基于IGWO-BP 神经网络的车内声品质预测
2023-09-02 06:35:44王楷焱
沈阳理工大学学报 2023年5期
刘 松,陈 克,王楷焱
(沈阳理工大学汽车与交通学院,沈阳 110159)
由于电动汽车没有传统内燃机噪声的掩蔽效应,动力总成系统中电机与变速器高频噪声变得较为突出[1],其比传统燃油汽车驱动系统的噪声更易引起人体不适,纯电动汽车车内声压级水平虽低,但是电机产生的电磁噪声却影响着人们的驾乘感受,仅凭A 声级已经不足以反映驾乘人员对车内噪声的主观感受[2]。
目前常用多元线性回归模型[3]、BP 神经网络模型[4]对纯电动汽车声品质展开预测,其中多元线性回归模型是线性的,但人耳对声音的主观感受过程是非线性的,因此线性模型预测通常达不到理想精度。 此外BP 神经网络预测模型对初值过于敏感、易陷入局部最优和收敛速度慢等问题,模型预测精度偏低。
灰狼优化算法在最优解方面已经被证明相较遗传算法和其他智能启发式算法有更优的收敛速度和求解精度[5],本文选取改进后的灰狼算法(Improved Gray Wolf Optimization,IGWO)对BP神经网络进行优化,提高模型收敛速度,协调其全局搜索和局部搜索性能,建立基于IGWO-BP 的神经网络车内声品质预测模型。
1 车内噪声的采集及主观评价试验
1.1 车内噪声信号的采集
本文试验采集某国产电动汽车驾驶员右耳处和车辆后排座位中心处的噪声信号。 试验参照GB/T 18697—2002 进行[6]。 试验采集以20 km/h、30 km/h、50 km/h匀速工况和急加速工况下行驶时的车内噪声信号,将采集的信号导入测试软件进行回放,筛选无环境噪声干扰的纯电动汽车车内噪声信号26 组。
针对26 组噪声信号,截取53 个时长为5 s、满足实验要求的车内噪声样本,其涵盖了不同时速、不同车况下纯电动汽车车内噪声信号,充分反映纯电动汽车行驶时车内声品质情况。
1.2 主观评价试验
声品质主观评价方法常用的有语义细分法和等级评分法等[7],本文将语义细分法和等级评分法相结合作为主观评价方法。 由于电动汽车存在“噪声低烦躁度高”的现象[8],本文选取愉悦与烦躁两个表达情绪的语义词,以准确表征驾乘人员在车内的真实感受。 评价时,噪声样本音频会播送两遍,播送时长为5 s,播送第一遍时评价者要选择相应语义,间隔5 s 后,进行第二遍播送,此时需对第一次选择语义评价下的等级进行评定。 主观评价试验采用的评分册如图1 所示。
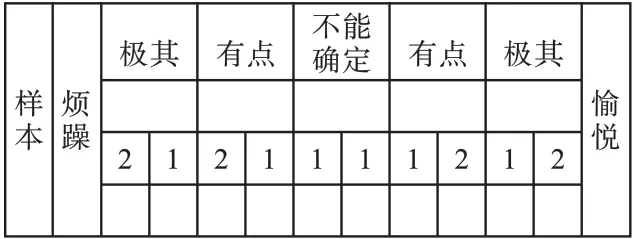
图1 主观评价试验采用评分册
为确保实验数据的科学性以及准确性,本次主观评价试验人员选定为年满18 周岁的12 位汽车相关专业的在读研究生。 采用统计分析软件,对主观评价人员与其对53 个噪声样本的主观评价值进行统计学Spearman 相关系数计算并取绝对值,其绝对值越大,表明两变量的相关性越强。Spearman 相关系数θ计算模型为
式中:B为样本容量;Si为两组样本第i个观察值的秩的差。
一般认为相关系数高于0.7 时表示数据可信度高,满足统计学要求。 计算得到Spearmar 相关系数如表1 所示,由表1 可知第12 位评价者的相关系数为0.654,低于0.7,在进行主观评价计算时予以排除,余下评价者主观评价的平均值作为主观评价结果。
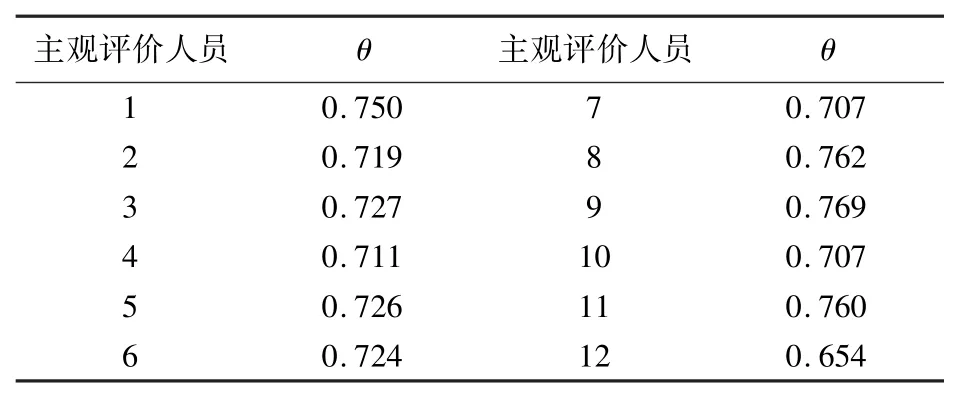
表1 Spearman 相关系数
2 心理声学客观参数及相关分析
选取心理声学客观参数中的语义清晰度AI、粗糙度R、响度N、尖锐度S表征车内声品质情况,表2 为采集的噪声样本k(k=1,2,…,53)中部分样本的心理声学客观参数和满足相关系数要求的主观评价人员对车内声品质进行的主观评价结果Qk。

表2 心理声学客观参数与主观评价结果
3 主客观评价相关分析
选用Pearson 系数表示心理声学客观参数和主观评价结果之间的相关系数P,以明确二者之间是否相关,其计算公式为
表3为根据表2 计算出的P值,从表中可以看到:AI、N、S与主观评价结果均有很强相关性,相关系数均在0.6 以上;R与主观评价结果有较强相关性,相关系数为0.502。

表3 心理客观参数与主观评价结果的相关系数
4 车内声品质预测模型搭建
4.1 确定BP 神经网络结构及训练参数
BP 神经网络是误差反向传播的前向反馈网络,其包括输入层、隐藏层和输出层,可实现给定的输入输出映射关系[9-11],选取语义h1=AI、h2=R、h3=N、h4=S为输入层向量H=(h1,h2,h3,h4)T,车内声品质预测模型拓扑结构如图2所示。
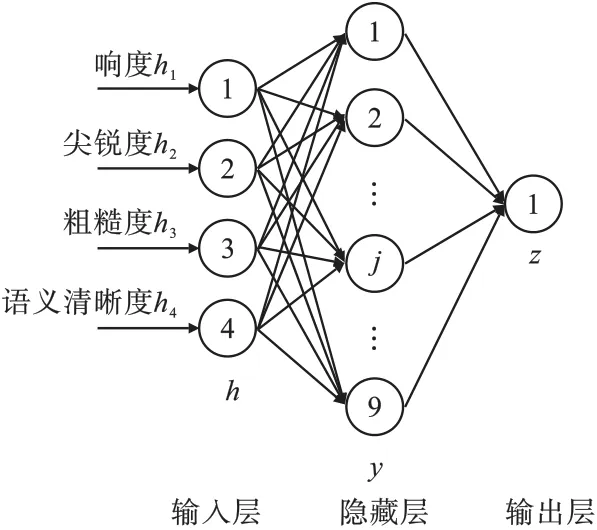
图2 神经网络拓扑图
选取隐含层节点数为m=2l+1 个,其中l为输入层节点数[12],此时l为4 个,则隐藏层节点数为9 个,隐藏层输入向量为
以第j个隐藏层神经元为例(j=1,2,…,9),此时其输出为
式中:hi为输入层第i(i=1,2,3,4)个神经元的输入;w为输入层的权值;θ为输入层阈值。 隐藏层转换函数f1(x)取Tansig 为传递函数,其计算公式为
输入的心理声学客观参数通过隐藏层的数据处理,最终从输出端输出唯一输出层向量,即车内声品质主观评价预测值zj(j=1,2,…,9),其计算公式为
式中:v为隐藏层的权值;q为隐藏层的阈值;输出层转换函数f2(x)取线性函数,令f2(x) =x。
BP 神经网络具有反向传播过程,通过计算输出层与期望值之间的误差调整网络参数,从而使误差变小。 其误差函数E计算公式为
模型训练次数越多,预测模型精度越高,为保证BP 神经网络训练模型精度,模型训练集比例一般不少于样本总数的70%,常见训练集和测试集分配比例为7∶3 与8∶2,为保证本课题预测模型得到充分训练,预测模型训练样本总数A为40,大于样本总数的70%,Qg为样本g期望的车内声品质主观评价值,zg为在样本g作用下的车内声品质主观评价预测值(g=1,2,…,40)。 为解决BP 神经网络初值敏感等缺陷,本文采用灰狼算法对其进行优化,以提高车内声品质预测模型的精度。
4.2 灰狼算法
灰狼算法旨在模仿自然界灰狼的捕猎行为以解决复杂优化问题。 灰狼群有着严格的金字塔式等级制度,其中领导狼被命名为α、β、δ狼,分别代表着最优解、优解和次优解,ω狼为狼群中的底层狼,追随领导狼对猎物进行搜索工作[13-15]。
狩猎行为公式为
式中:C为浮动因子;t为当前迭代次数和Xt分别为经过t次迭代后猎物位置和灰狼的位置;r1为[0,1]内随机向量。
位置更新公式为
式中:M为系数向量;a为从2 到0 线性递减的收敛因子;T为最大迭代次数,本文最大迭代次数取100;r2为[0,1]内随机向量;I为单位矩阵。
寻优具体步骤为
式中:Di为狼群个体的位置到α、β、δ狼所在位置的距离(i=α、β、δ),ω狼在每轮位置更新的最终位置为Xt+1p,取其最优作为BP 神经网络的权值和阈值,优化BP 神经网络,使模型预测的主观评价值精度更高。
4.3 灰狼算法的改进
灰狼算法后期容易陷入局部最优,会影响到模型的预测精度,其收敛因子a对于协调全局搜索和局部搜索性能是重要的因素。 本课题对收敛因子a进行优化,其方案依据曹轲等[16]提出的基于正切函数的非线性控制参数策略,如公式(16)所示。
式中:amax=2;amin=0。 改进后收敛因子a不再按相同速率递减,变为非线性递减,前期下降速率慢,灰狼算法前期增加了全局搜索能力;后期下降速率快,改善了算法局部寻优问题的收敛速率,改进前后收敛因子对比如图3 所示。
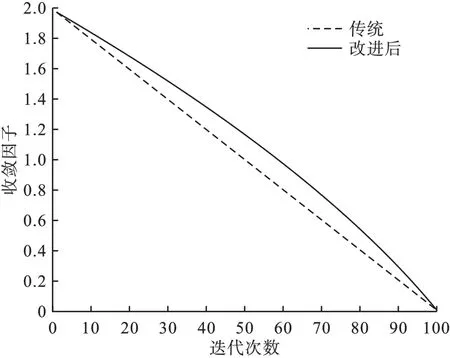
图3 收敛因子对比图
由图3 可知,收敛因子非线性递减提升了寻求最优解的效率和搜索精度,可以较好平衡局部和全局搜索能力。
为了区分α、β、δ狼在狼群中的分工不同,影响力不一,选用适应度值和基于步长欧氏距离的动态权重位置更新策略,计算公式为
式中:fi为适应度值(i=α、β、δ);Wi分别为灰狼种群对α、β、δ的学习率。ω狼在每轮位置更新的最终值为Xt+1p,取其最优作为BP 神经网络的权值和阈值,优化BP 神经网络,使得模型预测的主观评价值精度更高。
4.4 IGWO-BP 神经网络车内声品质预测模型
建立IGWO-BP 神经网络车内声品质预测模型,其流程如图4 所示。
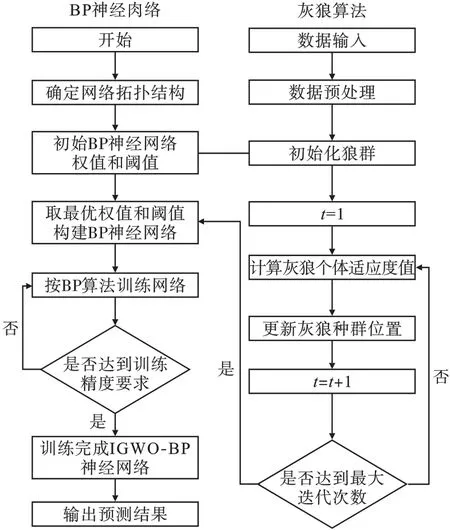
图4 IGWO-BP 流程图
具体流程如下。
1)对噪声样本数据进行处理。
2)定义BP 神经网络拓扑结构。 依据经验,定义灰狼种群大小为30,将BP 神经网络的各层权值、阈值设定为改进灰狼算法的求解对象,并进行全局寻优。
3)确立适应度值函数,将灰狼个体中的初始参数作为BP 神经网络的初始值,对神经网络进行训练得到预测输出值Z′g和期望输出Qg,本课题采取平均的均分误差(MSE)作为适应度值函数,其公式为
4)根据公式计算第一代狼适应度值,选取狼群中适应度值最高的3 只作为领导狼α、β、δ。
5)更新灰狼算法中r1、r2、a,根据公式更新每只灰狼位置,作为BP 神经网络初始参数,对网络进行训练,依据公式求得更新后灰狼个体适应度值,重新确定α、β、δ。
6)确定灰狼算法是否达到最大迭代次数100次,若未达到返回5),否则将获得的权值和阈值赋予BP 神经网络最优初始参数。
7)利用最优初始参数构建BP 神经网络,输入样本数据,对BP 神经网络进行训练,直至满足设定要求,输出结果。
5 预测模型比较
5.1 收敛性对比
选取隐含层节点数为9,训练次数设计为1 000次,建立基于BP 神经网络纯电动汽车车内声品质预测模型。 训练目标最小误差设置为0.001,其网络训练误差曲线如图5 所示。
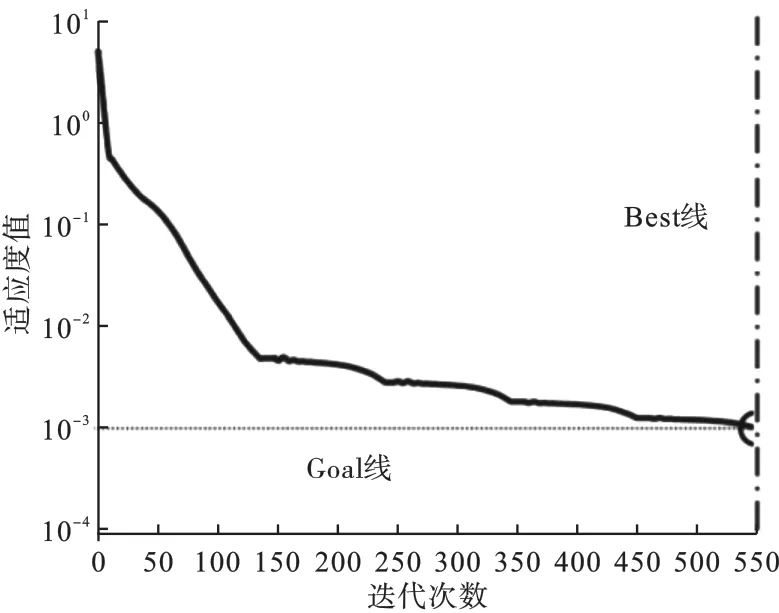
图5 BP 预测模型误差曲线
由图5 可知,该预测模型进行函数拟合时,训练误差缓慢下降,在迭代次数到达550 次时(Best线)实现了预期精度目标(Goal 线),但是在网络训练过程中也出现局部最优的情况,影响了网络向全局最优的趋势发展。 因此,BP 算法的优越性虽然明显,但仍然有进一步提高的空间。
为解决基于BP 神经网络纯电动汽车车内声品质预测模型易陷入局部最优、收敛速度慢等问题,采用改进后的灰狼算法对其进行优化,建立基于IGWO-BP 神经网络的纯电动汽车车内声品质预测模型,对网络模型进行函数拟合,课题设置最大迭代次数为100 次,其网络训练误差曲线如图6 所示。
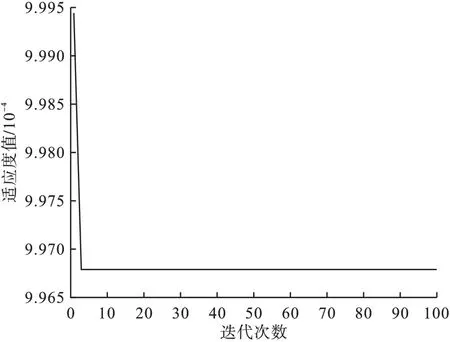
图6 IGWO-BP 预测模型误差曲线
由图6 可知,基于IGWO-BP 神经网络的纯电动汽车车内声品质预测模型进行函数拟合时,在迭代5 次以内实现了预测的预期精度,同时不断收敛至最优适应度值,在迭代10 次以内实现了适应度值最优,表明了IGWO-BP 算法使用自适应调整的控制参数和动态位置权重等可以较好地扩大寻优空间,有效避免局部最优解并提高算法收敛速度。
5.2 预测模型精度对比
利用所建立起来的基于IGWO-BP 和BP 的神经网络纯电动汽车车内声品质预测模型,对测试样本41 至53 进行评价,表4 为两种模型预测结果与相对误差的对比分析。
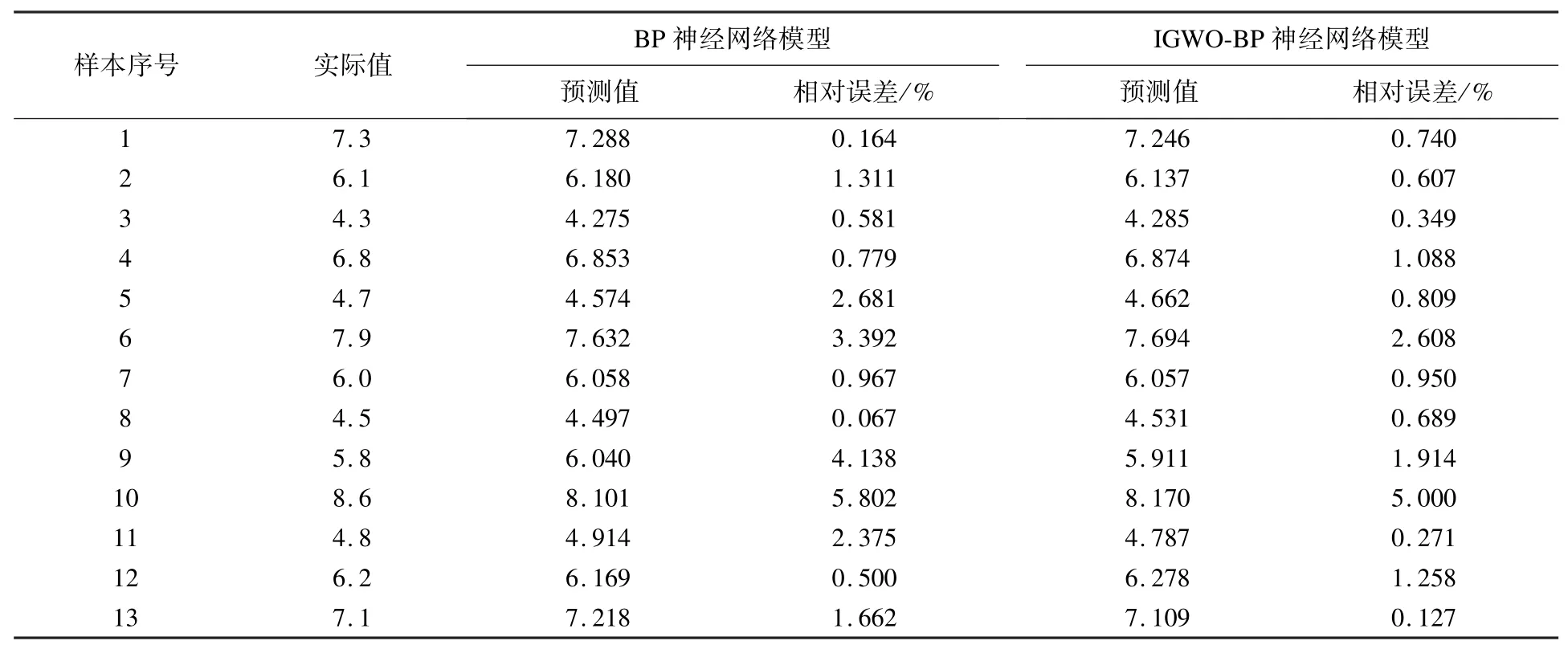
表4 两种模型对比分析
对基于IGWO-BP 和BP 的神经网络纯电动汽车车内声品质预测模型运算10 次,选取MSE、均方根误差(RMSE)、平均绝对误差(MAE)以及平均绝对百分比误差(MAPE)作为模型的评价指标,进行比较分析。 由表5 给出的两种模型精度数据可以看出,IGWO-BP 模型对声品质预测结果MSE 为1. 735%,比传统BP 神经网络模型的MSE 少2.663%,MAE 为8.555%,比传统BP 神经网络模型的 MAE 少4.303%, MAPE 为1.258%,比传统BP 神经网络模型的MAPE 少0.671%,RMSE 为13.137%,比传统BP 神经网络模型的RMSE 少7.570%,说明IGWO-BP 神经网络有效地提高了纯电动汽车车内声品质预测结果的精确度。
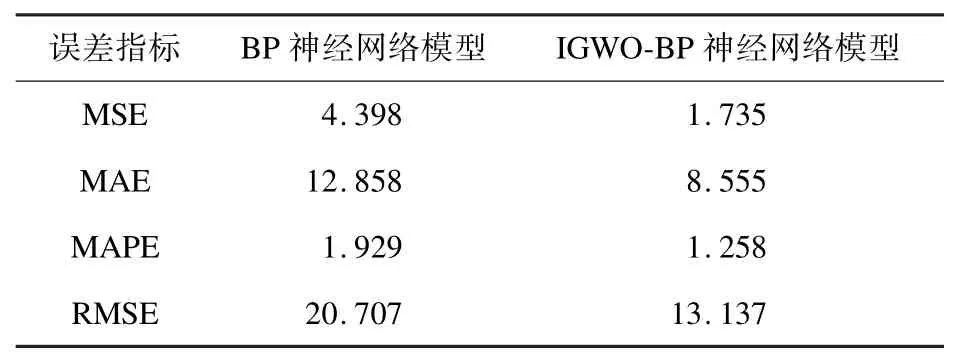
表5 两种模型精度分析%
6 结论
本文针对纯电动汽车车内声品质预测模型精度不高问题,提出了基于IGWO-BP 神经网络纯电动汽车车内声品质预测模型。 模型选取非线性减少的收敛因子和基于适应度值以及基于步长欧氏距离的动态权重位置更新策略,对传统的BP 神经网络模型进行优化,有效避免了预测模型易陷入局部最优解和收敛速度慢等问题,大幅提升了预测模型精度,MSE 提升2. 663%、RMSE 提升7.570%、MAE 提升4. 303%,以及MAPE 提升0.671%,说明该模型较适用于纯电动汽车车内声品质预测。
猜你喜欢
中共云南省委党校学报(2022年1期)2022-04-26 13:55:44
汽车维修与保养(2021年8期)2021-02-16 00:28:32
小学生优秀作文(低年级)(2020年4期)2020-07-24 08:31:16
小太阳画报(2019年1期)2019-06-11 10:29:48
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
数学大王·低年级(2018年5期)2018-11-01 10:34:06
法律方法(2018年2期)2018-07-13 03:22:06
海外星云(2016年17期)2016-12-01 04:18:42
快乐语文(2016年15期)2016-11-07 09:46:31
读写算(中)(2015年6期)2015-02-27 08:47:14