
机械手的结构设计及PLC 控制
2023-08-31 09:33:10孙晓红
机械管理开发 2023年7期
孙晓红
(尚风科技股份有限公司, 山西 太原 030006)
0 引言
随着工业设备应用越来越广泛,机械手作为现代化生产与科技应用相结合的新型技术,该设备的应用可极大地减轻操作人员的劳动强度,减少作业人员的危险性,提升产品的精度等。根据驱动方式的不同可将机械手分为气压传动、电气传动、液压传动以及机械传动这四种方式。本文以气动传动的机械手为例开展研究,重点对机械手的结构进行设计,并根据机械手的应用需求完成对应的PLC 控制设计,最终实现气动机械手在上下、左右以及伸缩六个方向的高精度、高效率动作[1-3]。
1 机械手概述
根据应用场合的不同可将机械手的控制方式分为手动控制和自动控制两种方式。本文结合实际应用需求设计一款自动控制的机械手,其工作流程一般如图1 所示:
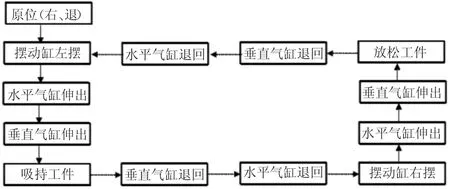
图1 机械手工作流程
如图1 所示,机械手的工作流程一般经历12 个路程,主要控制对象为水平气缸、垂直气缸和摆动气缸,对应的控制动作包括有上下方向的升降、前后方向的伸缩、左右方向的摆动以及夹紧和放松等[4]。
根据结构形式的不同可将机械手分为直角坐标式、圆柱坐标式、球坐标式以及关节式四种。结合本工程机械手的应用需求,选用圆柱坐标式机械手,其结构如图2 所示,圆柱坐标式机械手的主要结构包括有垂直气缸、平移气缸、气爪以及回转缸,通过PLC 控制器根据实际需求对电磁阀的开口方向、大小等进行控制实现对上述气缸及气爪的运动方向、运动速度等参数的控制。其中,垂直气缸对应的在上下方向的工作行程为1 500 mm;回转气缸对应的工作行程角度为180°;气爪的主要作用是对物件的夹持,夹持力通过对调节弹簧的预压压缩量进行调节而实现[5]。
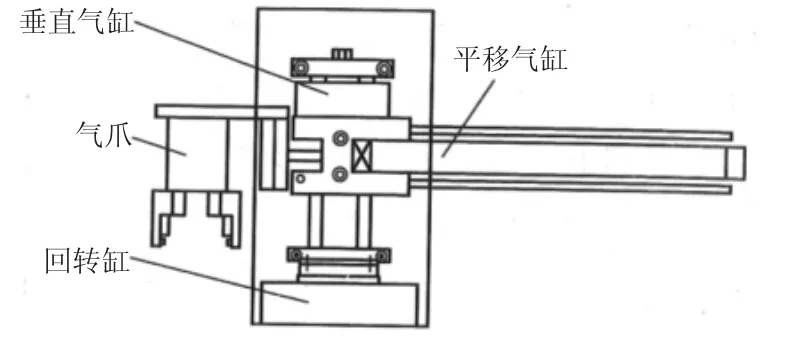
图2 圆柱坐标式机械手结构
2 机械手气动控制系统的设计
2.1 功能模块设计
根据机械手的实际应用需求以及检修排除故障的需求,为其气动控制系统配置手动、半自动以及全自动控制功能模块。其中,手动控制功能模块通过对按钮实现控制功能,对应的手动控制模块如图3 所示。

图3 手动控制功能模块
对于半自动操作功能模块而言,其主要是将图1中的工作流程按照顺序功能图实现。对于全自动操作功能模块而言,对于提升整条生产线的效率,降低车间内操作人员劳动强度具有重大意义。本工程将采用切换开关实现全自动工作模式与半自动工作模式的切换。
2.2 气动元器件的选型
根据气动机械手的控制需求,需要为其配置单向阀、单向节流阀和先导式电磁阀等类型的阀门。其中,单向阀主要对气流的方向进行控制,从而实现对气动元器件动作方向的控制。单向节流阀主要对气流的速度进行控制,从而实现对气动元器件运动速度的控制;而且,单向节流阀还可应用于延时回路的控制中。根据实际控制需求,为气动机械手配套的JSCL 型单向节流阀;所配置的先导式电磁阀为三位五通电磁阀,具体型号为TG2512-06 型。
气缸为气动机械手的关键执行部件,其主要将空气的压力能转换为机械能。根据结构和功能的不同,典型且应用较为广泛的气缸包括有普通气缸、无杆气缸、摆动气缸、气爪等。对于气动机械手而言,在水平和垂直方向控制采用无杆气缸,该气缸的缸径比远大于活塞杆气缸,其定位精度较高、安装空间较小,比较适用于长行程且小缸径的应用需求。
对于气动机械手旋转180°的控制需求选用摆动气缸。气爪为实现气动机械手抓取物件的核心部件,根据结构不同可分为平行气爪、摆动气爪、旋转气爪以及三点气爪等。本工程所设计的机械手为圆柱坐标式,故选用三点气爪。为气动机械手所配套的气缸类型及型号如表1 所示。

表1 气动机械手气缸类型及型号
2.3 气动回路设计
气动机械手要求无杆气缸在水平方向的伸缩、垂直方向的升降动作进行控制;要求旋转气缸在回转方向进行控制;要求气爪缸对气爪的抓取和泄放进行控制。因此,面临上述的控制需求,对每类型气缸的进气口和出气口采取双调速回路进行控制。双调速气动回路如图4 所示。
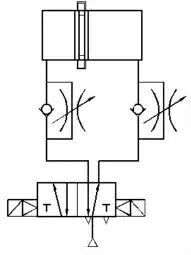
图4 双调速气动回路示意图
3 机械手的PLC 控制
针对机械手的控制需求,采用PLC 控制器实现最终的控制目标。对于机械手的全自动和半自动控制目标,要求其具备顺序控制的功能。根据图1 中机械手的工作流程,并考虑到当机械手在实际工作中面临停电或者故障等不可预料的问题,要求顺序控制功能中设置手动操作。设计如图5 所示的PLC 控制流程。
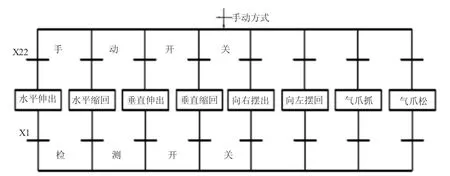
图5 机械手PLC 顺序控制流程
根据图5 的顺序控制流程图编辑PLC 控制的软件,并对其软硬件进行测试。总整体上讲,所设计的气动机械手具有较高的控制精度且设备在实际操作过程中完好。在测试过程中,重点对机械手的控制精度进行验证,验证结果如表2 所示。
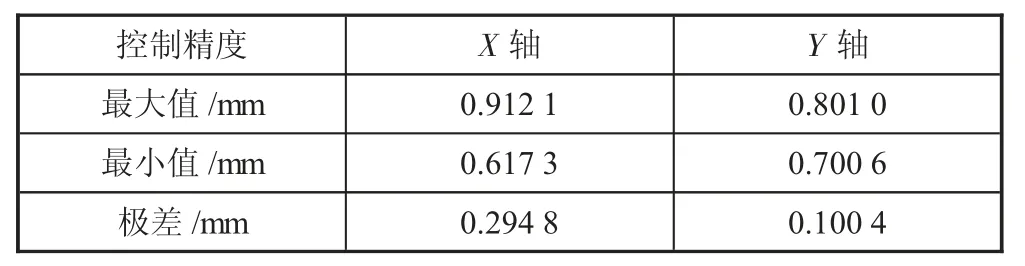
表2 机械手控制精度测试结果
如表2 所示,所设计的机械手在X 和Y 轴两个方向的控制精度均小于1 mm,满足机械手的定位精度要求。
4 结论
机械手为当前工业生产中必不可少的高精密设备,其在一定程度上提升工业制造的效率,提高产品质量的同时降低作业人员的劳动强度。本文主要针对气动机械手开展了系列研究,总结如下:
1)根据实践应用需求,最终确定采用圆柱坐标式结构的气动机械手。
2)根据气动机械手的功能需求,完成了单向阀、单向节流阀以及三位五通换向阀的选型;同时,结合气动机械手的动作控制目标,采用无杆气缸对水平和垂直方向的动作进行控制;采用摆动气动对其旋转动作控制;基于气爪缸实现抓取物件的功能。
3)经实践测试表明,所设计的气动机械手控制精度小于1 mm,具有较高的定位精度。
猜你喜欢
池州学院学报(2022年3期)2022-08-11 05:34:12
湖北农机化(2020年4期)2020-07-24 09:07:42
宇航计测技术(2018年3期)2018-09-08 02:21:36
现代机械(2018年1期)2018-04-17 07:29:36
物联网技术(2017年7期)2017-07-20 14:09:05
软件导刊(2016年9期)2016-11-07 21:35:42
通信电源技术(2016年5期)2016-03-22 01:09:49
石油知识(2016年2期)2016-02-28 16:20:16
自动化仪表(2015年11期)2015-04-01 01:02:40
纺织导报(2014年9期)2014-10-31 00:07:58
