
北斗三号广义RDSS 定位原理及定位精度研究
2023-09-14 07:35赵中阳周云
电子元器件与信息技术 2023年6期
赵中阳,周云
1.中国电子科技集团公司第五十四研究所,河北石家庄,050081;2.陆装驻石家庄地区第一代表室,河北石家庄,050081
0 引言
北斗RDSS定位业务起源于陈芳允院士提出的双星定位技术方案,并成功应用于北斗一代、二代和三代卫星导航系统[1]。RNSS定位由北斗二代的亚太地区服务发展到北斗三代的全球区域服务,可为全球用户提供安全可靠的定位服务。目前北斗三代系统同时向用户提供RNSS和RDSS两种业务,其中RNSS业务由搭载RNSS业务载荷的GEO、IGSO和MEO提供,RDSS业务由搭载RDSS业务载荷的GEO卫星提供。因此,北斗系统可以将RNSS业务和RDSS业务结合起来,提供广义RDSS业务服务,为用户提供更为快速和更高精度的定位结果[2]。
1 广义RDSS定位原理
广义RDSS业务采用三星定位原理,即用户选择需要观测的三星定位组合星座:其中需要选择一颗具有提供RDSS业务能力的GEO卫星和另外两颗可以提供RNSS业务能力的卫星,GEO、IGSO或MEO卫星均可。广义RDSS定位原理示意图如图1所示。

图1 广义RDSS 定位原理示意图
用户机通过RDSS链路向中心发送RDSS业务申请,中心站通过计算传输时延得到用户机的RDSS业务伪距观测量,加上用户在RDSS业务电文中填入的至少三颗RNSS伪距观测量信息,可以建立用户机伪距观测方程组[3]。采用类似于RNSS单点定位所使用的最小二乘法等算法,中心站可以通过解析方程组得到用户的位置信息(x,y,z)以及钟差信息t,并通过下行链路将位置信息发送给用户,以实现广义RDSS定位结果的获取。
式(1)中:xs1(t1)表示t1时刻卫星1在坐标系x方向的位置,即xsn(tm)表示tm时刻卫星n在坐标系x方向的位置信息,ysn(tm)和zsn(tm)同理,表示tm时刻卫星n在坐标系y和z方向的位置信息。δt表示接收机本地时与北斗时的钟差信息。t1是搭载RDSS业务载荷的GEO卫星广播的RDSS业务出站信号时刻,t2是该卫星接收用户RDSS业务入站时刻,P1,RD是中心站通过搭载RDSS业务载荷的GEO卫星得到的用户机双向RDSS伪距观测量修正值。P1,RN、P2,RN、P3,RN是用户机上报的三颗搭载RNSS载荷卫星的伪距观测量修正值,由于GEO卫星在某些频点(例如B1I、B3I和B2a)既搭载了RNSS业务载荷又搭载了RDSS业务载荷,所以P1,RD和P1,RN可以由同一颗GEO卫星提供,加上提供P2,RN、P3,RN伪距信息的两颗RNSS业务卫星,实现三星定位。值得指出的是,对于使用三星定位的广义RDSS定位业务,实际上使用了同一颗卫星在不同时刻的两个观测量信息,从而构成一个具有四个等式和四个未知数的方程组,其理论本质是基于RNSS定位算法,保留了RNSS定位算法的定位特点。
2 广义RDSS定位特点
广义RDSS定位算法同时又区别于传统RNSS定位算法:RNSS定位算法需要获取至少四颗卫星的星历电文来解析出卫星位置信息,此外还需要获取电离层模型参数、卫星钟差信息等参数来进行模型误差修正;广义RDSS定位由于其解算在地面中心站完成,而中心站对卫星位置信息、电离层模型参数以及卫星钟差信息等的获取是实时的,并且拥有更多的途径来获取精密的参数信息,例如通过地面网获取更加精密的卫星轨道信息等,可以更快速地、更准确地解算出用户位置信息,不受本地PVT算法和修正参数获取局限性的制约[4]。广义RDSS与传统定位的区别如表1所示。

表1 广义RDSS 与传统定位的区别
3 广义RDSS定位精度分析
目前北斗三号提供的公开服务信号有B1I、B1C、B2a、B2b和B3I五个频点。本文分别就不同频点对广义RDSS定位精度进行分析,各频点测试结果如图2-图6所示。
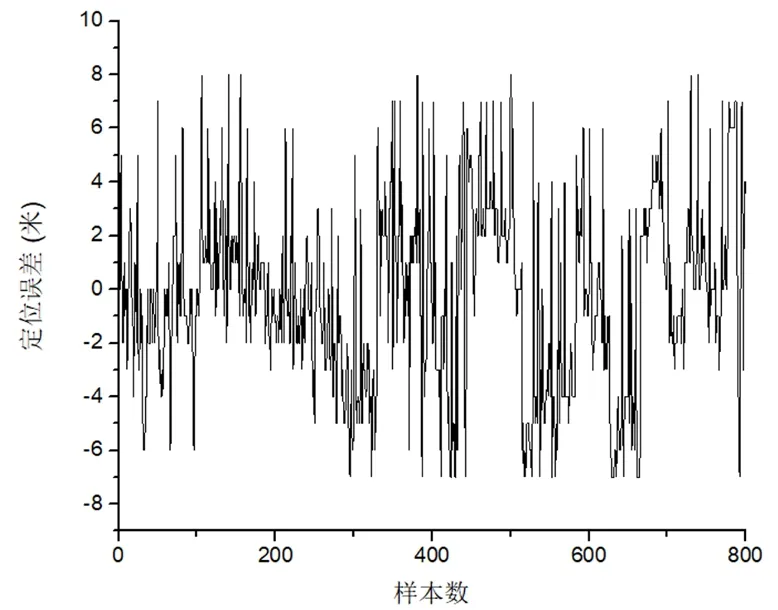
图2 B1I 广义RDSS 定位误差数据
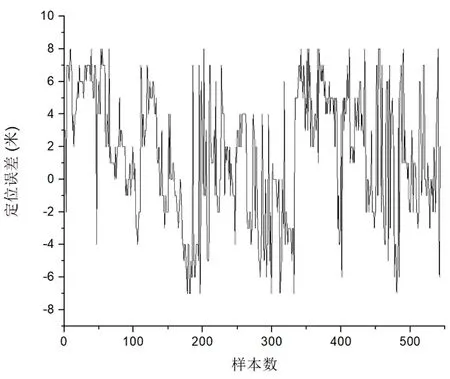
图3 B1C 广义RDSS 定位误差数据

图4 B2a 广义RDSS 定位误差数据

图5 B2b 广义RDSS 定位误差数据
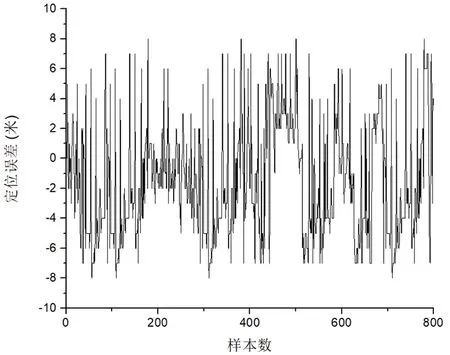
图6 B3I 广义RDSS 定位误差数据
通过分析可以得出结论:在静态下,各个频点的广义RDSS的定位精度均可满足±10m指标,与同时段的RNSS定位结果精度相当。由于受服务频度的限制,定位间隔时间较长,导致定位结果浮动较大。与RNSS定位算法相同,广义RDSS算法的解算精度也会受到DOP的影响,不同DOP值下的比较如图7-图8所示。
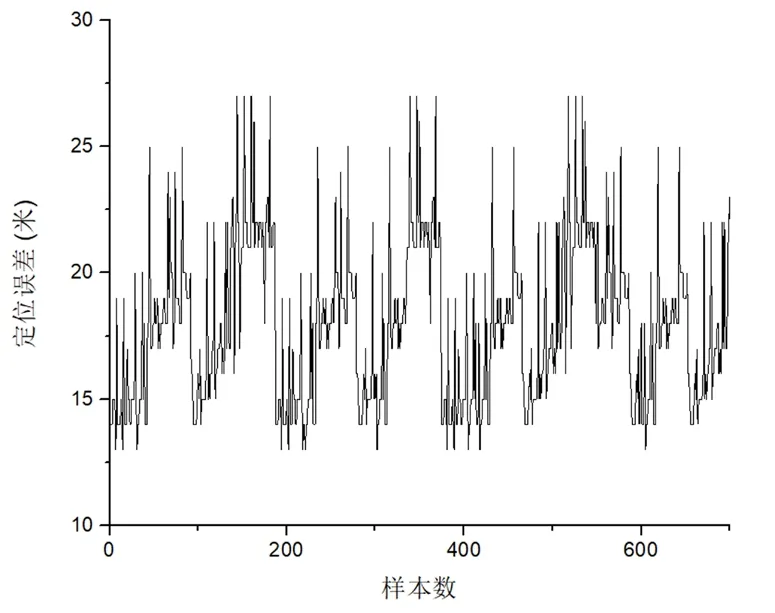
图7 DOP 值较大时广义RDSS 定位误差数据

图8 DOP 值较小时广义RDSS 定位误差数据
由于广义RDSS定位比RNSS单点定位要快,所以在进行广义RDSS定位选星的时候,RNSS尚未完成定位,这样便无法获取卫星准确的方位角和俯仰角信息。通常选择可视卫星进行定位运算的策略有以下几种。①尽量多地使用载噪比高的卫星观测信息进行上报。相比载噪比低的卫星,高载噪比卫星仰角一般更高,更不容易被遮挡,观测量数据更好,更可靠。②尽量使用MEO卫星参与定位。MEO的运行轨道相比IGSO和GEO的运行轨道方位更加分散,可以使参与定位卫星的DOP值更小。③尽量不使用和RDSS波束在相同卫星上的RNSS观测量进行上报。使用相同GEO卫星不同时间且非常短的位置去参与定位,否则相当于少上报一颗RNSS卫星的观测量信息。
4 结语
广义RDSS作为北斗三号的特色之一,相较于北斗二号定位算法,有着诸多优势:定位精度方面与RNSS单点定位精度相当,优于RDSS定位;定位时间方面虽长于RDSS定位,但由于其定位解算在中心站执行的特点,可以不用收齐卫星的星历和钟差等信息,与RNSS热启动时间相当。广义RDSS算法的实现也存在劣势:广义RDSS定位需要RDSS和RNSS同时接收的特点,对接收机提出更高的要求,需要支持RNRD双模工作模式、具备北斗三号接收和发射功能;与RDSS定位相似,广义RDSS的算法由中心站完成,定位频度受到中心站服务频度的制约,无法做到RNSS的高频度连续定位。
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
数学物理学报(2022年3期)2022-05-25
当代陕西(2019年18期)2019-10-17
中国中医急症(2019年10期)2019-05-21
中国经贸导刊(2017年28期)2017-12-02
网络安全和信息化(2016年2期)2016-11-26
数学年刊A辑(中文版)(2016年2期)2016-10-30
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
学习月刊(2015年18期)2015-07-09
