基于角域重采样与VMD的电梯曳引轮轴承故障诊断方法*
2023-08-31 02:48:16魏义敏杨乐红
机电工程 2023年8期
魏义敏,刘 辉,杨乐红
(浙江理工大学 浙江省机电产品可靠性技术研究重点实验室,浙江 杭州 310018)
0 引 言
随着社会的快速发展,高层建筑的增加带动了电梯使用数量的不断增长[1]。目前,我国进入老化期的电梯数量不断增多,电梯故障率也随之攀升[2]。
曳引轮轴承在重载、准交变载荷的作用下将会出现裂纹、点蚀、胶合等故障,从而导致轿厢异常抖动等事故发生,严重威胁人们出行安全[3]。因此,对曳引轮轴承进行故障诊断与识别具有重大意义。
对曳引轮轴承开展故障诊断主要存在2个难点:1)曳引轮轴承振动信号包含环境噪声,使其故障特征不明显;2)曳引轮轴承运行时处于变转速工况,难以准确地提取故障特征,最终导致曳引轮轴承故障识别率不高[4]。
目前常用的特征提取方法主要有经验模态分解[5]、固有时间尺度分解[6]、经验小波变换[7]和变分模态分解[8]等。与小波变换(wavelet transform,WT)相比,VMD不用选取基函数;与经验模态分解(empirical mode decomposition,EMD)相比,VMD的理论基础更为坚实,且有更强的鲁棒性[9]。因此,进行多变量非平稳信号分析时,VMD相较于其他方法有着更好的特征提取效果[10]。
LI Ji-meng等人[11]提出了一种基于频谱分割的能量约束方法,确定了VMD参数取值,抑制了VMD模态混叠效应;但该方法未考虑不同参数之间的相互影响,还存在自适应不足的问题。FU Wen-long等人[12]采用中心频率观测法和最小二乘误差指数方法确定了VMD参数,将其用于水轮发电机振动趋势预测;但该方法存在噪声鲁棒性较差的问题。
近年来,在VMD参数选取方面,采用寻优算法取得了不错的效果[13]。韩朋朋等人[14]采用遗传算法优化VMD参数的方法,对滚动轴承的早期故障进行了诊断;但该方法存在迭代次数多、收敛速度慢的缺陷。司呈鑫等人[15]采用粒子群算法对VMD参数进行了寻优,并结合快速谱峭度法识别出了转轴裂纹故障;但参数寻优过程容易陷入局部最优值。
针对轴承变转速工况问题,角域重采样是可用于降低变转速工况影响的行之有效的方法[16]。王博等人[17]在齿轮箱输出端加装了转速传感器,将时域非平稳信号转化成了角域平稳信号,对行星齿轮箱在变转速工况下的故障进行了诊断;但该方法需要加装额外的转速装置,不仅增加了故障诊断的成本,还存在适用范围较为局限的缺点。韩佳霖等人[18]提出了一种广义解调的无转速阶次跟踪算法,降低了检测信号频谱模糊的影响;但该方法在强背景噪声、复杂工况下,估计转速与实际转速存在一定的误差,影响故障诊断精度。
通过上述研究发现,VMD分解能够有效分离故障信号与干扰信号,但需提前设置合适的分解参数。角域重采样能够解决曳引轮轴承变转速工况问题,但受限于转速信号的提取方式。
基于以上问题,笔者首先根据轿厢运行特性进行曳引轮轴承振动信号的角域重采样;然后,利用SSA自适应方法选取VMD参数,并提取故障特征指标构建特征集;最后,通过训练得到多种故障分类模型,并开展故障注入试验,对相关方法进行验证。
1 曳引轮轴承振动信号角域重采样
1.1 轿厢运行速度曲线
曳引电梯运行过程中,轿厢将会经历启动、加速、匀速、减速、制动5个阶段,电梯曳引系统运行速度示意图如图1所示[19]。

图1 电梯曳引系统运行示意图
由图1可知:轿厢运动过程大致可分为匀速和变速两种状态。电梯从静止加速至轿厢设定速度并保持匀速运动;当电梯到达减速点时,曳引机输出力矩减小,轿厢开始减速运行;到达停机点时制动器发生抱闸动作,实现轿厢的精准平层。
曳引轮转速公式如下:
(1)
式中:ωd为曳引轮转速;vc为轿厢运行速度;rd为曳引轮半径;λ为电梯曳引比。
由式(1)可知,曳引轮转速可由轿厢运行速度获得。通过对轿厢加速度曲线积分计算,可以获得轿厢运行速度曲线,轿厢运行速度公式如下:
(2)
式中:vt为t时刻轿厢运行速度;vt-1为t-1时刻轿厢运行速度;fs为传感器采样频率;at为t时刻轿厢加速度。
1.2 基于轿厢运行速度的曳引轮振动信号角域重采样
角域重采样的关键在于获得准确的转速信号。目前获取转速信号的途径主要有硬件采集转速信号和基于瞬时相位估计转速信号两种方法。两者都存在其局限性,前者需要加装转速采集装置,后者需要在复杂工况下准确提取瞬时相位。
因此,笔者提出一种基于轿厢运行速度估计曳引轮转速的角域重采样方法。具体步骤如下:
步骤一:传感器安装。分别在曳引机基座和轿厢底板上安装振动传感器和加速度传感器,采集相应信号;
步骤二:计算曳引轮转速信号。根据轿厢加速度信号,按照式(1)、式(2)计算得到曳引轮转速信号;
步骤三:曳引轮振动信号角域重采样。根据转速信号并利用插值法获得曳引轮角域振动信号。
采用上述方法对曳引轮轴承振动信号进行角域重采样时,既避免了在曳引轮狭窄的空间加装转速计,又解决了提取瞬时频率方法在复杂工况下转速估计偏差较大的问题。
2 基于角域重采样与VMD的曳引轮轴承故障诊断方法
2.1 基于麻雀搜索算法的变分模态分解
麻雀搜索算法是根据麻雀觅食和反哺行为而提出来的群智能优化算法[20],其通过不断更新个体位置,并计算当前位置适应度函数,使得种群不断逼近最优值。作为一种群智能优化算法,麻雀搜索算法具有稳定性好、寻优精度高和收敛速度快的优点,相较于其他群智能算法有明显的优势[21,22]。
笔者提出一种基于SSA算法优化VMD参数的方法,该方法以平均排列熵为适应度函数对参数K和α进行全局寻优。具体步骤如下:
步骤一:初始化SSA参数。设定种群大小、迭代次数以及发现者、跟随者和警戒者比例;
步骤二:初始化VMD参数。设置VMD参数K和α的寻优范围;
(3)
式中:Pj为序列排序的概率分布;N为子序列数;K为VMD分量个数;
步骤四:构建各种群的位置,更新公式并进行迭代计算。
发现者位置更新公式如下:
(4)

跟随者位置更新公式如下:
(5)

警戒者位置更新公式如下:
(6)

通过式(4)~式(6)更新发现者、跟随者和警戒者的位置,使得种群不断逼近最优参数;
步骤五:结束迭代寻优,计算到最大迭代次数时停止迭代,并得到最优分解参数K和α;
步骤六:振动信号分解,以最优参数K和α对振动信号进行分解,最终得到K个模态分量。
2.2 曳引轮轴承故障诊断方法
针对曳引轮轴承故障诊断效果受电梯变转速工况和环境噪声影响的问题,笔者提出一种基于角域重采样和SSA-VMD相结合的故障诊断方法,具体步骤如下:
步骤一:信号采集。采集轿厢运行加速度和曳引轮轴承振动信号;
步骤二:振动信号角域重采样。根据轿厢运行速度估计曳引轮转速信号,并采用插值法对振动信号进行角域重采样;
步骤三:基于SSA算法的VMD参数寻优。以平均排列熵作为适应度函数,采用SSA算法对VMD参数进行自适应选取;
步骤四:构建故障特征集。通过SSA-VMD对角域信号进行分解,根据最大峭度准则选取分量,并构建故障特征集;
步骤五:构建故障分类模型。通过构建故障分类模型对曳引轮轴承故障进行诊断与识别。
曳引轮轴承故障诊断流程图如图2所示。
3 试验验证
3.1 试验装置
为了验证所提方法对曳引轮轴承故障诊断的有效性,笔者在电梯上开展了曳引轮轴承故障注入试验。
试验及采集装置如图3所示。

图3 试验及采集装置
3.2 曳引轮轴承故障注入
曳引轮轴承主要故障模式有裂纹、点蚀、胶合等;根据故障发生的部位,故障模式又可以分为外圈故障、内圈故障和滚动体故障[23-25]。
笔者在曳引轮轴承不同部位注入故障,以模拟实际工况下的轴承故障。
滚动轴承故障类型如图4所示。
图4(a)为通过电火花加工的滚动体故障轴承;图4(b)为内圈裂纹宽度1 mm的内圈故障轴承;图4(c)为外圈裂纹宽度1 mm的外圈故障轴承;图4(d)为正常曳引轮轴承。
3.3 故障特征提取与诊断
笔者通过更换曳引轮不同故障轴承,采集到相应曳引轮轴承的振动信号和轿厢加速度信号。
以外圈裂纹故障为例,曳引轮轴承外圈裂纹故障时域信号如图5所示。
由图5可知:曳引轮轴承外圈裂纹故障时域信号主要包含制动器动作时产生的固有振动信号和轴承故障产生的异常振动信号。
电梯上行过程中,通过轿厢底板的加速度传感器采集到轿厢运行加速度信号,轿厢运行加速度信号如图6所示。
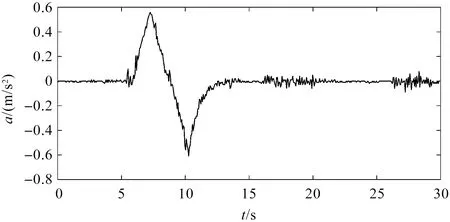
图6 轿厢运行加速度信号
由于试验电梯行程较短,当轿厢加速到预设速度时,控制柜便发出减速的指令,图6中轿厢匀速阶段并未完全体现。
笔者根据轿厢运行加速度估计得到轿厢运行速度曲线,并通过式(1)计算得到曳引轮转速信号,曳引轮转速示意图如图7所示。
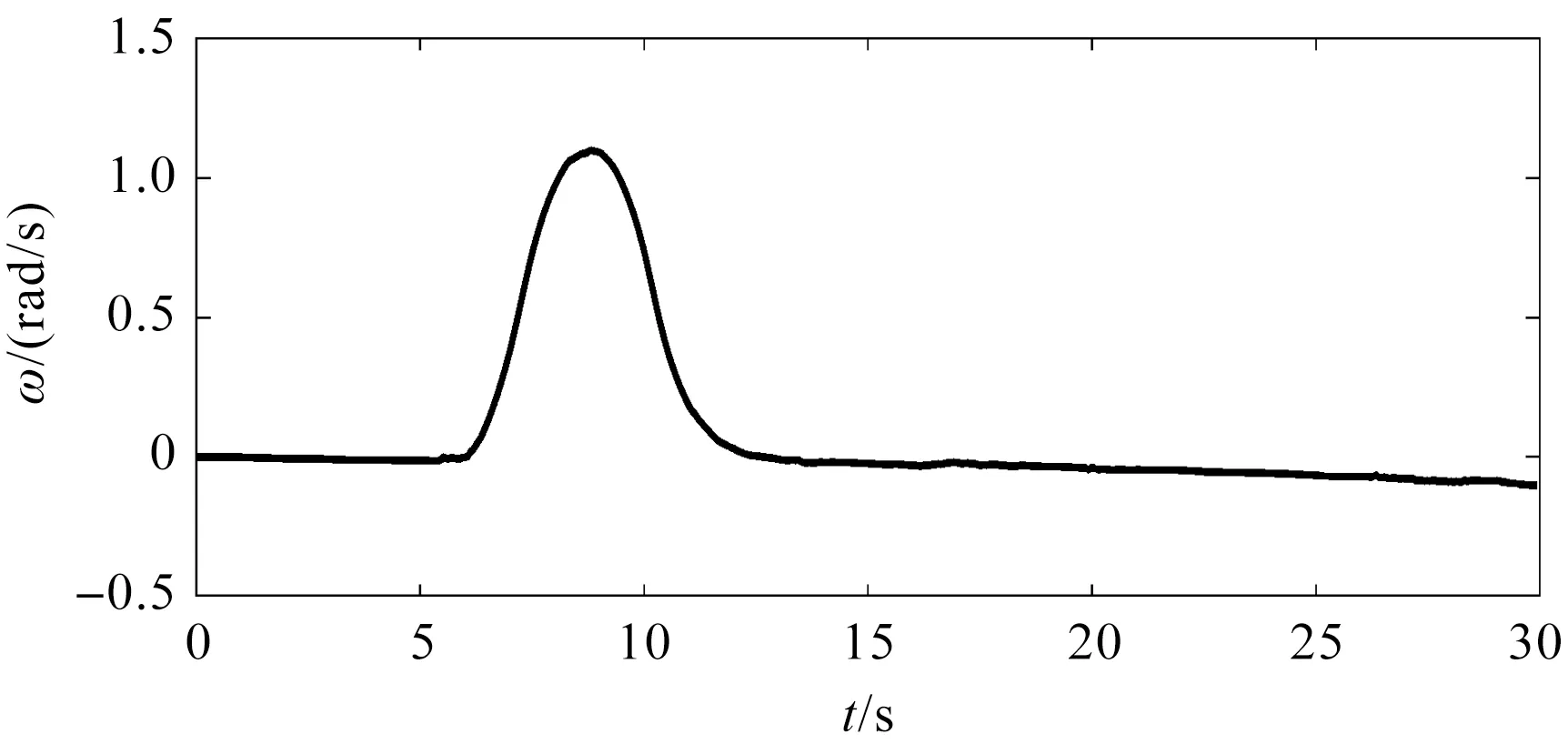
图7 曳引轮转速示意图
由图7可知:曳引轮转速曲线与轿厢运行速度曲线趋势一致,虽然曳引轮处于匀速阶段的时间较短,但并不影响振动信号的角域重采样。
笔者选取时间跨度为0.5 s的曳引轮轴承故障信号,曳引轮轴承故障时域信号如图8所示。
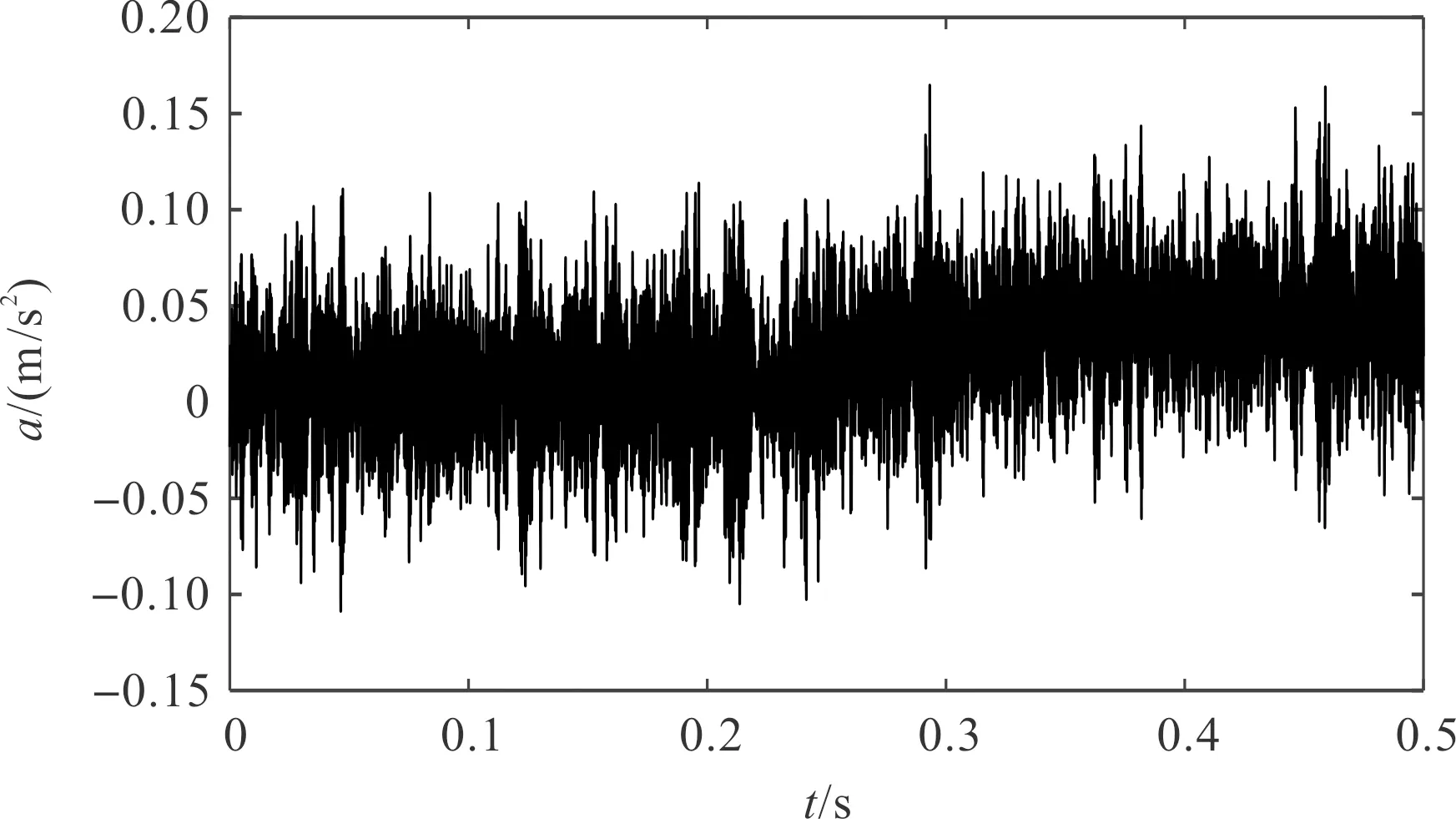
图8 曳引轮轴承故障时域信号
由图8可知:曳引轮轴承故障信号受变转速工况影响,在时域上表现为非平稳性信号,其振动幅值随转速波动而变化。
笔者根据曳引轮转速信号对故障时域信号进行角域重采样,得到曳引轮轴承故障角域信号。曳引轮轴承故障角域信号如图9所示。
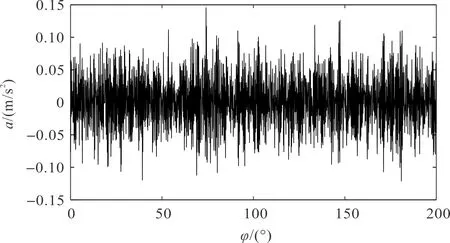
图9 曳引轮轴承故障角域信号
角域重采样将非平稳时域信号转换为平稳角域信号,从而消除了转速波动对曳引轮轴承特征提取的影响。
为了验证角域振动信号不受转速波动影响,笔者统计了角域重采样前后多种故障指标的变化情况,并绘制故障指标变化的箱型图。
故障指标变化箱型图如图10所示。
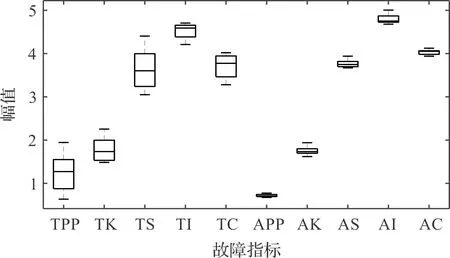
图10 故障指标变化箱型图
由图10可知:时域故障指标的箱体较长,数据分布较为散乱,角域故障指标箱体较短,数据分布较为集中。从而可以说明,角域重采样能够消除故障指标随转速变化的影响。
笔者分别采用粒子群算法(particle swarm optimization,PSO)、遗传算法(genetic algorithm,GA)和麻雀搜索算法对VMD参数进行寻优,并设置上述算法的参数以及VMD参数寻优范围。其中,迭代次数设置为30次,种群规模设置为50,参数K的寻优范围为[2,10],α参数的寻优范围为[620,7 800]。
优化算法适应度曲线如图11所示。
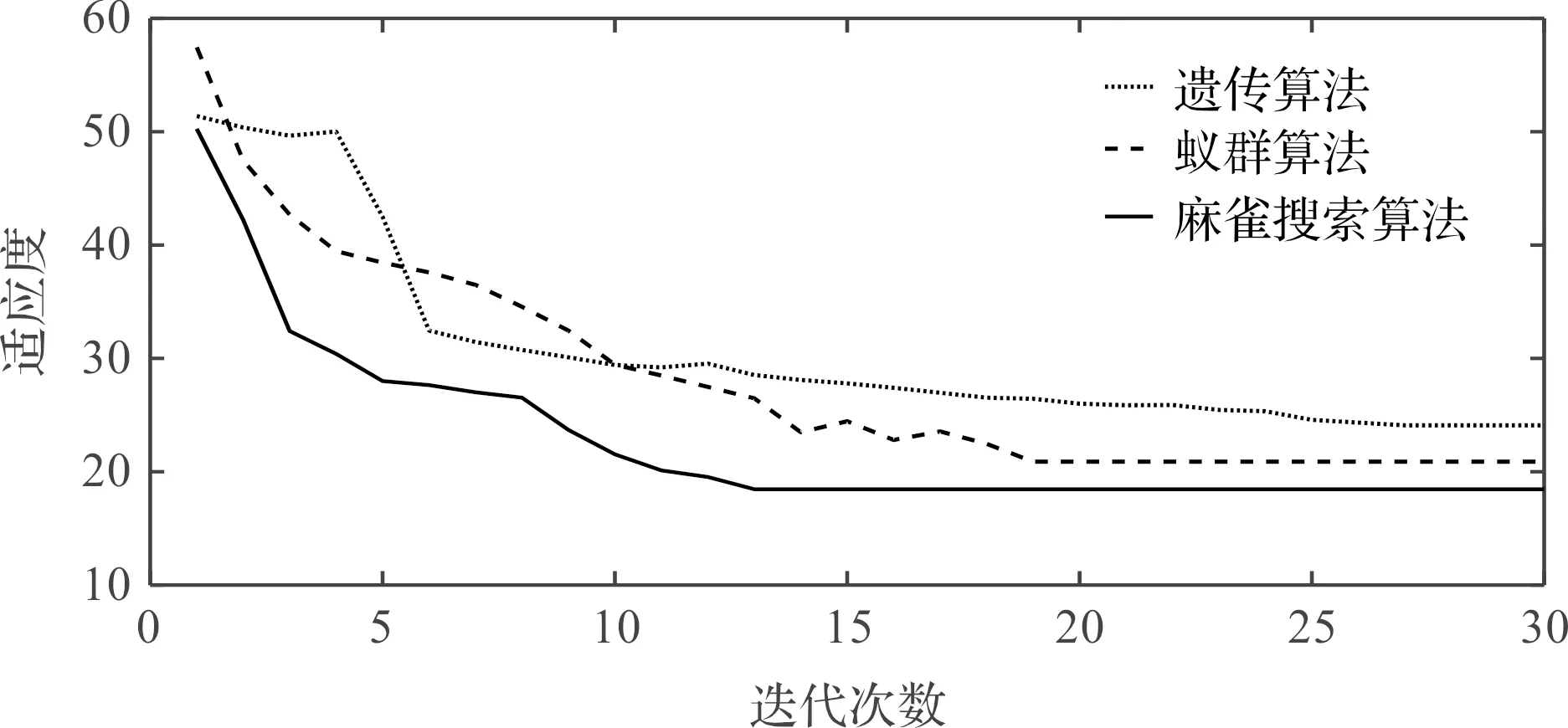
图11 优化算法适应度曲线
根据优化算法适应度曲线可知:遗传算法在经过26次迭代后得到VMD最优参数组合K=4,α=4 510;粒子群算法经过18次迭代后得到VMD最优参数组合,K=4,α=3 245;麻雀搜索算法经过12次迭代后得到VMD最优参数组合,K=4,α=2 468。
上述结果显示:麻雀搜索算法收敛速度最快,而且收敛的适应度值最小,分解后分量信号分布最为规律。
笔者通过轿厢运行速度估计曳引轮转速,进行角域重采样后,利用SSA算法对VMD参数寻优,得到最佳分解参数,K=4,α=2 468,并将角域振动信号分解得到相应分量。
SSA-VMD分解图如图12所示。
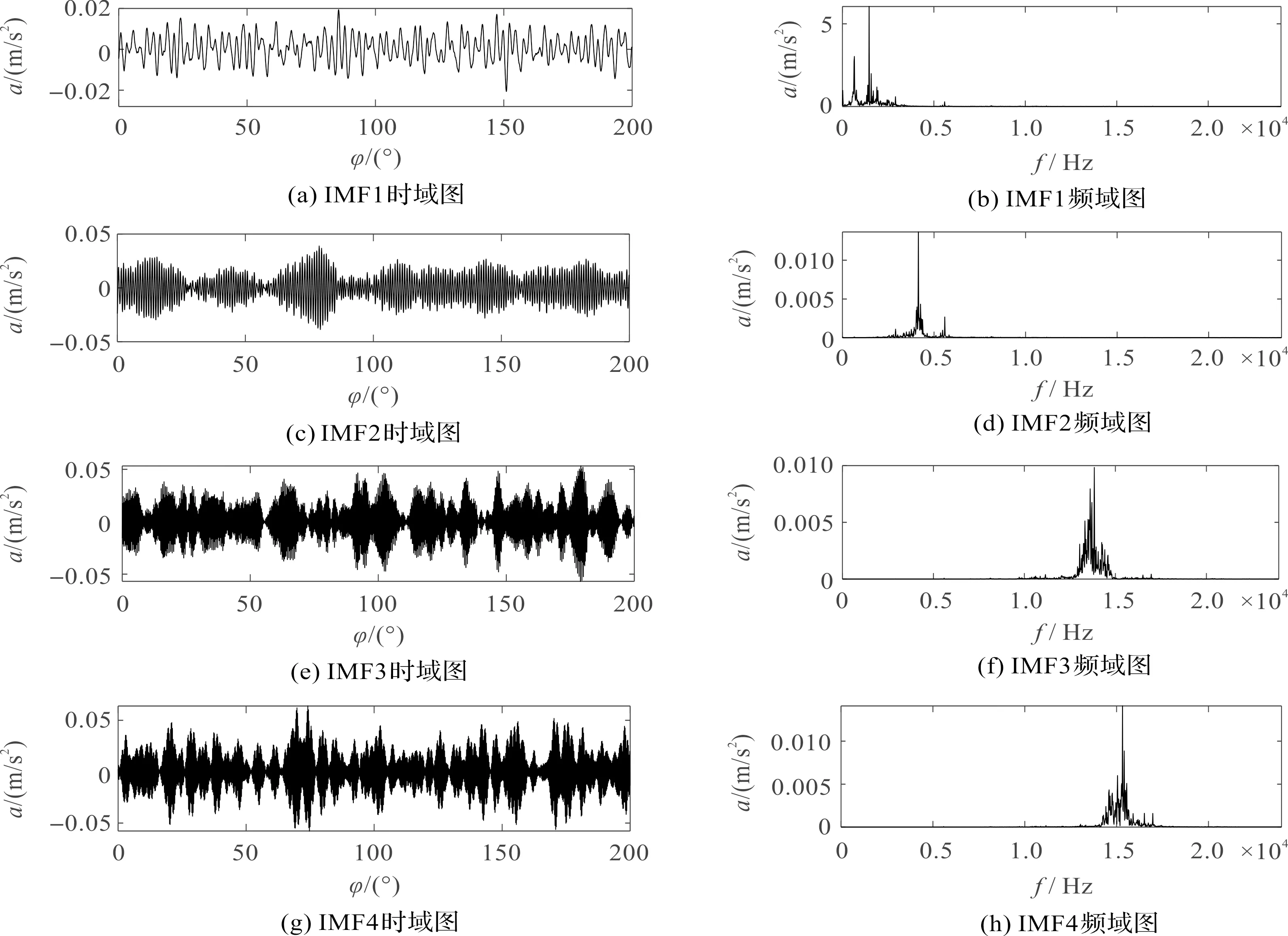
图12 SSA-VMD分解图
笔者分别采集曳引轮轴承3种故障信号和正常信号各50组,共200组。按照诊断流程,提取16类时频特征指标,最后将特征集的50%划分为训练集,剩余50%作为测试集输入分类模型,进行识别分类。
笔者选取支持向量机(support vector machines,SVM)、核极限学习机(kernel based extreme learning machine,KELM)和一维卷积神经网络(1D convolutional neural network,1D-CNN)这3种分类模型对曳引轮轴承开展故障识别与分类。
KELM分类模型中,核函数为高斯径向基核函数(radial basic function,RBF),当正则化系数c=45.6、核函数参数σ=8时,故障识别效果最佳。
KELM模型故障识别结果如表1所示。

表1 KELM模型故障识别结果
SVM分类模型中,惩罚因子c和核函数参数g分别取[15.4,0.54]时,故障分类效果最佳。
SVM模型故障识别结果如表2所示。
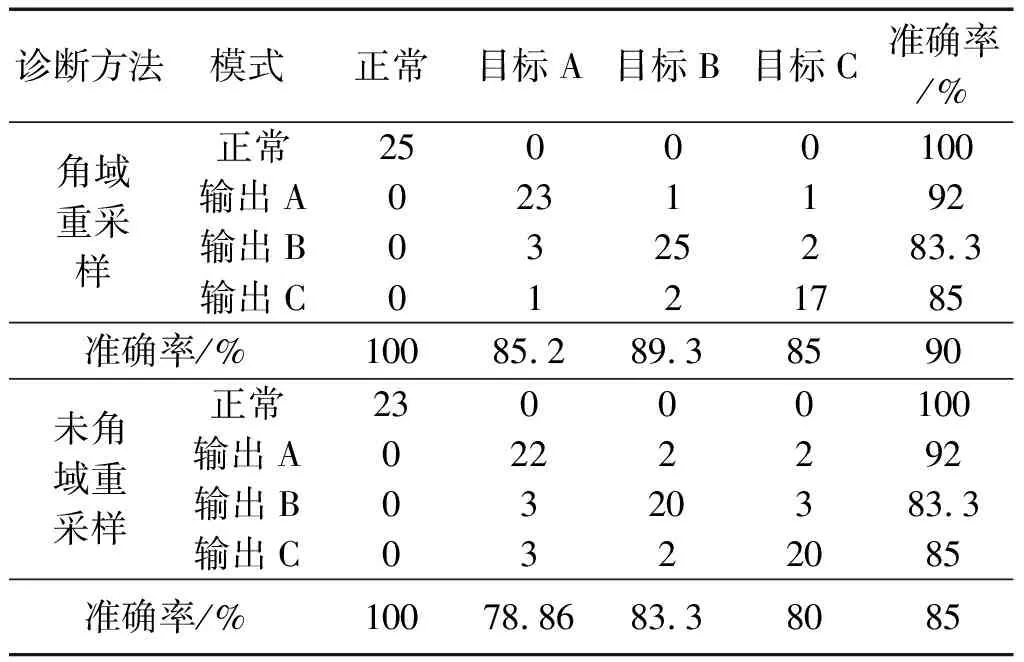
表2 SVM模型故障识别结果
1D-CNN模型的学习率设置为0.001,迭代次数设置为100次,1D-CNN网络模型结构如表3所示。
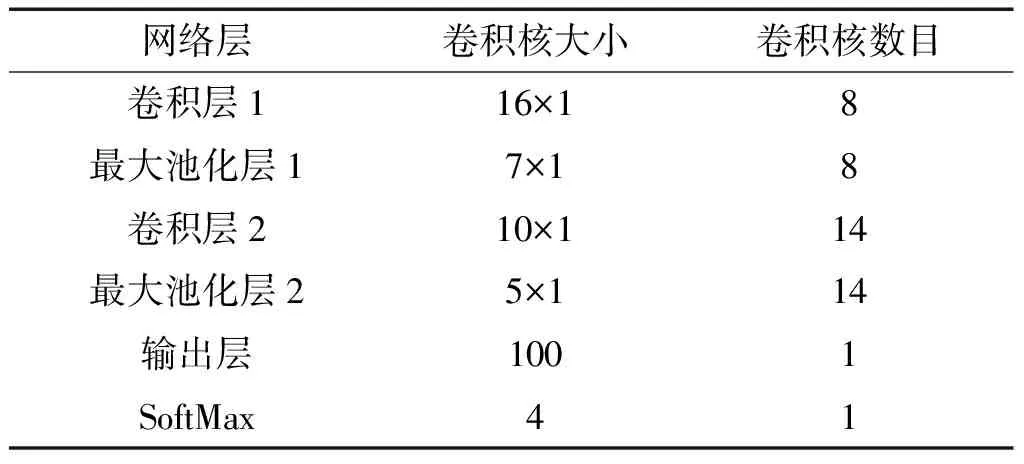
表3 1D-CNN网络模型结构
1D-CNN模型故障识别结果如表4所示。
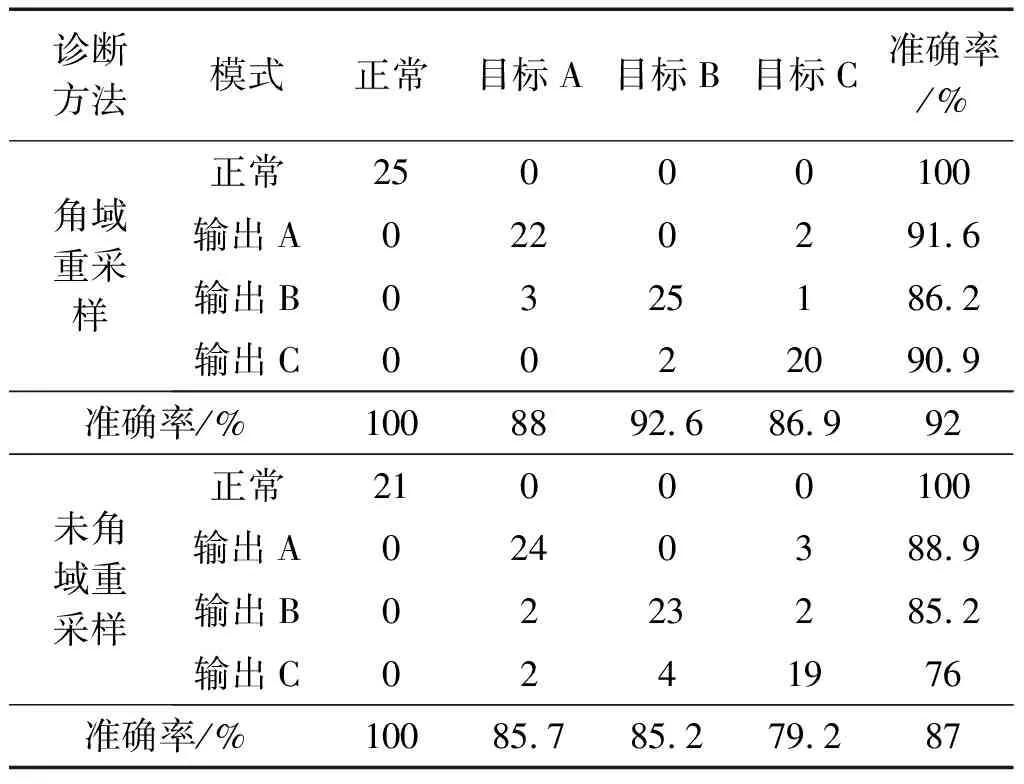
表4 1D-CNN模型故障识别结果
对比分析表1~表4可知:3种分类模型都能准确识别曳引轮轴承是否发生故障。其中,角域重采样后的KELM分类模型故障识别率最高,达到95%的准确率;KELM分类模型由于引入核函数来映射特征之间的关系,整体故障识别率优于SVM模型和1D-CNN模型;1D-CNN模型受限于样本数据量,识别效果表现一般。
振动信号经过角域重采样后,提高了故障特征提取的准确性,故障分类准确率提升至少5%以上。
4 结束语
针对曳引轮轴承故障诊断易受环境噪声和变转速工况影响导致诊断效果欠佳的问题,笔者提出了一种基于轿厢运行速度的角域重采样方法,及一种基于SSA-VMD的故障诊断方法,并通过故障注入试验,验证了方法的有效性,并得到以下结论:
1)对曳引轮变转速振动信号进行角域重采样时,通过轿厢运行速度估计曳引轮转速的方法准确地获取了曳引轮转速信息,避免加装转速计的局限性;相较于无转速计方法,角域重采样效果不受环境噪声影响;
2)基于SSA算法和平均排列熵适应度函数能够自适应获得VMD最优分解参数,VMD分解能有效分离环境噪声与故障特征,准确提取曳引轮轴承的故障特征;
3)通过对比试验结果可知,角域重采样消除了变转速对曳引轮轴承故障诊断的影响;相较于未角域重采样的故障识别模型,角域重采样后的故障识别模型诊断率至少提高了5%。
因为当前的研究仅考虑单一的故障情况,所以在今后的工作中,笔者将进一步研究电梯曳引系统多部件故障耦合时的诊断方法。
猜你喜欢
机电工程技术(2022年10期)2022-11-27 10:37:38
设备管理与维修(2020年9期)2020-06-01 10:25:56
航空工程进展(2019年6期)2019-12-31 10:49:40
中国特种设备安全(2019年7期)2019-09-10 07:30:56
中国特种设备安全(2019年4期)2019-05-20 09:55:44
长沙航空职业技术学院学报(2019年3期)2019-04-24 11:09:18
中国特种设备安全(2019年2期)2019-04-22 03:14:10
苏州科技大学学报(自然科学版)(2018年4期)2018-11-21 03:32:34
中国特种设备安全(2018年4期)2018-05-15 11:32:21
中国质量监管(2016年10期)2016-07-10 10:24:23