汽车ESC系统干预转向不足性能测评与研究*
2023-09-04 08:10:18牛成勇吴昆伦王戡苏占领周祥祥
汽车文摘 2023年9期
牛成勇 吴昆伦 王戡 苏占领 周祥祥
(1.招商局检测车辆技术研究院有限公司 国家智能网联汽车质量检验检测中心(重庆),重庆401329;2.汽车主动安全测试技术重庆市工业和信息化重点实验室,重庆401329;3.自动驾驶系统及智能网联汽车技术研发与测试应用重庆市工程研究中心,重庆401329)
0 引言
汽车电子稳定性控制系统(Electronic Stability Control,ESC)是一种辅助驾驶员有效控制车辆的主动安全设备,其通过对车轮制动力和发动机输出扭矩进行调整,限制车辆侧偏角发生急转,并保证车辆侧偏角始终处于一定范围内,以获得足够的横摆力矩增益。据美国高速公路交通安全局(NHTSA)的分析数据表明,使用ESC 能减少34%的乘用车和59%的SUV单车碰撞事故,还可有效地预防71%的乘用车和84%的SUV翻车事故[1-2]。
目前,随着汽车智能化、电动化的不断发展以及消费者对车辆安全性的关注日益提高,加之国家相关标准法规的陆续发布、实施,ESC系统已大量装备于汽车上,其在行车安全上的优势已被全球汽车生产厂家和汽车使用者认可,使其成为继ABS 技术之后,保护车内驾乘人员生命安全非常重要的主动安全技术[3-4]。
鉴于不同ESC生产企业的ESC控制策略差异所带来的系统性能优劣性,装备ESC系统的车辆必须满足法规规定试验的性能要求,以保证其对车辆极限工况下出现的转向过度(后轴侧滑)、转向不足(前轴侧滑)问题有足够的干预,使车辆进入稳定工况。然而,在国内外ESC性能测试及评价体系中只涉及系统对车辆过度转向的控制性能测试,均未对极限工况(或危险工况)下ESC干预转向不足的性能试验及评价指标作明确规定。也就是说,如何有效解决车辆在极限工况(或危险工况)的转向不足,并制定合理的评价指标,评价ESC系统转向不足控制性能在国内外尚属于空白领域。
根据国内外ESC系统测试与评价研究现状,其在干预转向不足性能测试技术方面主要存在以下3个问题:
(1)试验方案的合理性
NHTSA 实施的正弦延迟试验(Sine With Dwell,SWD)能较好地评价系统对过度转向的干预性能,而对转向不足的干预性能却无能为力。在低附着系数路面上更容易激发出车辆严重的转向不足趋势,但试验结果很难明确地对ESC 控制转向不足的性能进行评价。因此,制定合理的试验方案是评价ESC 控制转向不足性能的关键。
(2)评价指标的客观性
针对可能激发出车辆严重转向不足的试验工况,如冰雪路面上的双移线或稳态回转试验,都会受驾驶员输入的影响,很难对ESC 性能进行定量评价。即使根据经验选取一些评价指标,但其评价指标是否客观、合理,有待于试验验证和进一步考量。因此,制定客观的评价指标是评价ESC控制转向不足性能的重点。
(3)试验场地的规范性
目前,在国内符合法规标准要求的ESC 试验场地主要由企业建设,存在一些诸如路面附着系数测定方面问题。尽管在低附着系数路面(如冰雪路面、洒水路面)更容易激发出车辆因转向不足而引发的前轴侧滑,但是缺乏相关的标准试验场地开展转向不足试验研究和验证工作。因此,建立规范的试验场是评价ESC控制转向不足性能的基础。
1 ESC系统对车辆横摆稳定性的影响
ESC 系统能通过传感器信号准确识别车辆行驶状态,预估不稳定状态,并通过限制发动机扭矩输出及控制各车轮与地面的附着力,实现对转向不足和过度转向的干预,达到修正转向、调整车辆不稳定姿态的控制效果[5-8]。
当车辆出现如图1 所示的转向不足工况或趋势时,ESC 系统将对车辆后轴内侧车轮4实施制动,产生一个顺时针方向的附加横摆力矩,使车辆沿驾驶员的期望路径偏转。具体原理是,在轮胎与路面极限附着工况下,车轮所受的纵向力与侧向力的合力基本不变。当ESC系统增加某一车轮的制动力FB时,势必会导致该车轮受到的侧向力FS减小,在其它车轮所受地面侧向力基本不变的情况下,最终引起4 个轮胎的合力转动,即对车身产生了一个补偿横摆力矩,如图2所示。其中,V为车辆前进方向速度;α为轮胎侧偏角;λ为滑移率;δ为车轮转角;FS(λ0)、FB(λ0)、FR(λ0)分别为滑移率为λ0时,轮胎所受地面的侧向力、纵向力和合力。
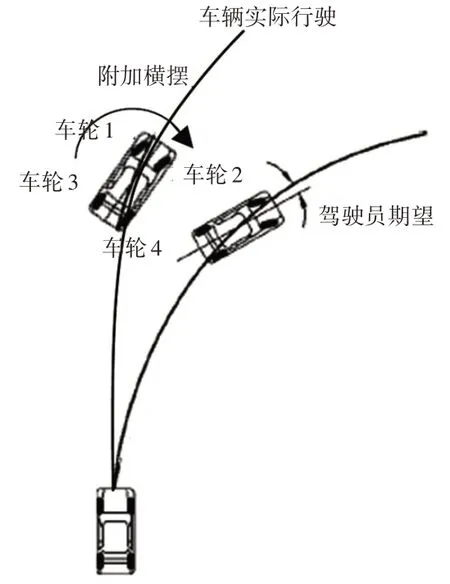
图1 ESC系统工作原理

图2 单个轮胎受力分析
当单独制动车轮4不足以改变车辆的转向不足状态时,系统将通过制动其它车轮或降低发动机输出扭矩来满足要求。
2 某商用车ESC系统联合仿真分析
2.1 基于ADAMS/Car建立整车模型
2.1.1 整车模型简化
简化原则为:
(1)将除轮胎、弹簧、阻尼元件等柔性体外的其余部件均按刚性体处理。
(2)忽略零部件之间的摩擦力影响。
(3)车身质量简化在整车质心位置[9-10]。
2.1.2 搭建整车子系统模型
根据表1所列的国内某商用车(营运客车)关键性能参数,利用ADAMS/Car 软件的模板生成器,依次建立前悬架模型、后悬架模型、转向系统模型、轮胎模型、动力系统(发动机)模型、制动系统模型以及路面模型并建立各子系统之间的通讯器。
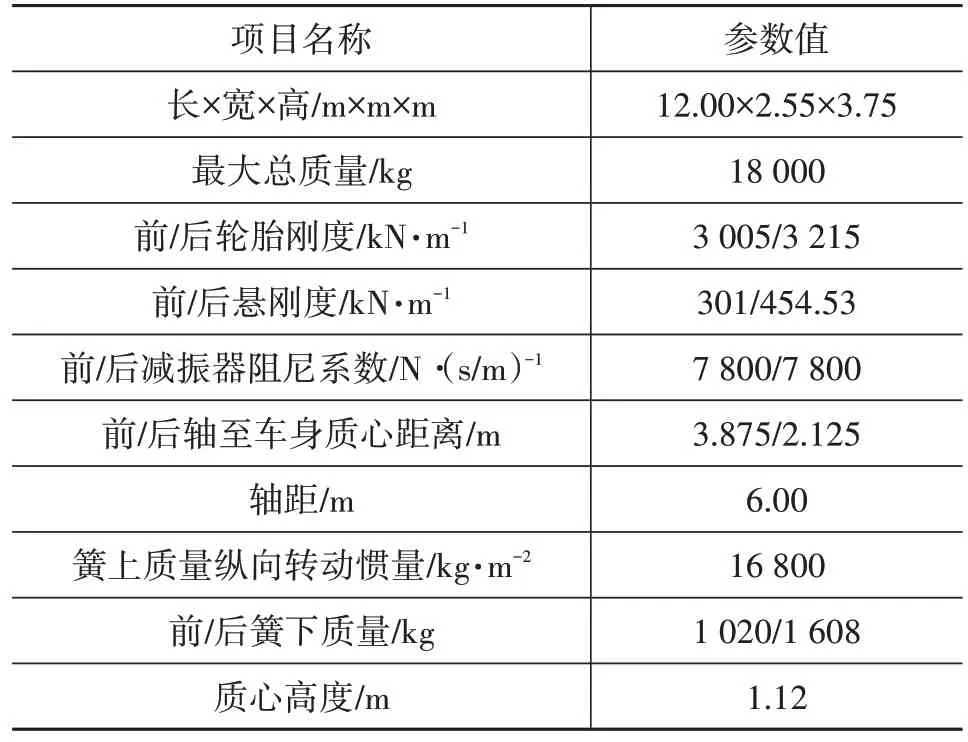
表1 国内某商用车性能关键参数表
2.1.3 整车模型装配及调试验证
将搭建好的各大子系统模型进行组装和调试,从而装配成整车动力学仿真模型,如图3所示。

图3 整车模型
利用建立好的整车模型进行MATLAB/Simulink联合仿真。按表1 配置的整车进行了试验,试验工况采用与仿真相同的工况。将仿真结果与试验结果进行对比,以检验整车模型的合理性、准确性。本文采用的是蛇形仿真来检验整车模型。对于大型商用车而言,满载试验时,蛇行试验标准场景要求标桩间距为50 m,试验车速为50 km/h。车辆横摆角速度和车身侧倾角的仿真与试验对比结果如图4和图5所示。
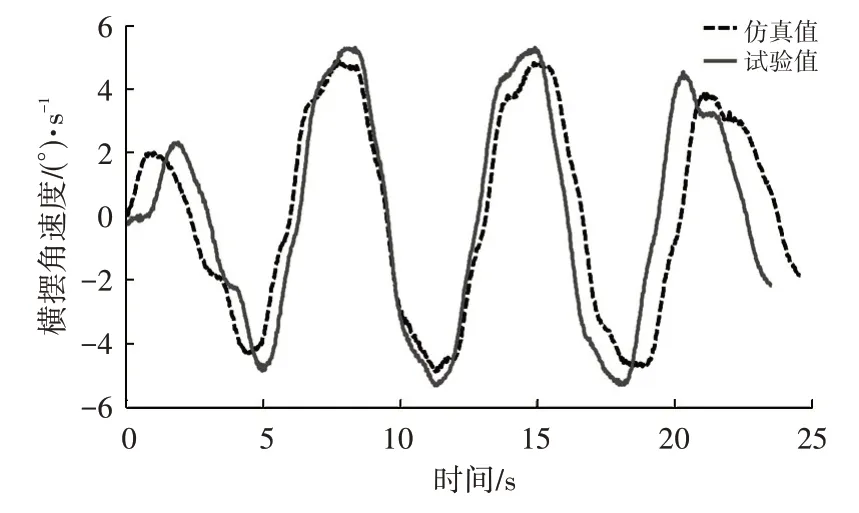
图4 横摆角速度响应对比

图5 车身侧倾角响应对比
通过对比结果可知,横摆角速度和车身侧倾角参数在模型仿真和实车试验中数值差别较小,在合理的可接受范围内,从而证明该模型具有一定的准确性,为后续的进一步联合仿真分析奠定了基础。
2.2 基于MATLAB/Simulink建立ESC控制系统
针对ESC 系统控制特点,为了更精确地控制汽车行驶状态,采用横摆角速度ω和质心侧偏角β作为控制输入量,采用PID 控制方法,分别设计2 个PID 控制器,经过加权后形成联合控制器,输出量为横摆力矩[10],其控制系统框如图6所示。
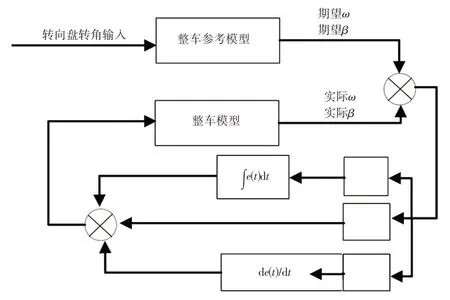
图6 整车PID控制
在Simulink 中建立基于PID 控制的ESC 仿真模型,如图7所示。
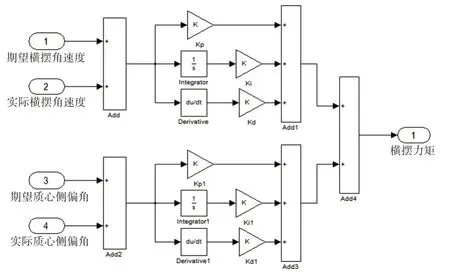
图7 整车PID控制器模块
2.3 基于PID控制的某商用车ESC性能联合仿真
整个联合仿真系统由3 部分构成:ADAMS/Car 整车模型、整车参考模型和控制系统,如图8所示。
结合ADAMS/Car整车模型和控制系统,经反复仿真验证,采用如下方法可以较容易激发车辆转向不足趋势,并能有效验证ESC系统的干预控制能力:
(1)在路面附着系数为0.3(低附着系数路面)上进行“双移线”行驶工况。
(2)车辆满载时载荷布置方式为“前轻后重”(前后轴荷比为0.35)。
在选取50 km/h 的仿真速度环境下,车辆进行“双移线”试验。在ESC 系统开启和关闭2 种状态下行驶轨迹对比如图9所示。
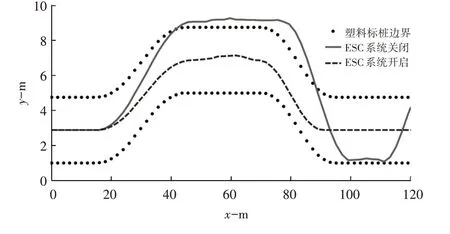
图9 车辆行驶轨迹
通过ADAMS 和Simulink 联合仿真结果可以看出,在低附着系数路面、整车载荷差异性布置(质心后移)的测试条件下,双移线试验可激发车辆转向不足。ESC 系统能有效地对车辆在危险状况下的转向不足进行干预控制,提高变道行驶安全性。
该仿真结果在一定程度上说明了本文所提出的激活车辆转向不足趋势的方法及考察ESC 系统的干预转向不足性能是可行的,为后续实车测试验证提供了支撑。
3 某商用车ESC系统性能实车测评
3.1 ESC性能测试系统介绍
目前应用于ESC性能测试系统如图10所示,主要包括以下部分:
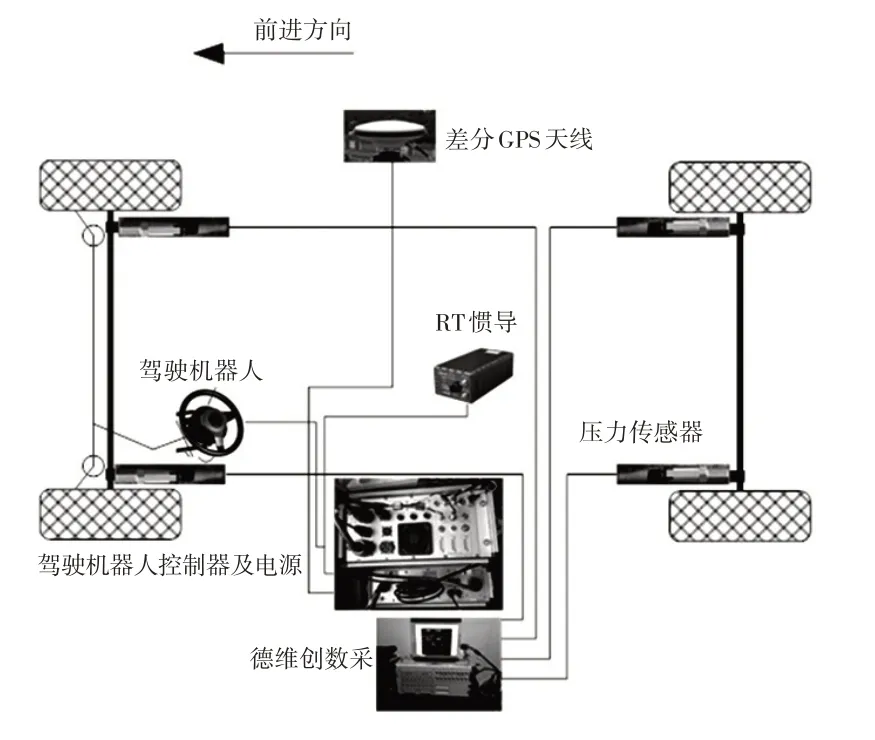
图10 ESC性能测试系统组成示意
(1)驾驶机器人:可精确控制车辆,按设定路径、角度行驶;控制车辆行驶车速的稳定性以保障测试结果一致性。
(2)组合惯导系统:可实现车辆相关动态参数的高精度实时测量,并保证定位精度达到厘米级。
(3)德维创数据采集系统:可采集制动气室压力和发动机扭矩、转速信息。
3.2 ESC干预转向不足性能测评方法
3.2.1 测试方法概述
车辆满载且前后轴荷比为0.35。按照图11 所示的测试场景,在低附着系数路面上布置标志桩,且确保ESC 关闭装置正常,测试在ESC 开启和关闭2 种状态下分别进行。
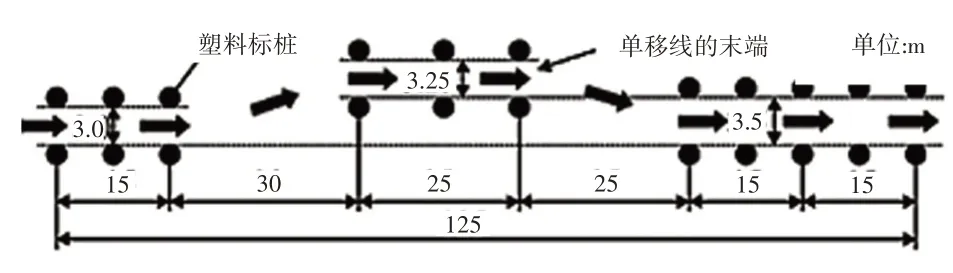
图11 双移线测试场景示意
为保证测试安全,测试从30 km/h 的车速开始,以5 km/h 的幅度逐步增加测试车速。如果车辆在通过测试通道过程中,未接触任何标志桩,也未偏离测试通道,则认为测试有效。否则,终止测试。
测试过程中,将车辆运行轨迹控制在双移线轨道中。在第1 个标志桩处保持加速踏板位置不变,并触发记录该瞬间的车速,且全程不采取制动操作(除非车辆达到失稳状态),仅通过调整转向盘来控制车辆。
3.2.2 评价指标
在低附着系数路面下的双移线避障行驶工况中,能够在不触碰标志桩,且不偏离行驶轨迹的前提下,“进入(入口)车速”的高低能直接体现ESC 对车辆转向不足的控制性能。
3.3 实测验证分析
以某商用车(营运客车)为测试样车,以驾驶机器人控制行驶路径和车速,在低附着系数路面上完成“双移线”验证测试,如图12所示。

图12 测试样车及测试设备
经实测发现,在ESC系统开启和关闭2种状态下,车辆的最高入口车速分别为55.6 km/h 和43.0 km/h,即车辆在装备ESC 系统后的操纵稳定性改善程度(最高入口车速改变量)为:
式中,φ为操纵稳定性改善程度;VmaxESC ON为ESC 系统开启时的最高入口车速;VmaxESC OFF为ESC 系统关闭时的最高入口车速。
车辆在入口车速为43 km/h、ESC系统开启和关闭2种状态下的行驶轨迹、横摆角速度、侧向加速度对比参数分别如图13~图15 所示。在ESC 系统开启时,车辆各车轮制动气压值如图16所示。
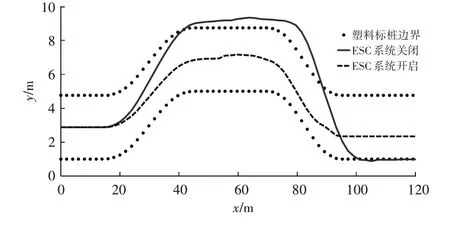
图13 车辆行驶轨迹
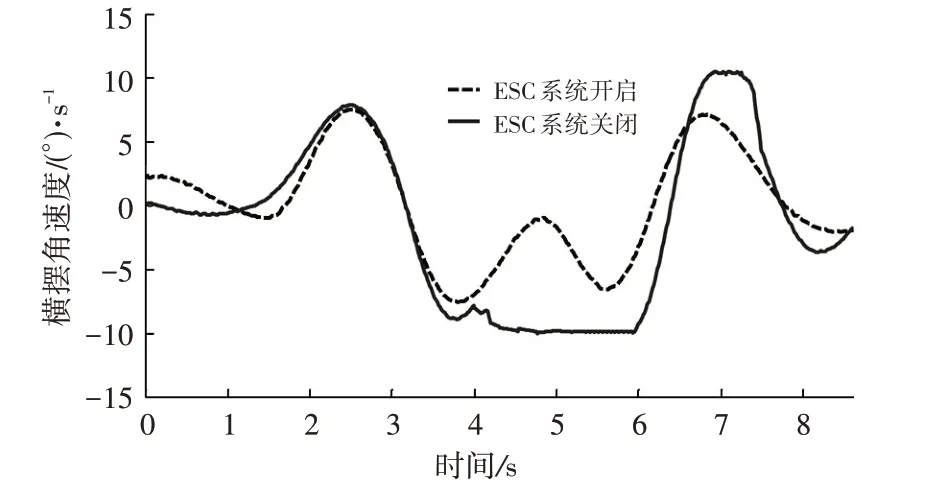
图14 车辆横摆角速度
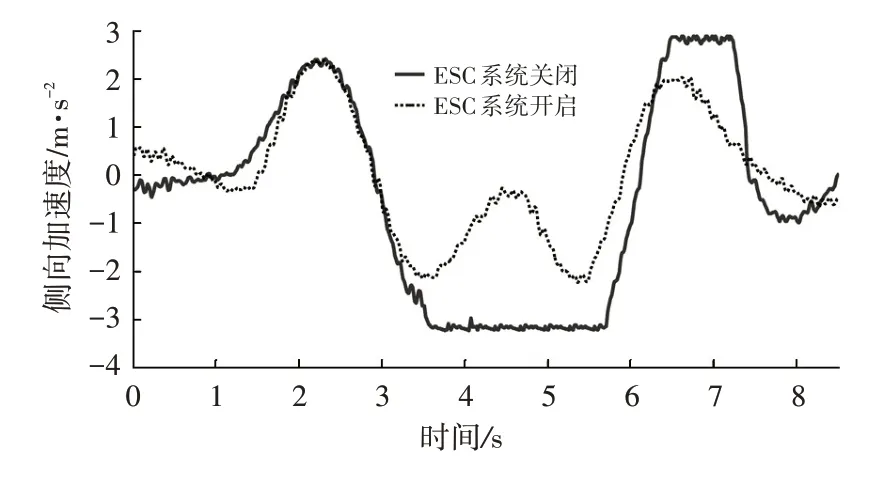
图15 车辆侧向加速度
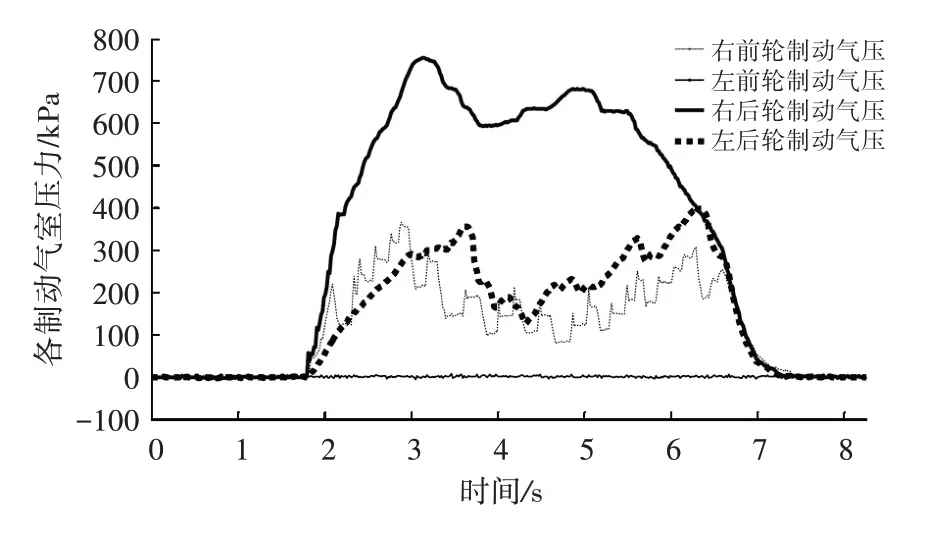
图16 ESC功能开启时的车轮制动气压
从图13~图15 的对比参数及图16 中的各车轮制动气室压力可以看出,在ESC 系统失效状态下,车辆的实际运动轨迹已经明显偏离期望运动轨迹,表现为明显的转向不足。横摆角速度、侧向加速度峰值及相应的持续时间也明显增大,车辆即将失控的态势表现明显。与之相反,车辆在ESC 系统作用下,右后轮制动气室压力值(制动气压峰值约为750 kPa)明显大于其它车轮制动气室压力值,根据前述理论分析可知,车辆便获得一个较大的附加横摆力矩,使其转向不足趋势得到有效控制,路径跟随能力明显改善。
4 结束语
结合联合仿真结果和实车测试数据可以看出,当车辆载荷进行“前轻后重”式的差异性布置,在低路面附着系数的测试条件下,通过“双移线”变道试验可有效激发车辆转向不足趋势,且ESC 系统可有效控制因转向不足趋势而带来的失控风险。
因此,本文所提出的针对车辆ESC 控制转向不足性能的测评方法,能凸显ESC 系统转向不足失控控制性能,完善了ESC测试评价体系。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
小读者(2019年24期)2020-01-19 01:51:36
疯狂英语·新悦读(2019年11期)2019-12-18 05:14:16
汽车观察(2019年2期)2019-03-15 06:00:34
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
专用汽车(2015年4期)2015-03-01 04:10:02
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:31
噪声与振动控制(2015年4期)2015-01-01 07:08:09
客车技术与研究(2014年1期)2014-03-20 14:34:48