运输顺槽无轨自移列车系统研发及应用
2023-08-31 09:34王东
机械管理开发 2023年7期
王 东
(山西乡宁焦煤集团燕家河煤业有限公司, 山西 临汾 042100)
0 引言
近几年,随着综采工作面煤炭产量的提升,采煤设备也不断向大型化方向发展,同时配套设备也随之增加,例如一些供电供液配套设备的增多,使得综采面采掘设备的总质量不断变大。因此,随着采掘设备输送过程中列车的承载力持续变大,这些综采设备的输送过程中的安全性就很难得到保障,传统绞车牵引输送的方式也就越发不安全,不仅容易损坏采掘设备,而且严重威胁到了井下工作人员的生命安全。滑靴式无轨自移列车系统的应用,通过研究液压支架的推移过程,使得原有有轨绞车牵引方面的弊端得到有效解决,承载能力更大,安全性得到了明显提升。
1 3202 工作面概况
无轨自移列车系统主要应用于某矿3202 综采工作面运输顺槽,该综采面开采4 号煤层,运输顺槽长度780 m,宽×高=2.8 m×4.0 m。该综采面配置有无轨自移列车16 辆,电缆车3 辆,阻化泵、注水泵各1台,乳化泵2 台以及各类组合开关、油脂库、操作台等辅助设备。设计总长约70 m,综采面向前推进过程中,无轨自移列车系统向前同步跟进0.8 m,无轨自移列车具体配置参数如表1 所示。
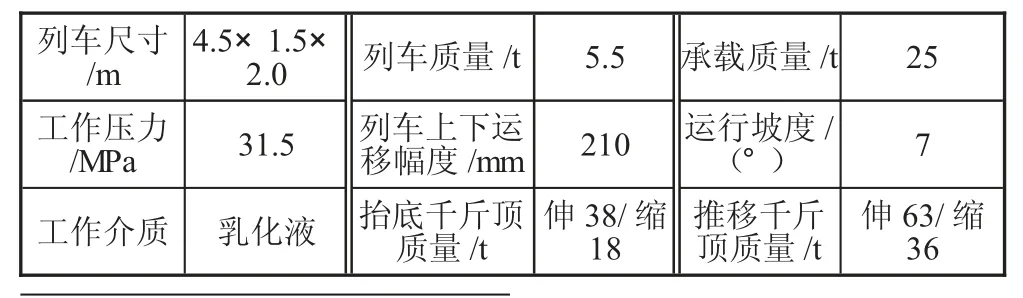
表1 无轨自移列车主要技术参数
2 系统研发设计
2.1 无轨自移列车设计
无轨自移列车运行过程是参考液压支架推架过程进行设计的,自移列车的机械结构主要包括列车车体、推移抬底千斤顶、前后拉杆以及电缆槽操作阀组等,具体无轨自移列车构造如图1 所示。其中推移抬底千斤顶是无轨自移列车主要的运行结构,通过配合车体以及两拉杆作为支撑点实现无轨列车向前推移过程。
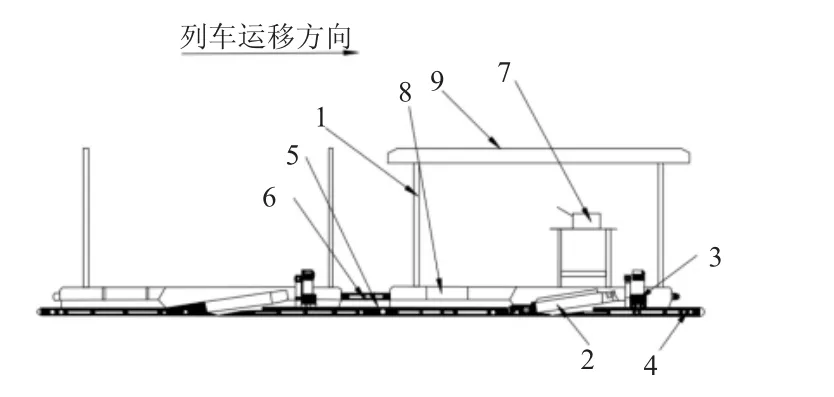
图1 无轨自移列车结构示意图
由图1 无轨自移列车的结构组成可以看出,列车在运移过程中主要分以下几步:
1)控制抬底千斤顶供液伸出,伸出位置可使得无轨自移列车的车头部位抬升210 mm 左右,确保无轨自移列车车底与运输顺槽底板成一定夹角[1-2]。
2)控制推移千斤顶供液伸出,将无轨自移列车车体向前推移一个步距,距离在780 mm 以内,同时无轨自移列车车体在前推杆上也向前推移出相同的距离。
3)操控操作阀,将抬底千斤顶缩回,并将无轨自移列车车体缓慢回落至接触地面。
4)操控操作阀,缩回推移千斤顶,同时使得前推杆及后推杆向前推移一个步距,完成无轨自移列车的一个步距推移过程。在后续综采面推进过程中,按之前顺序重复运行,则可完成无轨自移列车的同步推进。
2.2 液压系统研发设计
无轨自移列车的液压动力来源与综采工作面液压支架相同,由液压泵站供液来为各千斤顶提供运行动力。为确保运输顺槽无轨自移列车系统能够在井下复杂工作环境中保持稳定运行状态,适应各种条件下的平稳运行效果,该液压系统在供液管路上附带有截止阀、调速阀以及电液控制阀等多种液压调节装置。同时附带有智能反冲洗过滤器来对整体供液系统进行清洁,调速阀对供液量来进行精确调控,回路阀、安全阀等确保液压系统的安全运行等,具体液压控制结构原理如图2 所示。
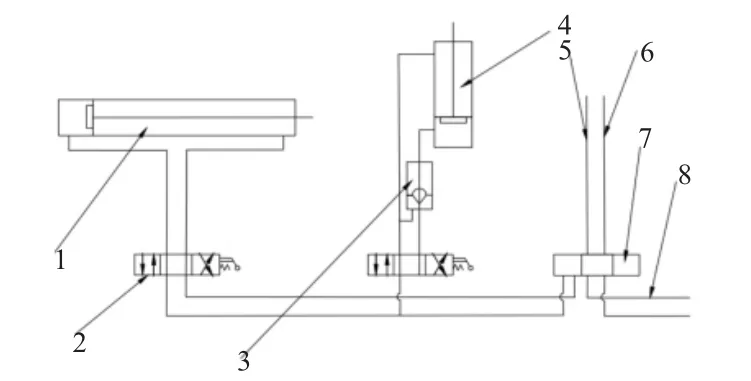
图2 无轨自移列车供液系统结构
2.3 智能化控制系统研发
无轨自移列车智能化控制系统主要包括智能巡检、电液控制、运行环境检测以及各类辅助系统,各系统协调运行实现无轨自移列车随综采工作面同步推进运行。
1)智能巡检检测。通过在运输顺槽布设云台摄像仪并通过视频交换机以及地面控制室显示等来对无轨自移列车的运行状态进行远程监控,在无轨自移列车终端还布设照明系统来增强视频监控的清晰度,摄像头安装于无轨自移列车车体上,并可进行全方位旋转来增强对无轨自移列车的监控效果。智能巡检装置与云台摄像仪类似,通过布设在无轨自移列车车顶的巡检机器人来对无轨自移列车在运输顺槽中运行时的风速、瓦斯以及温度等参数进行数据采集,巡检机器人可在无轨自移列车上沿轨道运行,增大巡检监测范围[3]。
2)电液控制。电液控制系统的组成主要包括换向阀、测距仪、控制器、各类传感器装置、显示灯、运输顺槽主机以及连接线路等,可以实现对运行工况的实时监测精确控制,还可以对无轨自移列车的运行轨迹进行纠偏紧急闭锁等控制。电液控制系统的各类传感器装置中倾角传感器布设于无轨自移列车车体上用于对车辆的运行状态进行实时监测;位移传感器以及压力传感器分别布设于千斤顶以及支撑拉杆上,用于对千斤顶的行程以及支撑拉杆的压力进行监测,确保无轨自移列车的安全运行。各监测数据可及时传输至控制器,并由控制器上传至运输顺槽控制室来对无轨自移列车进行远程控制。
3)运输环境监测系统主要包括各类传感器装置,通过在无轨自移列车车体布设瓦斯浓度传感器、温度传感器以及粉尘浓度传感器等装置来对运输顺槽无轨自移列车的运行环境进行实时监测,当监测到运行过程中出现瓦斯浓度超限或其他参数超标情况时,可及时利用控制器来对无轨自移列车进行紧急制动或断电报警等操作,告之工作人员启动预警方案进行故障排除。
4)辅助系统指位于无轨自移列车尾部车体上的一些物料输送存储系统、避灾避险系统以及服务器线路集控中心等。物料系统主要是用于综采工作面存储的一些应急储备工具物料等,通过对这些物料进行信息登记来对物料的数量及分发情况进行记录,并及时补充;避灾避险系统与物料系统类似,布设于无轨自移列车尾部来对运输顺槽或综采工作面的一些突发事故进行处理,在车体内有救生舱以及各种紧急物资可在综采工作面或运输顺槽出现紧急事故时,工作人员无法及时撤离情况下进行暂时安置或自救;集控中心指无轨自移列车与地面控制中心进行信息交换或远程控制,通过集控中心还可接入综采工作面采煤机等采掘设备将实时数据传输至无轨自移列车控制器,从而实现综采面与无轨自移列车的同步推进效果。
3 系统运行特点以及局限性
无轨自移列车由乳化液泵站提供动力,动力来源与液压支架相同,节省了动力供应难题,同时自移列车运行能力强,推移力大无需额外动力推动,供液系统简单高效;无轨自移列车在一定坡度下不会产生滑移危险,运行过程极为稳定可靠,基本不存在传统绞车牵引过程中的脱钩跑车现象;无轨自移列车运行灵活并可实现自适应控制,在运输顺槽转弯过程中可进行列车的分段移动;无轨自移列车每段都具备独立能源供应,单节无轨列车出现故障并不会影响到整体的运行效果,因此系统运行可靠,故障发生率较低。
在运输顺槽底板浮煤或淤泥较多时,会严重影响到无轨自移列车的运行效果,拉杆的支撑效果会变差从而无法为无轨自移列车提供良好的支撑能力;无轨自移列车对运输顺槽的高度有较高要求,在顶板不平整时会对无轨自移列车顶部电缆安全产生影响;在无轨自移列车运行过程中要尽量保持在顺槽中央,避免向一侧大幅倾斜影响到列车的运行效果。
4 结语
列车作为综采面关键的输送设备,运行过程的好坏关系到综采工作面采掘设备的安全,无轨自移列车系统的应用,实现了列车的无轨自移、远程监控、随工作面协同推进等效果,极大推进了煤矿设备智能化建设进程,具有极大推广应用价值。
猜你喜欢
山西冶金(2021年4期)2021-09-28
重型机械(2020年2期)2020-07-24
石油化工建设(2018年2期)2018-07-11
电力系统及其自动化学报(2016年5期)2016-12-01
凿岩机械气动工具(2016年2期)2016-11-11
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
医疗装备(2014年11期)2014-08-10
机械制造与自动化(2014年1期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01