基于自抗扰技术的扫描机构控制
2023-09-05 12:09:36董杰迟冬南徐丽娜张冬朱军
航天返回与遥感 2023年4期
董杰 迟冬南 徐丽娜 张冬 朱军
基于自抗扰技术的扫描机构控制
董杰1迟冬南1徐丽娜1张冬1朱军2
(1 北京空间机电研究所,北京 100094)(2 航天东方红卫星公司,北京 100094)
针对空间扫描机构在多工作模式下高精度控制的问题,文章提出了采用自抗扰技术设计非线性比例、积分和微分(Proportional Integral Derivative,PID)控制器的方法。根据扫描型光学遥感器任务要求,扫描运动机构的工作模式为扫描范围和扫描速度多种组合,即多档扫描范围及同一扫描范围内两档扫描速度。由于扫描机构运动控制精度要求高,采用一组控制参数无法实现多模式下的高精度运动控制,经过对扫描机构链路分析,认为摩擦力矩在不同工作模式下的非线性程度会对控制系统造成影响。因此,文章引入摩擦力矩模型对控制系统进行补偿,采用自抗扰技术设计非线性PID控制器,实现不同工作模式下扫描系统的精确控制。通过算法和多模式扫描运动系统仿真实验验证,说明了该方法能够有效补偿摩擦力矩引入的扫描系统非线性影响,进而保证多模式下的扫描高精度运动控制精度。
多模式扫描机构 摩擦力矩补偿 自抗扰技术 非线性比例、积分和微分控制 航天光学遥感器
0 引言
空间扫描遥感器是在探测器研制、焦面制冷等技术的约束下,为了满足大视场、宽幅面成像需求而提出的。随着图像分辨率等遥感器性能要求的提高,遥感器扫描系统的控制性能要求也更加精确。由于扫描成像系统需要通过活动机构完成光学成像,作为其负载的扫描镜的尺寸、质量、体积都受到了严格限制,同时,需要机构设计与运动控制协调综合考虑,以满足最终的精确控制要求[1-3]。在未来一段时间内,由于受面阵红外探测器和大冷量制冷机研制的约束,通过扫描镜进行穿轨方向的一维摆扫和旋转扫描获取二维图像,仍然将作为一种有效的方式继续发展。随着各项指标的不断提高,扫描成像技术也将不断发展。
运动机构设计过程中,轴系支撑所产生的摩擦力矩是影响高精度控制的主要因素,尤其是非线性摩擦力矩会严重地影响扫描系统的控制性能[4-7]。扫描式遥感器工作过程中,扫描镜的摆扫或旋转扫描速度属于低速运动。在低速状态下,摩擦力矩呈现非线性特性。文献[8]分析了系统低速下的非线性摩擦力矩对系统性能的影响,通过负载观测器对系统负载的变化进行观测,提高低速“爬行”阶段的系统控制的稳定性。
由于摩擦力矩的普遍存在性,针对机构设计的多种摩擦力矩模型已经相继提出,如:Dahl模型、Bristle模型、LuGre摩擦模型、Tustin模型等[9],在高精度控制器设计过程中,摩擦力矩补偿已经发挥了重要作用。文献[10]引入改进型的Tustin摩擦模型对非线性摩擦力进行估计,并针对速度环进行补偿控制,引入摩擦力补偿前后,速度误差由18%降低到3%。
在对摩擦力进行补偿时,由于摩擦力矩模型仅能够在一定程度上对摩擦力进行描述,其准确性及在特定机构表现的特征都具有不确定性。因此,在摩擦力补偿时,提出了采用非模型补偿法,包括比例微分/比例积分微分PD/PID(Proportional Derivative/Proportional Integral Derivative)摩擦补偿方法、震颤信号方法、脉冲控制方法、力矩反馈法、变结构摩擦补偿及基于干扰观测器补偿方法等。文献[11]针对大范围的负载惯性机构伺服系统,采用基于模糊神经网络补偿的状态观测器复合控制,补偿了低速状态下的非线性摩擦力矩和外部干扰,实现了直流电机飞行仿真转台的有效控制;文献[12]以飞行仿真转台为对象,将摩擦力矩视为系统的不确定因素,利用高增益观测器对速度信号进行估计,利用扩展观测器状态对摩擦力矩进行实时估计,并反馈到速度环,检验速度环的跟踪能力,完成摩擦力矩补偿。
本文旨在解决扫描型空间光学遥感器多种工作模式组合下的高精度控制问题,针对多模式下的空间扫描机构的高精度控制问题,引入LuGre摩擦力矩模型进行补偿,并结合自抗扰技术完成非线性PID控制器设计。
1 空间扫描系统建模
1.1 扫描系统描述
本文所研究的多模式扫描机构,其扫描范围为2°, 4°, ···, 10°。在每个扫描范围内,扫描速度可以设置为1°/s和5°/s。扫描机构共有10种工作模式,具体组合如表1所示。
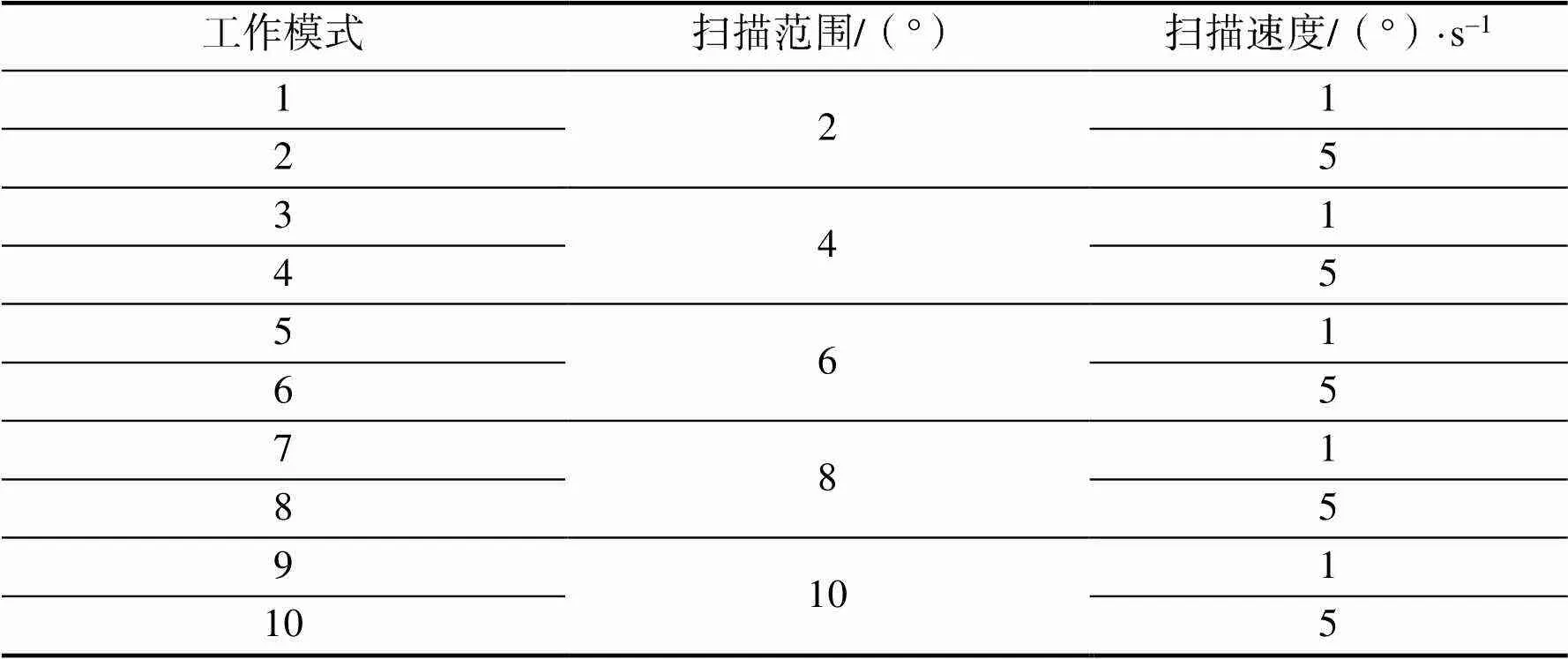
表1 扫描系统工作模式
扫描系统摩擦力矩与扫描速度相关,因此,在不同的工作模式下,同一组控制参数的有效性需要通过实验进行考察。当无法满足各模式下的性能要求时,需要针对具体的工作模式,进行参数调整。控制参数调整包括在线和离线两种方式。在工程设计中,需要根据控制要求、参数调整所耗资源等确定是否能够在线调整。本文中,采用离线调整,即将各模式下的参数确定,并固化在控制器中,扫描系统工作过程中,根据工作模式提取相应的控制参数。控制器设计时,扫描系统的模型描述如下


1.2 摩擦力建模
扫描机构转轴与固定部分会产生相对的运动或相对的运动趋势,进而产生摩擦力。从相对静止到具有相对运动趋势,再到相对运动,摩擦现象可以分为四个阶段[13]:触面弹性形变阶段(I)、边界润滑阶段(II)、部分液体润滑阶段(III)和完全液体润滑阶段(IV)。
Stribeck于1902年通过实验发现,系统从静止变为运动的过程中,摩擦力可分为库伦摩擦力、粘滞摩擦力、静摩擦力等,且相互耦合,形成连续变化的综合摩擦力,其作用于系统上表现为[14]:
1)低速运动时,摩擦力大小随着速度的增大而减小;
这一现象描述了相对接触的物体间,摩擦力与相对运动速度的特性,称为Stribeck现象。在稳态时,相对速度与摩擦力之间的函数关系通过Stribeck曲线予以描述,图1为文献[14]描述的Stribeck曲线。
由图1可知,在不同转速下,摩擦力变化呈现非线性。由此,扫描机构在转动过程中摩擦力呈现非线性特性。在机构设计中,LuGre摩擦力矩模型能够精确地描述运动系统的静态和动态摩擦特性[14],具体见图2。LuGre摩擦力矩模型对Stribeck现象进行了很好的诠释。本文采用LuGre模型描述扫描机构转动过程中摩擦力的变化情况,并将摩擦力矩补偿引入控制器设计。
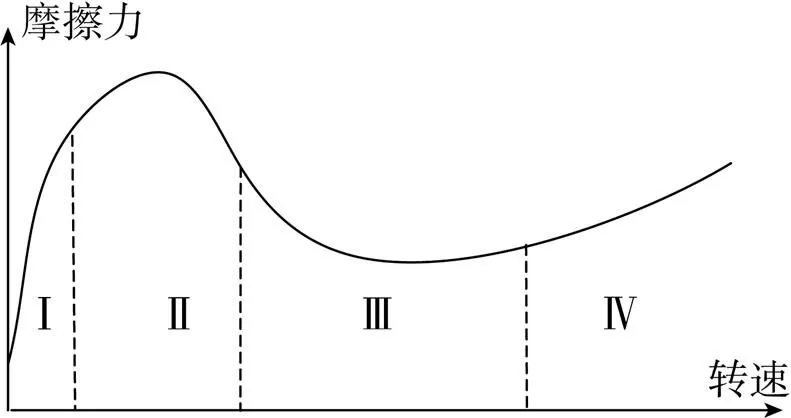
图1 Stribeck曲线

图2 LuGre摩擦模型
LuGre模型是依据速度值来计算的摩擦力。LuGre摩擦力矩模型的表达式如下
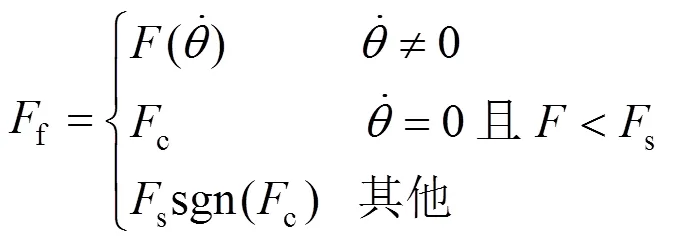
扫描机构支撑方式采用轴承支撑。在轴承滚珠与保持架接触过程中,会产生不规则的微观接触面,进而引起弹性偏斜,形成摩擦力矩。以弹性偏斜作为指标考察摩擦力矩,定义平均偏斜程度为,则有

式中
已知刚性接触的摩擦力矩描述如下
考虑粘性摩擦的影响,则扫描机构的最终摩擦力矩表现为



综上所述,摩擦力矩与扫描速度相关,将LuGre摩擦力矩模型引入控制器实际即可实现非线性摩擦力矩的补偿。为了在不同速度下实现更准确的控制,采用自抗扰技术改进PID控制器设计,以实现多模式下的控制参数调整。
2 非线性PID控制器设计
传统的PID控制器,因其物理意义显著、参数数量较少等优点,在工程应用中具有广泛的应用领域。PID控制器的设计思想是基于输入输出误差,采用误差、误差积分及误差微分的“加权和”实现控制器设计。随着控制精度要求的不断提高,PID控制器表现出一定的局限性,进而引发对PID控制器设计的进一步探索与思考,如输入输出误差的跳变会引起控制输出的突变、加权和策略的有效性等。为了适应不同场景应用,尽可能发挥PID控制算法的优势,基于PID优化控制算法不断被提出[15-19]。由于实际应用中,被控对象模式获取困难或者无法达到理想的精度,无模型控制算法成为研究的一个重要分支。自抗扰技术的提出,主要为了解决PID控制器设计过程存在的问题,实现PID控制器的优化。其核心思想包括:1)安排合适的“过渡过程”,以平滑误差的跳变;2)合理提取“微分-跟踪微分器”(Tracking Differentiator,TD),以最快地跟踪输入指令;3)探讨合适的非线性组合(NF),优化加权和策略;4)探讨“扰动估计”办法,即“扩张状态观测器”(ESO),旨在同时解决系统内扰动和外部扰动问题[20-23]。
从自抗扰控制核心技术可知,结合扫描机构运动特性,通过合理的自抗扰控制设计,能够提高控制精度,使得扫描机构运动性能进一步提高。本文旨在探讨自抗扰技术对空间扫描运动机构PID控制器设计的有效性。基于自抗扰技术的非线性PID控制器设计步骤如下。
(1)安排过渡过程
由于扫描运动机构的速度属于低速扫描,且扫描非线性过程属于平滑换向,系统不存在突变形式的输入量需要控制。在扫描机构中,利用旋转变压器作为角度反馈元件。为了获得扫描轴系的转速,需要根据采集的角度数据进行估计。

其单位阶跃响应trns()为
(2)跟踪-微分控制器
最快控制综合函数fst的提出,为离散系统的信号处理和控制提供了有效方法[21]。自抗扰技术利用fst函数,代替PID控制器中的微分功能,实现最快的控制器跟踪。自抗扰技术的“跟踪-微分器”离散形式如下



(3)非线性控制器
通过不断的工程实践,发现PID控制器中的加权和策略并不是最优的方式,自抗扰技术探索了非线性的组合方式对该策略进行优化。将经典PID的加权和形式利用fal()函数描述其非线性如下
基于摩擦力矩估计的非线性控制器框图如图3所示。首先考虑速度环控制,以此为基础在速度环外再设计位置环控制器。考虑速度环的跟踪控制时,由于系统输出变量为扫描角度,系统中无角速度传感器,因此需要对角速度进行实时估计以用于反馈,同时对摩擦力矩进行实时估计以用于补偿。
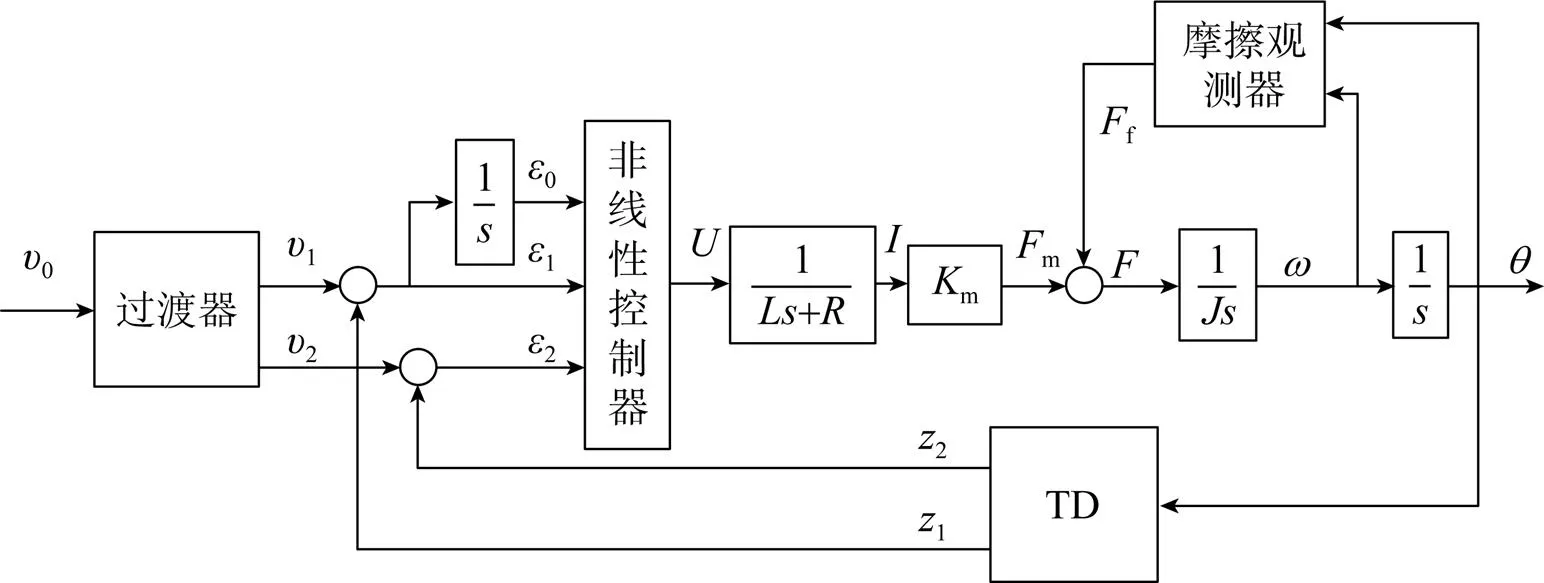
图3 基于自抗扰控制器的非线性比例、积分和微分控制器
自抗扰技术的非线性组合如下

3 仿真分析
3.1 算法仿真验证

为了考察微分-跟踪微分器的作用效果,输入阶跃信号,仿真得到结果微分-跟踪微分器后的信号如图4所示。由图4可知,经过微分-跟踪器后的阶跃信号能够快速收敛,且超调量控制在3%以内。将该结果带入控制系统模型进行仿真分析。
为了验证摩擦力补偿的有效性,图5和图6分别为无摩擦力补偿时和引入摩擦力模型补偿后,扫描系统经过了安排过渡控制环节得到的实际角位置和输入位置指令对比。
对比图5、图6可知,在起始时刻,由于低速时摩擦力矩的非线性特性,引入摩擦力模型补偿后,扫描系统对输入指令的跟踪优于无摩擦补偿时的性能。
采用摩擦模型摩擦力矩补偿后,实际角位置与过渡过程角位置之间的误差如图7所示。扫描系统的位置误差在±1.1″以内。
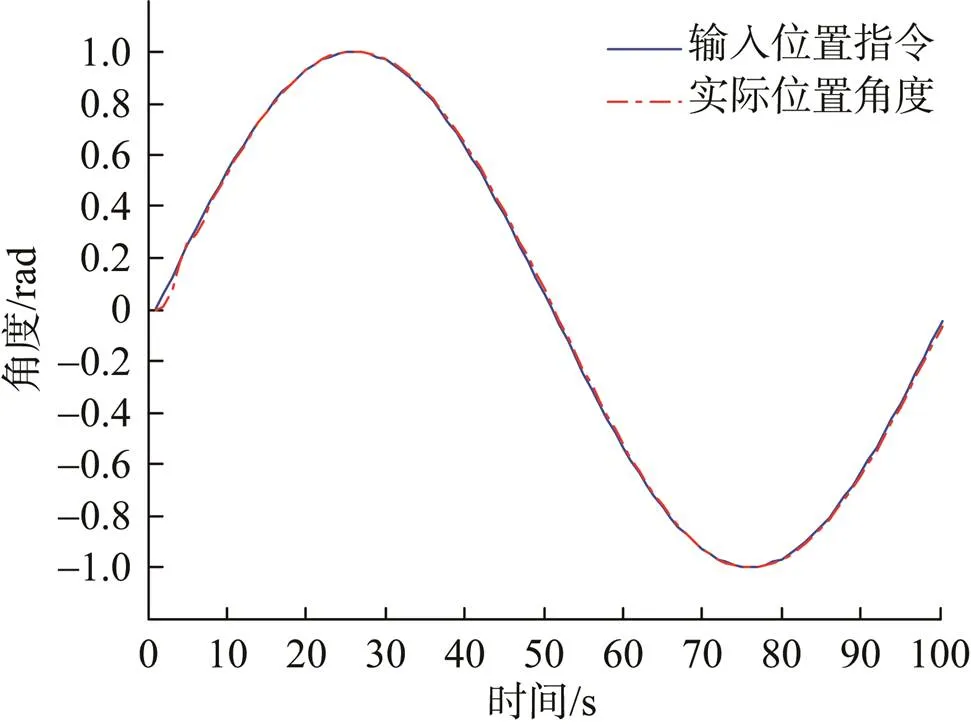
图6 摩擦力补偿后实际角位置与输入角位置
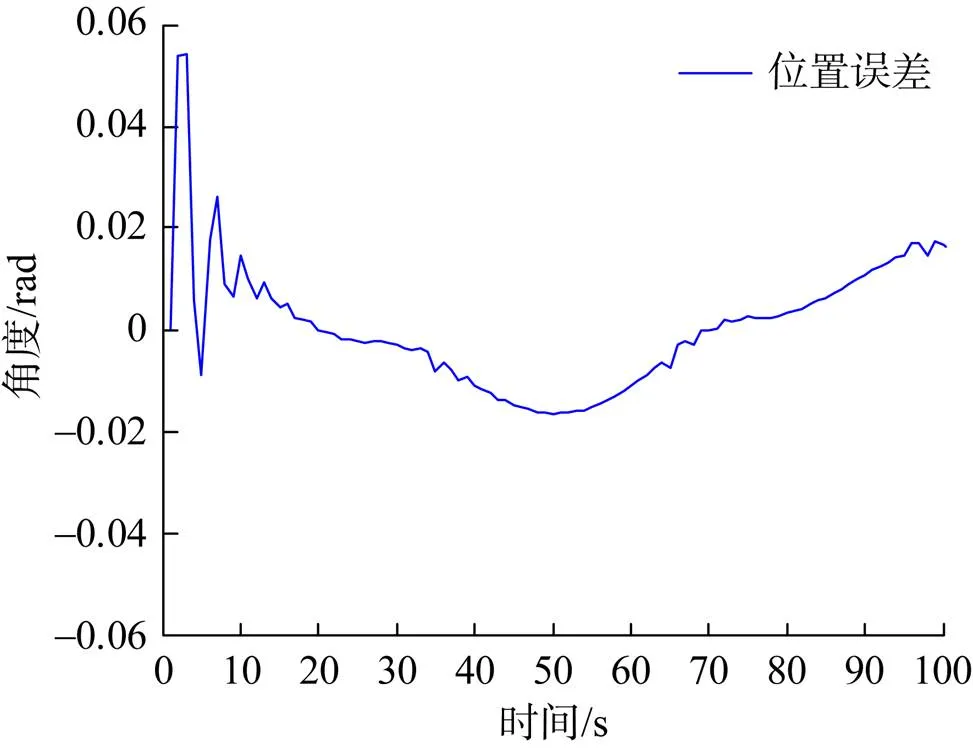
图7 实际角度与输入角度的差值
3.2 多模式仿真验证
为了验证任务书要求的各模式下的控制精度,本文通过仿真对不同的扫描范围和扫描速度的控制结果进行验证。以主工作模式(扫描范围为10°,扫描速度为5°/s)为例,图8为主工作模式下的扫描系统控制仿真结果。由图8可知,在整个扫描过程中,扫描角度误差均能控制在±1″以内。图9为扫描范围为10°,扫描速度为1°/s的扫描系统控制结果。
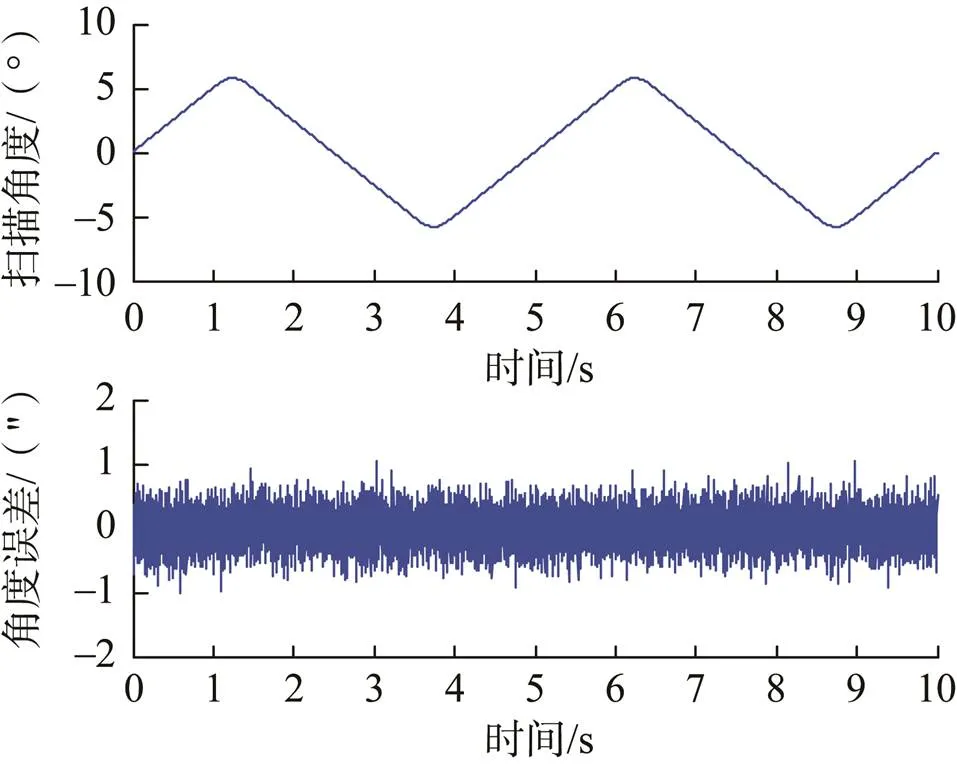
图8 扫描角度误差(扫描速度为5°/s)
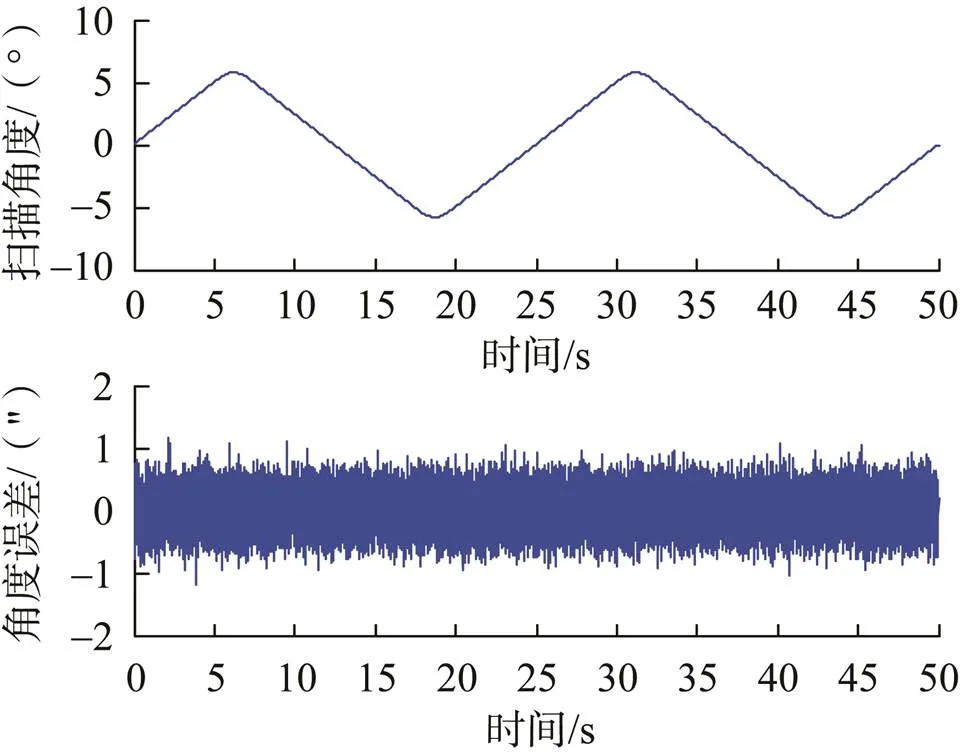
图9 扫描角度误差(扫描速度为1°/s)
对比不同速度下的仿真结果可知,本文提出的引入摩擦力补偿的自抗扰控制方法能够保证扫描系统的精度控制在要求范围内。针对各模式下的仿真结果如表2所示。
表2 各工作模式下的控制精度
由以上结果可知,扫描控制系统各工作模式下的控制精度均在1″左右。对比同一扫描范围、不同速度下的结果,扫描速度为1°/s时的扫描角度误差略优于扫描速度为5°/s的扫描角度误差。
4 结束语
本文针对多模式空间扫描系统的控制问题,提出了结合自抗扰技术的非线性PID控制器设计。
依据扫描机构链路分析及摩擦力矩模型与扫描机构运动转速相关性,引入LuGre摩擦力矩模型补偿非线性摩擦力矩对扫描控制的影响。将输入的指令通过安排过渡过程,转换为位置指令和速度指令;设计微分-跟踪控制器,提高系统的响应速度;采用非线性的组合形式,完成PID控制器设计。通过仿真实验,说明了引入摩擦力矩模型后,扫描系统对输入的跟踪性能优于无摩擦力矩补偿时的性能,且满足多模式下的扫描机构控制精度。
本文提出方法的实际应用效果需要进一步验证,针对不同被控对象,需要对优化摩擦力矩模型进行迭代和优化,保证摩擦力矩模型的有效性,这是后续需要进一步开展研究的方向,也是实现算法实际应用的必备途径。
[1] 杨磊. 高精度摆动扫描技术研究[D]. 长沙: 国防科技大学, 2005: 1-4. YANG Lei. Research on High Precison Swing Scanning Technology[D]. Changsha: Ntional University of Defense Technology, 2005: 1-4. (in Chinese)
[2] 李婧, 张艾, 王淳. 空间望远扫描控制系统的电流环设计与仿真[J]. 航天返回与遥感, 2020, 41(5): 72-82. LI Jing, ZHANG Ai, WANG Chun. Design and Simulation of Current Loop for the Space Telescope Scanning Control System[J]. Space Recovery & Remote Sensing, 2020, 41(5): 72-82. (in Chinese)
[3] 王自力. 基于DSP与FPGA的扫描控制系统研究与设计[D]. 上海: 上海交通大学, 2009: 12-17. WANG Zili. The Research and Design of Scanning Control System Based on DSP and FPGA[D]. Shanghai: Shanghai Jiao Tong University, 2009: 12-17. (in Chinese)
[4] 阎彦, 刘锐, 史婷娜, 等. 基于反推自适应控制的永磁同步电机摩擦力矩补偿策略[J]. 中国电机工程学报, 2013, 33(33): 76-84. YAN Yan, LIU Rui, SHI Tingna, et al. Friction Compensation for Permanent Magnet Synchronous Motors Based on Adaptive Back-stepping Control[J]. Proceedings of the CSEE, 2013, 33(33): 76-84. (in Chinese)
[5] 吴盛林, 刘春芳. 超低速高精度转台中摩擦力矩的动态补偿[J]. 南京理工大学学报, 2002, 26(4): 393-396. WU Shenglin, LIU Chunfang. Friction Dynamic Compensation for a Simulator with Ultra-low Speed and High Precision[J]. Journal of Nanjing University of Science and Technology, 2002, 26(4): 393-396.(in Chinese)
[6] 叶超, 崔宁豪, 马正雷, 等. 基于LuGre模型的伺服系统摩擦补偿策略研究[J]. 微电机, 2019, 52(5): 53-56. YE Chao, CUI Ninghao, MA Zhenglei, et al. Research on Friction Compensation Strategy of Servo System Based on LuGre Model[J]. Micro Motors, 2019, 52(5): 53-56. (in Chinese)
[7] 李拥军, 杨文淑, 范永坤, 等. 高精度转台摩擦力矩补偿控制器设计与仿真[J]. 光电工程, 2008, 35(12): 126-130. LI Yongjun, YANG Wenshu, FAN Yongkun, et al. Controller Design and Simulation for Friction Moment Compensation on High-precision Turntable[J]. Opto-Electronic Engineering, 2008, 35(12): 126-130. (in Chinese)
[8] 朱志昆, 马晓军, 李长兵, 等. 坦克全电式炮控系统低速分析和控制[J]. 兵工学报, 2011, 32(8): 1014-1018. ZHU Zhikun,MA Xiaojun,LI Changbing,et al. The Analysis and Control of Low Speed of All-Electric Tank Gun Control System[J]. Acta Armamentarii, 2011, 32(8): 1014-1018. (in Chinese)
[9] PIATKOWSKI T. Dahl and LuGre Dynamic Friction Models—The Analysis of Selected Properties[J]. Mechanism and Machine Theory, 2014, 73: 91-100.
[10] 吕娴娜, 刘银年. 基于摩擦观测器的伺服控制系统研究及仿真[J]. 测控技术, 2012, 31(11): 60-63. LYU Xianna, LIU Yinnian. Research and Simulation of Servo Control System Based on Friction Observer[J]. Measurement & Control Technology, 2012, 31(11): 60-63. (in Chinese)
[11] 徐春梅. 机械伺服系统基于模糊神经网络的复合控制[J]. 控制工程, 2010, 17(2): 146-153. XU Chunmei. Complex Control Based on Fuzzy Eneural for Mechanical Servo Systems[J]. Control Engineering of China, 2010, 17(2): 146-153. (in Chinese)
[12] 张德成, 马克茂. 飞行仿真转台系统摩擦补偿方法研究[C]//第29届中国控制大会, 7月29日, 2010, 北京. 北京: 中国自动化学会, 2010: 3411-3416. ZHANG Decheng, MA Kemao. On Friction Compensation Method of Flight Simulation Turntable Systems[C]//CCC’10, July 29, 2010, Beijing. Beijing: CAA, 2010: 3411-3416. (in Chinese)
[13] ARMSTRONG B, DUPONT P, CANUDAS C. A Survey of Models, Analysis Tools and Compensation Methods for the Control of Machines with Friction[J]. Automatica, 1994, 30(7): 1083-1138.
[14] 杨帆. 基于LuGre摩擦模型的伺服系统自适应鲁棒控制研究[D]. 南京: 南京理工大学, 2012. YANG Fan. Research on Servo System Adaptive Robust Control Based on LuGre Friction Model[D]. Nanjing: Nanjing University of Science and Technology, 2012. (in Chinese)
[15] 王恺, 刘兆军. 摆动扫描的迭代学习控制系统研究[J]. 航天返回与遥感, 2008, 29(1): 34-38. WANG Kai, LIU Zhaojun. Iterative Learning Control System of Scan for Oscillating Mirror[J]. Space Recovery & Remote Sensing, 2008, 29(1): 34-38. (in Chinese)
[16] 郭兰杰, 王浩, 王淳, 等. 基于改进型重复控制的光程扫描控制系统设计[J]. 航天返回与遥感, 2019, 40(1): 32-40. GUO Lanjie, WANG Hao, WANG Chun, et al. Optical Path Scanning Control System Based on Modified Repetitive Control[J]. Space Recovery & Remote Sensing, 2019, 40(1): 32-40. (in Chinese)
[17] DUAN Haibin, WANG Daobo, YU Xiufen. Novel Approach to Nonlinear PID Parameter Optimization Using Ant Colony Optimization Algorithm[J]. Journal of Bionic Engineering, 2006, 3: 73-78.
[18] MASANOBU N, DAISUKE I, TAKUYA I, et al. The Application of a PID Parameter Tuning Method Based on Model Matching on Frequency Domain for Printer Ink-head Speed Control[C]//2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, July 4-17, 2009, Singapore. IEEE, 2019: 256-262.
[19] 贾鹏霄, 李恩, 梁自泽, 等. PD自适应控制结合输入整形抑制单模态弹性机构振动研究[J]. 振动与冲击, 2013, 32(17): 189-193. JIA Pengxiao, LI En, LIANG Zize, et al. Adaptive PD Control Combined with Input-shaping for Suppressing Vibration of a Single-mode Flexible Mechanism[J]. Journal of Vibration and Shock, 2013, 32(17): 189-193. (in Chinese)
[20] 韩京清. 自抗扰控制技术[J]. 前沿科学, 2007, 1(1): 24-31. HAN Jingqing. Auto Disturbances Rejection Control Technique[J]. Frontier Science, 2007, 1(1): 24-31. (in Chinese)
[21] 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3): 13-18. HAN Jingqing. From PID Technique to Active Disturbances Rejection Control Technique[J]. Control Engineering of China, 2002, 9(3): 13-18. (in Chinese)
[22] 宋金来, 甘作新, 韩京清. 自抗扰控制技术滤波特性的研究[J]. 控制与决策, 2003, 18(1): 110-119. SONG Jinlai, GAN Zuoxin, HAN Jingqing. Study of Active Disturbance Rejection Controller on Filtering[J]. Control and Decision, 2003, 18(1): 110-119. (in Chinese)
[23] 黄焕袍, 万晖, 韩京清. 安排过渡过程是提高闭环系统“鲁棒性、适应性和稳定性”的一种有效方法[J]. 控制理论与应用, 2001, 18(S1): 89-94. HUANG Huanpao, WAN Hui, HAN Jingqing. Arranging the Transient Process is an Effective Method Improved the “Robustness, Adaptability and Stability”of Closed-Loop System[J]. Control Theory and Applications, 2001, 18(S1): 89-94. (in Chinese)
A Scanning Control Method Based on the Active Disturbance Rejection Technique
DONG Jie1CHI Dongnan1XU Lina1ZHANG Dong1ZHU Jun2
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)(2 Aerospace Dongfanghong Satellite Co. Ltd., Beijing 100094, China)
A nonlinear PID controller based on the active disturbance rejection control (ADRC) technique is proposed to solve the control problem for the space scanning mechanism under the condition of multiple working modes. According to the working requirements of scanning optical remote sensing, the working modes include several combinations of different scanning ranges and velocity levels, that is, multiple velocity levels with a constant scanning range and two scanning ranges with a constant velocity. Due to the high control accuracy requirement for the scanning mechanism, it is impossible for a group of control parameters to obtain the required performance in different modes. Analyzing the mechanical chain shows that the friction torque, nonlinear in different working modes, is a crucial influence factor for performance control. Therefore, a friction torque model is introduced to the control system to compensate nonlinear disturbance, and a nonlinear PID controller combined with ADRC technique is proposed to implement the accuracy control. Both the simulations of the proposed algorithm and the simulations for a scanning system in multiple modes are implemented. The simulation results show that the proposed method in this paper is effective for the scanning system to realize high control accuracy.
multi-mode scanning mechanism; friction compensation; active disturbance rejection control technique; nonlinear PID control; aerospace optical remote sensing
TP217.3
A
1009-8518(2023)04-0029-10
10.3969/j.issn.1009-8518.2023.04.004
2022-11-14
科工局民用航天项目(D010206)
董杰, 迟冬南, 徐丽娜, 等. 基于自抗扰技术的扫描机构控制[J]. 航天返回与遥感, 2023, 44(4): 29-38.
DONG Jie, CHI Dongnan, XU Lina, et al. A Scanning Control Method Based on the Active Disturbance Rejection Technique[J]. Spacecraft Recovery & Remote Sensing, 2023, 44(4): 29-38. (in Chinese)
董杰,男,1976年生,2008年获国防科学技术大学航空宇航科学与技术专业硕士学位,高级工程师。主要研究方向为空间遥感器总体设计技术。E-mail:maildongjie@sina.com。
(编辑:庞冰)
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:04
中学生数理化·八年级物理人教版(2021年3期)2021-07-22 03:19:00
数学物理学报(2021年2期)2021-06-09 08:54:26
数学物理学报(2019年5期)2019-11-29 07:46:34
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
创新作文(1-2年级)(2016年4期)2016-05-14 19:33:03
航天制造技术(2016年6期)2016-05-09 08:32:51