多次观测取得的三维坐标信息取均值,依据式(2)就可求得该点的点位中误差,N为观测次数;(,,)为物体N次观测值的三维坐标均值。
2.2 外符合精度评价
外符合精度考究的是仪器本身的误差;通过仪器的测量值与真实值对比可得出仪器的相位差,从而获得仪器本身的测量精度。针对于中海达HS-650三维激光扫描仪的外符合精度,通过控制点的三维坐标信息求取标靶球球心的真实坐标,随后将中海达HS-650扫描仪测量获取的标靶球球心坐标与真实值进行对比求差,从而对该仪器的测量精度进行评价。该试验的设计图与测量精度结果见图2和表1。
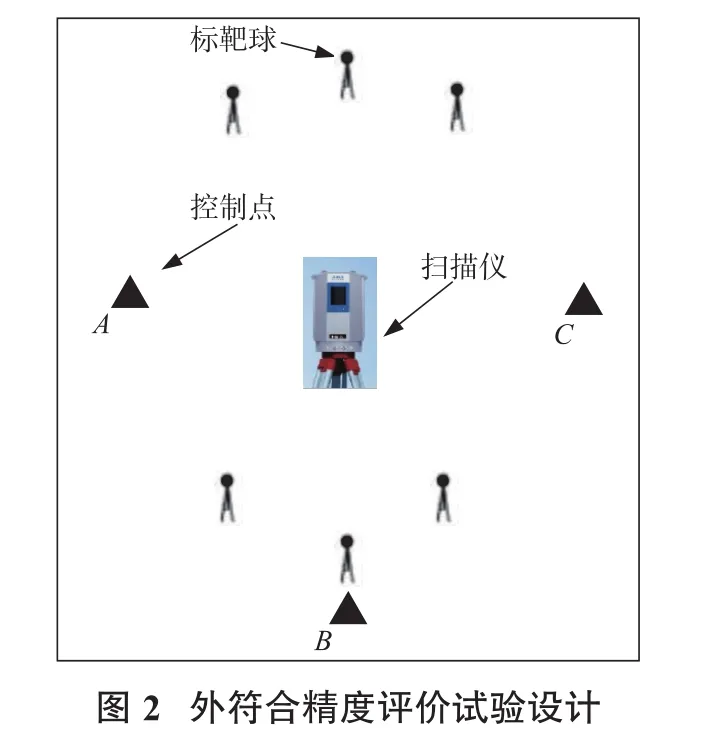

通过计算可以求得中海达HS-650三维激光扫描仪的相位差,σ=±6.9 mm;表明该仪器的测量精度与全站仪相当。
2.3 内符合精度评价
内符合精度考究的是仪器自身的稳定性,将多次测量的结果取均值并依次与测量值进行对比,即可获得观测值的点位中误差,依据精度分析结果可以与仪器的制造商提出的精度进行比较,从而验证仪器的稳定性及精度。针对中海达HS-650三维激光扫描仪的内符合精度,本文通过20次观测标靶球球心坐标取均值,并将每次的测量值与均值进行对比分析,获得观测点的点位中误差。1~6号标靶的中误差结果如表2所示(观测设计方案同外符合精度实验方案)。
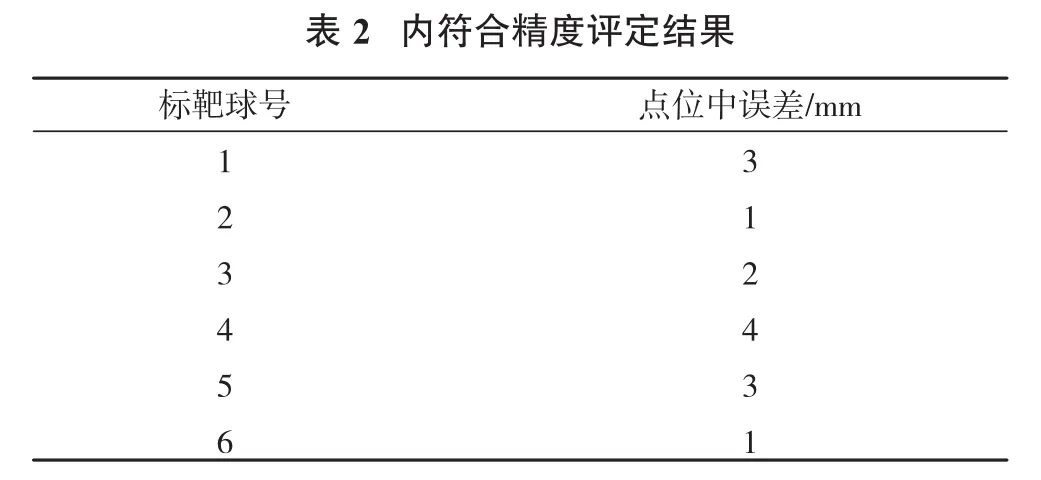
从表2可看出,中海达HS-650三维激光扫描仪同等点云密度与观测距离的条件下观测标靶球的内符合精度可达到4 mm。
2.4 三维激光扫描目标不等高对测量结果的影响
三维激光扫描技术应用于测量时观测目标形式多样,同时多测站之间需要点云数据拼接等数据处理过程,实际过程也无法保证扫描目标以及标靶高度一致,故此需要分析三维激光扫描目标不等高对测量结果的影响。通过将标靶球架设高度依次降低5 cm的测量结果与标靶球等高的测量结果进行对比求取点位中误差,从而得出试验结论。试验结果如表3所示(2次试验皆扫描了20次取均值)。

依据试验结果可得出:点位中误差依旧小于4 mm,三维激光扫描目标不等高不影响测量结果精度。王磊等[1-2]利用三维激光扫描仪在淮南顾北矿南煤采区1312(1)工作面实地测量时,因为工作面地形复杂相邻测站之间点云数据拼接困难,将标靶球设立在不等高的空旷区域,最后将每一测站点云数据进行统一坐标转换。上述试验结果为点云数据的统一坐标转换提供了实践基础。
2.5 目标物的扫描距离对测量结果的影响
由三维激光扫描仪测量原理与误差来源分析可知扫描仪的测量距离对点云密度有很大的影响,相同点云密度条件下,距离越远点云密度越低,故此在实地测量中需要设计出三维激光扫描仪的最佳测量距离,可以最大程度节约成本与观测时间。针对HS-650三维激光扫描仪的最佳测量距离,首先利用全站仪后视定向测量出距离仪器架设点10、15、20、30、40、50 m各测距下的标靶球球心坐标真实值,随后将中海达HS-650三维激光扫描仪多次扫描测量值取均值,与真实值进行对比。目标物的扫描距离对测量结果的影响点位中误差如表4所示。
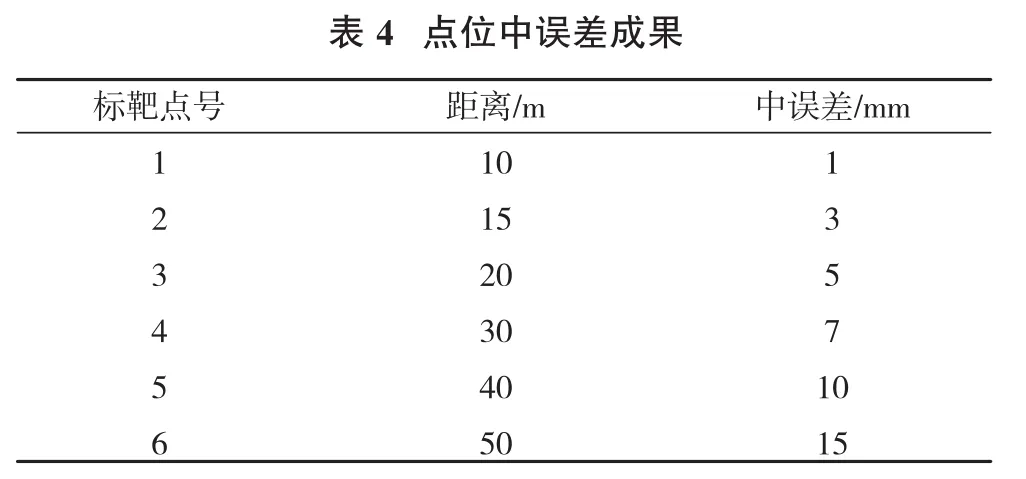
从表4可看出,针对于中海达HS-650三维激光扫描仪,点位中误差随着目标物的扫描距离的增加而增加,两者关系成正相关。故此将中海达HS-650扫描仪应用于实地测量时,目标物的扫描距离应控制在40 m内,此时点位中误差小于10 mm。吴侃等[3]提出了利用建筑物特征线是否变形来判定建筑物变形时,对三维激光扫描仪单点定位精度进行了研究,并将测量结果同仪器厂商提出的标称精度进行了比较,验证了利用建筑物特征线变形来判定建筑物变形的可行性。上述试验为三维激光扫描技术应用于煤矿区变形监测提供了实践基础,合理的扫描距离使得测量结果更加规范化与合理化。
2.6 点云密度对测量结果的影响
密度的点云每个测站的扫描时间过长,如何设计出符合工程应用的点云密度是三维激光扫描技术成功应用于工程测量的基础之一。在三维激光扫描仪扫描物体的距离对测量精度的影响试验的基础上,利用不同点云密度对1~4号标靶球进行多次扫描取均值,随后与真实值进行对比。结果见图3。

从图3中可看出,测量结果的精度随着点云密度的降低而降低,两者关系成正相关。垂直与水平分辨率设置在0.038 4°与0.009 6°,可以有效增加中海达HS-650三维激光扫描仪在实地测量中的效率,此时每个测站扫描时间小于20 min。戴华阳等[4]在采动区房屋移动变形提取过程中,提出采用手动量取同名特征点(房屋角点)的绝对变形量来获取房屋的移动变形数据,该方法的基础是扫描仪扫描测量房屋角点的点云密度与测量精度满足工程应用要求。上述试验结果为采动区房屋移动变形提取提供了实践与理论基础,验证了三维激光扫描技术在煤矿区变形监测的实用性与可行性。
3 精度控制措施
(1)针对不同三维激光扫描仪应用于工程测量应用中时,可通过上述实验检验仪器的本身精度,同时设计出最佳的扫描测量距离与点云密度,最大程度降低了观测时间。
(2)在实地测量中设立标靶数应控制在4个及以上,该做法可以避免偶然误差,设立某一个标靶为检测点。
(3)测量作业中仪器的架设点尽量在空旷并且视野可通视处,可以降低噪声点的影响。
4 结论
(1)本文对三维激光扫描技术的测量结果精度影响因素展开了研究,并结合试验结果联系实际工程案例论证了试验的合理性与必要性。结果表明:HS-650扫描仪的测量精度与全站仪相当,内符合精度可达到4 mm;扫描目标不等高不影响测量结果精度;目标物的扫描距离与点云密度和测量精度成正相关;上述试验为三维激光扫描技术应用于煤矿区变形监测提供了实践与理论基础,验证了三维激光扫描技术在煤矿区变形监测的实用性与可行性。
(2)三维激光扫描技术应用于测量应用中主要的误差来自于测量时的观测误差,点云数据预处理过程中的去噪误差以及仪器本身的误差。主要的控制措施如下:三维激光扫描技术应用于实际测量时,首先应设计出最佳的扫描测量距离与点云密度;在实地测量中设立标靶数应控制在4个及以上;测量作业中仪器的架设点尽量在空旷并且视野可通视处。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年2期)2022-08-11
测绘工程(2018年3期)2018-03-20
百科探秘·航空航天(2017年12期)2018-01-31
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
河南城建学院学报(2014年2期)2014-02-09
现代营销·经营版(2013年5期)2013-05-14
