基于原位探测的高空气球风场数据修正方法
2023-08-30 03:17崔宇轩苗景刚
计算机测量与控制 2023年8期
崔宇轩,苗景刚
(1.中国科学院 空天信息创新研究院,北京 100094;2.中国科学院大学 航空宇航学院,北京 100049)
0 引言
临近空间(near space),也叫“近太空”或“高高空”,通常是指距地面20~100 km[1]高度之间的空间范围,在大气分层结构中处于平流层和中间层。这一空间高于一般航空器可控飞行的高度,而又低于航天器维持近地轨道飞行的最低高度,是一个待开拓的空间圈层。这一区域介于传统航空器的飞行高度和航天器的轨道高度之间,因为其独特的高度和环境特征,具有巨大的发展潜力。
高空气球(以及超压气球)作为临近空间平台的一种,其飞行高度在平流层范围内,且与飞机、滑翔机等传统飞行器不同,高空气球对发放场地要求不高,几乎可以在任何地点发放[2],并同时具备着发放准备周期短,飞行成本低等优点,可以为科学研究和各种高空任务提供了一种低成本的稳定平台。高空气球不同于需要耗费大量能源维持动升力的传统飞行器,其主要依靠自身比重低于空气从而获得静浮力升空这一特性实现驻空[3]。这一特性使得高空气球不同于传统耗费能源维持动升力的飞行器,高空气球具有了驻空时间长,低能耗等特点[4],成为了临近空间飞行器技术的主要研究方向之一。
但高空气球主要依靠净浮力这一特性,也导致了其主动控制能力较弱。因此,现代高空气球一般通过调节浮重平衡来控制垂直方向上的运动,从而间接地利用风层实现路径控制[5]。在这一领域,谷歌公司利用强化学习方法来进行对高空气球的飞行任务分析、规划和控制,进而做出飞行控制决策,并最终实现了月级的区域驻空目标[5]。谷歌团队的Marc Bellemare等人通过人工智能控制器能根据风的历史记录、预报、局地风观测和其他因素(如氦气损失和电池疲劳),决定如何移动气球从而依靠风速和风向的变化来飞行到任务所需位置。高空气球能否有效地利用风场对其实现飞行轨迹控制起着决定性的作用,因此有效提升飞行空域风场预报数据的精度和准确度十分重要[6]。目前在实际实验和仿真过程中使用的风场预报数据主要来自于美国国家环境预报中心NCEP数据、欧洲气象局ECMWF数据、以及国家气象台GRAPS数据以及中山大学ReMAPS数据。以上各个数据源通常提供全球未来10天左右的气象预报数据,通过格点形式记录风速、高度、温度、相对湿度等信息,格点密度从0.25°×0.25°到0.5°×0.5°经纬度,高度分层通常包含从0~1 kPa共10或21个等压面风场分层。
现有预报模型的预报尺度较大,其等压面层数及预测精度可以满足飞机、火箭等部分高速飞行器的气象数据需求,但对高空气球这种低速飞行器来说,此预报数据一定程度上存在着精度低和实时性差等问题。领域内目前对于高空气球的实际飞行实验和仿真模拟过程中,普遍选择基于ECMWF模式风预报产品对风场环境进行判断,并进而通过调节高空气球飞行高度来完成区域驻留的目标,其有效驻留控制半径在100 km以上[7]。但这对于高空气球这一低速飞行器来说,此控制精度还有着一定问题,尤其是在对高空气球落点判断这一及其依赖风场环境准确度的方面。因此,就高空气球飞行实验领域而言,目前的气象预报数据在一定程度上存在着数据稀疏、精度不足、实时性差等问题。
原位数据指通过相关探测手段,从而直接观测到的位于探测点的真实数据。在执行高空气球的飞行试验任务时,其所需原位数据的获取主要来自探空气球以及高空气球自身的测量设备。进行高空气球飞行试验时,在试验期间以及发放前均会释放探空气球进行风场环境探测,且高空气球在执行飞行任务时同样会携带相应可以探测风场数据的载荷来获取自身所在位置的风场情况。
高空气球本身无动力,随风飘飞。其自身即可作为风场测量平台进行原位探测;且在执行高空气球飞行试验任务期间,实验人员将会在所需地点按照飞行需求发放探空气球。因此,在原位探测数据的数据量相对充足的前提下,本文提出了一种基于原位探测数据的针对高空气球特定飞行任务需求的风场数据插值与修正方法。
1 高空气球飞行平台
经过几十年的发展,高空气球的能力和可靠性已经有了大幅提高。国外方面,美国自二十世纪六七十年代起,便已经开始利用高空气球进行各种高空观测和试验任务[8]。在1986年挑战者号航天飞机事故使得大量任务被迫停滞的背景下,美国国家航天局(NASA)进一步意识到航天飞机的局限性,在高空气球方面经验丰富的NASA随即提出在极地进行长时间气球飞行的长航时气球(LDB,long duration balloon)计划[9-10],以部分替代航天器开展任务,并逐步形成规模,一些原本无望实现的任务得以再次执行。在1997年,NASA针对气球飞行时间相较卫星而言太短的问题,进一步提出了超长航时气球(ULDB,ultra long duration balloon)计划。日本于20世纪初期在南极洲的Syowa站开展了PPB(polar patrol balloon)计划[11],通过高空气球这一平台来进行地球物理观测。
在我国,中国科学院于20世纪80年代建立起完整的高空气球系统并完成了大量的飞行。在超压气球研究方面,中科院在20世纪末便已经着手进行超压气球的相关理论研究[12]和小型超压气球的研发和制作。中国科学院在此方面多次开展相关实验,并于2018年3月启动了A类战略性先导科技专项——“ 鸿鹄"专项。该专项以“认得清、留得住、用的上”为总目标,将突破一系列浮空器相关关键技术,构建我国第一个临近空间科学实验系统,加强对临近空间的认识[13]。
2 风场数据插值与修正方法
现有的风场数据处理方法可大体上分为两类,即基于相关数学处理手段的插值方法和基于气象学知识的风场数据修正方法。基于数学处理手段的插值方法是通过采用数据处理中较为常见的方法,如双线性插值、多项式插值、最邻近插值等方法,较为直接地将实测数据插入到原始预测数据中。如Jardin等[14]首先构建出风场格点网络,并继而选择采用全局多项式插值这一传统数据处理方法进行直接插值处理,最终得到了新的风场格点数据。柳婧[15]使用最优插值算法将海面风矢量进行了插值融合。董志南等[16]采用了多种插值方法进行了插值实验,并结合实测风场风速数据进行了对比验证,最终认为空间插值方法可以有效地模拟出所需区域的风场环境信息。以上这些以及其他基于数学处理手段的插值方法,通过其模型原理可知,此类方法具有传统数据处理方法的快速、数据量要求小及应用范围广等优点。但是,高空气球的飞行领域为平流层这一大尺度的飞行高度,平流层风场环境具有着数据量小、采样难度高、且实测数据无法在时间和空间上高度连续等问题[17],因而在高空气球这一领域,对传统的基于数学处理手段的直接插值方法应用较少。
基于气象学知识的风场数据修正方法则是通过结合风场的相关基础特性,在对原始的预报数据和实测数据进行一定的处理后,进一步将两者进行融合修正,从而得到最终所需风场信息。Bellemare[5]使用高斯过程将气球数据与风预测融合在一起,将预测数据与气球数据加权平均,并产生方差。Gandin[18]将最小方差作为约束条件,进而使用最优插值法进行了风场融合插值,最终得出所需的风场融合数据。朱成阵等[19]使用了气象学专业较为传统的内插外推法,收集所需位置的风场的实测数据和气象预报数据,结合气象学相关知识结合最小二乘法将线性风模型与预报风数据进行了融合。但由于风场模型较为复杂,基于气象学知识的风场数据修正方法对计算机算力要求较高,且对与高空气球所处平流层这一大尺度飞行区域,传统的基于气象学知识的风场数据修正方法存在着计算缓慢、算力不足等问题。
现有的风场数据插值与修正方法时间和空间尺度较大,需要较多的历史数据来拟合插值函数;而对于高空气球试验任务来说,其所需预报风场的范围较小,但对实时性和精度要求较高。综上所述,基于高空气球的试验需求,为了解决目前风场数据修正方法面临的算力要求高、时效性不强及可用实测数据集小且数据密度稀疏等问题,进行实时的风场数据修正,本文提出一种基于原位数据(ISD,in situ detection)的气象数据实时插值修正方法。通过使用中国某地区的历史数据寻找修正函数,并采用2022年7月的气象预报数据依托于中国科学院空天信息创新研究院飞行试验平台,对本方法进行了实验验证。
3 基于原位探测的风场插值模型理论
针对高空气球这一特殊应用需求,本文提出了ISD风场插值修正方法,方法通过在高空气球执行飞行试验的区域释放探空气球,从而获得所需的原位探测数据(探空气球实测数据和高空气球自身实测数据),进而对指定区域的风场预报数据实时地进行插值修正,最终得到准确度更高、时效性更强的风场数据。本文以在中国某地区进行的高空气球试验为例,采用ISD模型对模式风预报产品的预测数据进行了修正,介绍了使用历史数据来选取ISD中相关参数的方法,最终通过实际飞行数据进行了方法验证。
提出的ISD风场插值方法是一种改进的融合插值类修正方法,方法主要包含以下3个部分:1)原始数据收集与处理,获取模式风产品原始预报数据得到预测风场网格,获取原位探测数据得到观测风场网格;2)构建基于ISD理论模型中的误差衰减模型得到误差场修正网格;3)确定适用于高空气球飞行试验领域的修正参数d0;4)将预测风场作为背景场,误差观测风场作为修正场,两者叠加得到最终所需风场。
3.1 ISD理论模型
数据模式发展至今,系统误差依然存在。本文针对系统误差这一问题,以目前高空气球实验使用较为广泛的CFSv2模型NCEP气象预报数据模式风产品为例,通过整体趋势上的模型修正从而提高模式风预报产品的准确性。
为了减小模式风预报产品的系统误差,本文将实时探测所得到的原位数据作为修正因子融入预报模型,进而得到风矢量误差格点数据,并进一步进行格点化数据修正,从而建立基于原位数据(ISD)的气象数据实时插值修正模型来提高预报风场数据的准确性和实时性。
曾晓青等[20]基于T639模式资料对北京地区20个站点进行风向、风速的MOS研究表明,提出了多种格点误差的订正方法,对预报风场结果展开了订正实验,结果表明使用经向风和纬向风的订正效果比直接使用总风向的订正效果更优。
故本方法亦选参考经纬向风速分解的思路,将预测及观测的风速、风向数据联合,分解为东西方向的风矢量——u风,及南北方向的风矢量——v风,分解公式如下:
(1)
式中,dir为风向(°);spd为风速单位(m/s);u和v分别为东西方向风和南北方向风 (m/s)。
绘制ISD技术路线如图1所示。
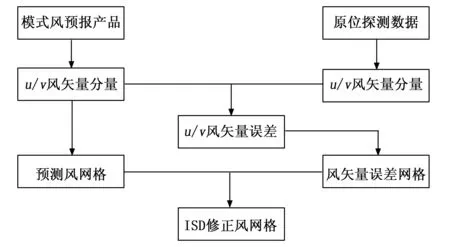
图1 技术路线图
ISD模型技术路线如下:
1)分析解包初始模式风预报产品,得到初始风的风场网格格点图。
2)引入原位探测数据,并对原位探测数据进行u/v风矢量分解,进而得到风矢量误差E。
3)构造误差衰减函数,分别对u/v风矢量进行拟合,得到经向风和纬向风各自的误差衰减函数,进而形成新网格风矢量误差网格格点图。
4)将模式风预报产品所生成的预测风网格与风矢量误差网格融合,最终得到基于原位探测数据的修正风网格数据。
3.2 误差函数模型
风作为一种空气流动产生的自然现象,风速具有连续性[21],不难理解,前文得到的风速适量误差E应与空间位置有着较高的关联性,即对最临近的预报影响最大,准确率也最高,随着修正格点与实测格点距离的增加,影响可能会减弱,因而需要引入与距离相关的权重λ来调节,将经过权重调节后的误差订正到临近格点上(式(3)),得到最终订正场。
E=O-Y
(2)
(3)
(4)
式中,E为该点误差,O为原位探测数据,Y为模式风产品的预测风速数据,λ为误差修正系数,d为修正点与探测点之间的欧式距离,d0为有效修正范围参数,Y′为修正后风速数据。在ISD理论模型中,有效修正范围参数d0对模型的修正效果影响较为直观,d0的选取受与试验任务要求限制。
4 仿真校验和对比分析
4.1 数据集
进行风场数据修正的目的是为了提高初始模式风预报产品的网格精度以及准确率,即尽可能地贴近真实风场情况。在进行ISD模型实验验证时,预报风场预报数据主要来自于美国国家环境预报中心CFSv2模型的NCEP数据,以往的高空气球飞行试验也以CFsv2模型系列模型作为参考,历史数据也验证了CFsv2模型的可靠性。所以选择CFsv2模型的2021年9月的模式风气象预测产品作为预测风数据来源进行实验。考虑到高空气球的驻空阶段一般驻留在平流层的底部区域,距地面20 km左右,位于50 hPa大气压等压面附近,所以仿真数据集参数选择为选择50 hPa等压面模型的0.25°×0.25°经纬度网格格点。原位探测数据则选择2021年9月于飞行区域位置释放的探空气球所观测数据。为了评价ISD理论模型的修正效果,需要将真实风场数据与ISD模型修正风数据进行对比。但考虑到在20 km高度处,实测得到真实风场数据仅为相关探测装置自身飞行路径上的数据,即难以大面积获取该高度的风场数据,且经过以往的实际实验过程验证,可以将再分析数据作为实际风场数据。另一方面,为了避免预测数据与再分析数据采用同一模型产生耦合,最终选择欧洲中期天气预报中心(ECMWF)的系列气象再分析模型产生的再分析气象数据作为实际风场数据。在本文的仿真实验中选择ERA系列最新的ERA5模型50 hPa等压面模型的0.25°×0.25°经纬度网格格点风场数据。
4.2 评价指标
为定量地对ISD模型进行客观评价,本小节引入相关误差评价指标。考虑到高空气球有效驻留控制半径在100 km以上[7],选取以原位探测点为圆心,200 km距离为半径的圆形区域作为数据评价区域。误差评价指标采用平均相对误差(MRE)来反映模拟值对于观测值的准确度。平均相对误差的计算公式为:
(5)
式中,m为所选评价区域内格点数量,O为原位探测数据,Y为模式风产品的预测数据,Y′为修正后风场数据,下标i为评价区域内所选择的第i个格点数据。
4.3 修正仿真校验
为验证基于ISD模型对模式风预报产品进行修正后的风场数据对实际风场特征的拟合能力,实验选择中国某地区地区2021年09月第一个星期50 hPa等压面气象数据进行仿真实验。下文中绘图所选用数据时间以05日UTC时间12时50 hPa等压面气象数据为例。
4.3.1 修正实验可视化
为使实验数据可被直观地表示,选择采用绘制风场矢量箭头图的方法,将数据可视化显示。
解包原始模式风产品气象数据如下,并绘制初始模式风预报产品如图2、3所示。
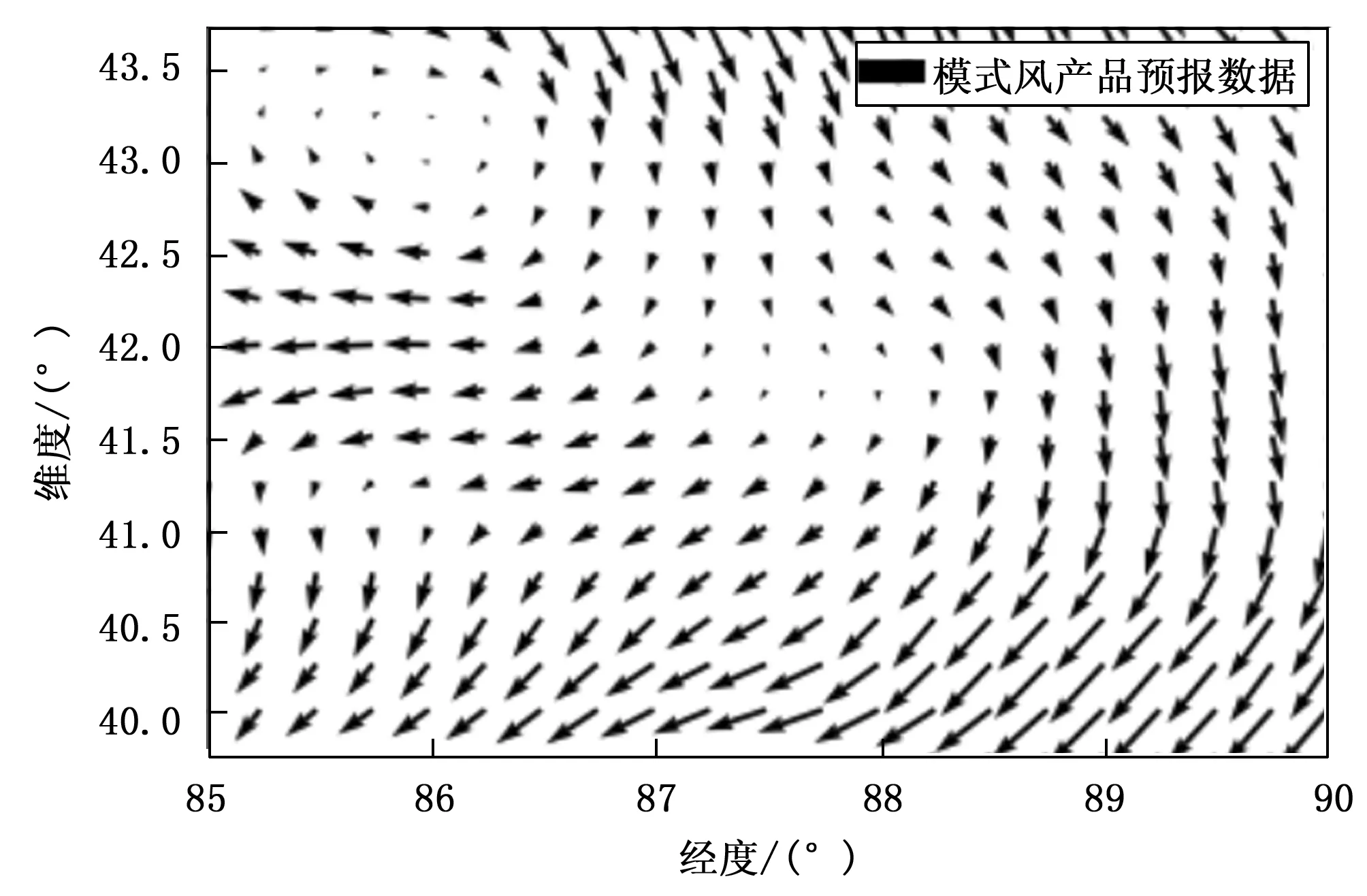
图2 初始模式风产品
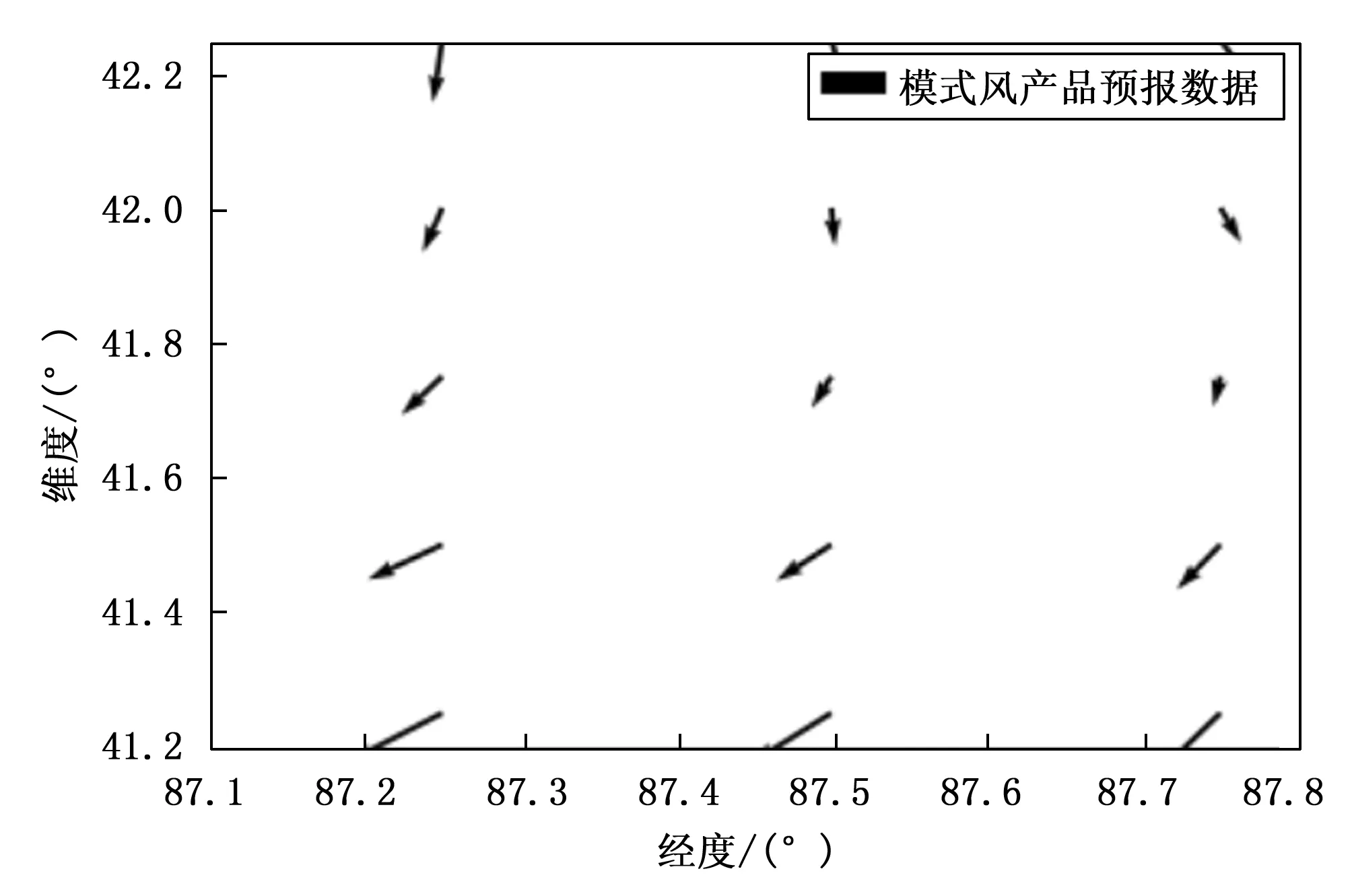
图3 初始模式风产品(局部放大图)
在获取探空数据(原位数据后,由ISD模型进一步得到风矢量误差矢量,如图4、5所示。
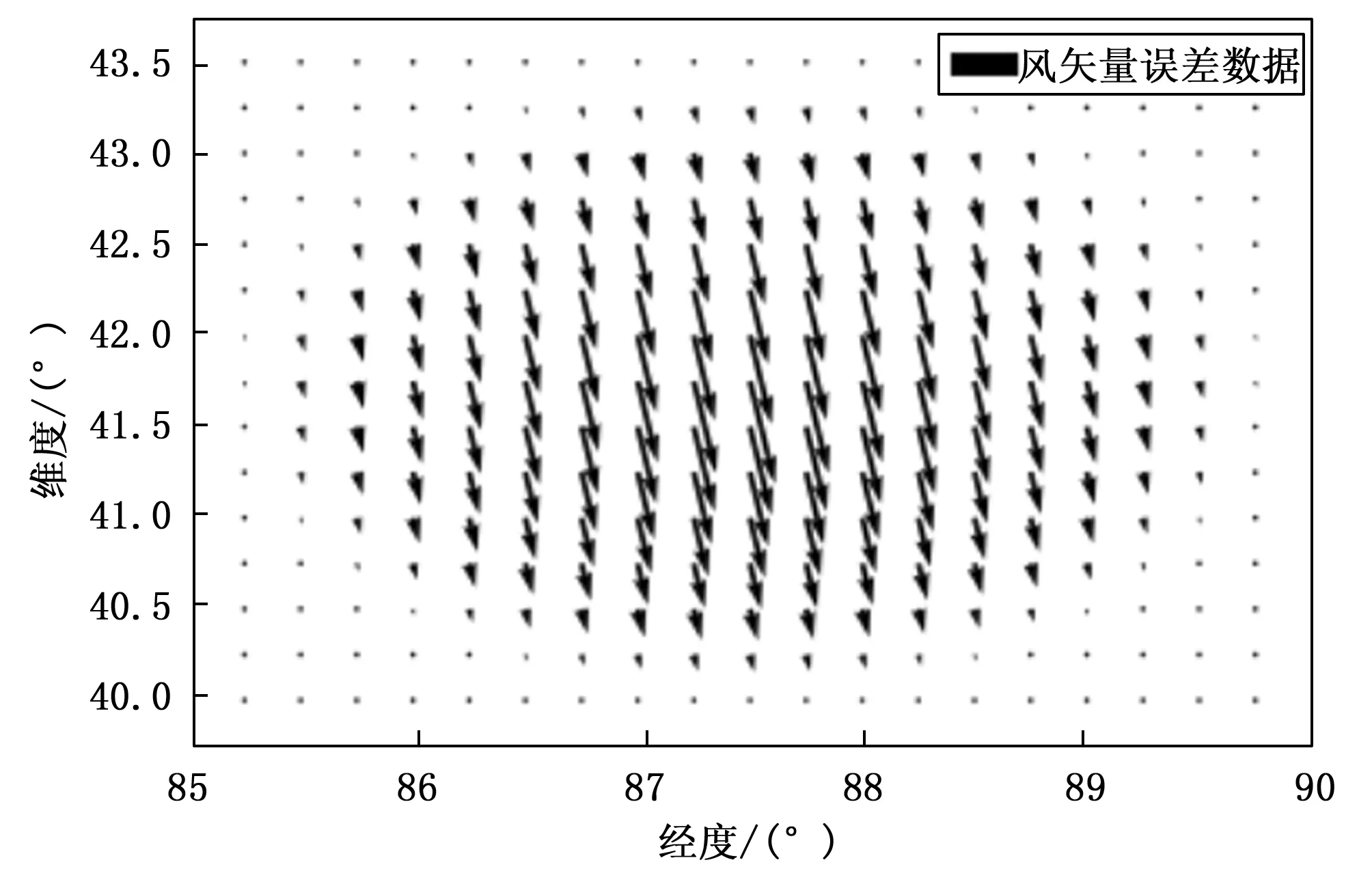
图4 风矢量误差图
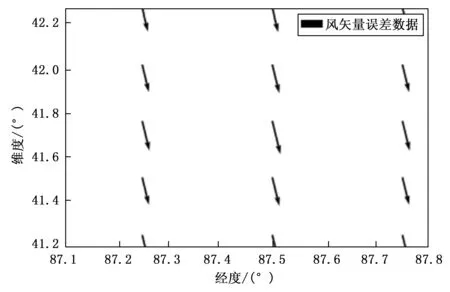
图5 风矢量误差图(局部放大图)
由图4、5可较为直观地看出,风矢量误差随着与实测数据点空间距离的增大而减小。将所得到风矢量误差场叠加至模式风产品上进而可得修正对比如图6、7所示。
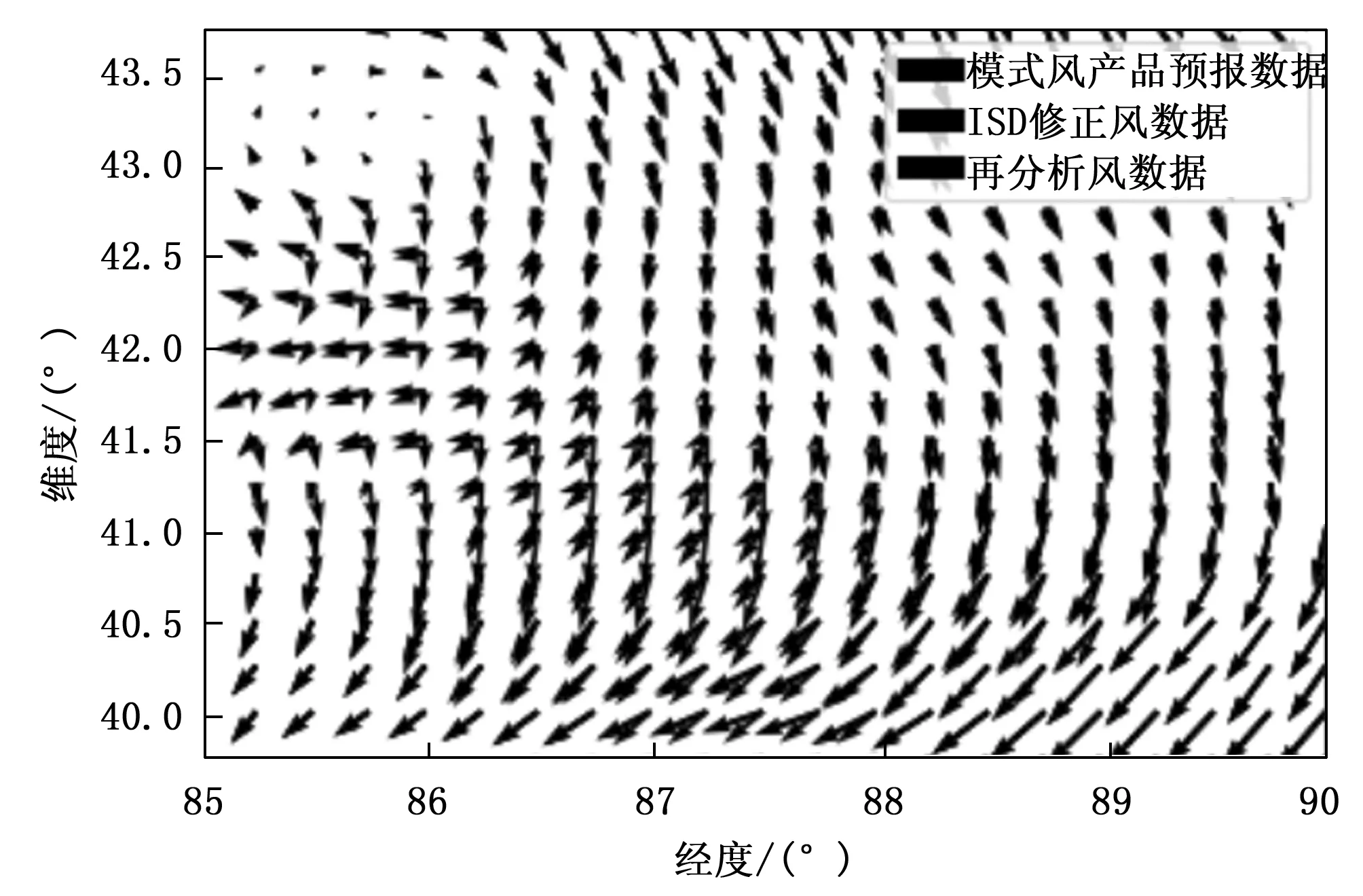
图6 修正对比图
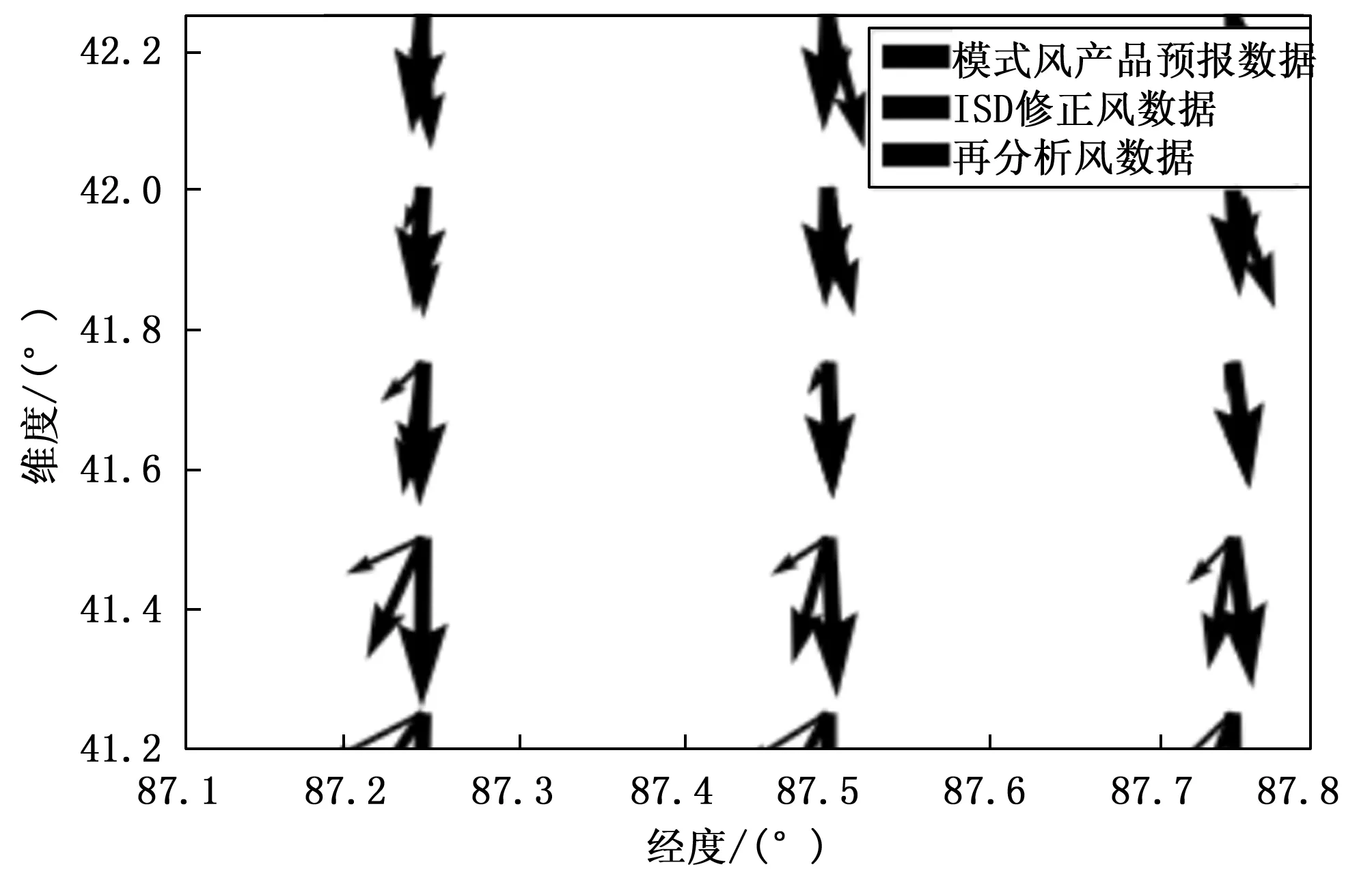
图7 修正对比图(局部放大)
图6、7中,横坐标为经度,纵坐标为维度,风速大小与箭头长度正相关,最细箭头为模式风产品初始预测风场数据,最粗箭头为再分析风数据即真实风场数据,最后一种箭头为基于ISD模型修正后的风场数据。从图中可以看出,ISD修正风数据与真实风场风矢量的夹角要比模式风产品的预报数据与真实风场风矢量的夹角小,且长度也更加接近,即ISD修正风数据与实际风场数据更为贴近,可达到提高模式风预报产品准确度的研究需求。
4.3.2 数据指标评价
为了对ISD修正方法的修正效果进行严谨客观的评价,选取09月第一个星期的数据进行ISD修正实验,并分别求取每组数据的u/v风矢量模式风预报产品的初始MRE及分别选取d0为200 km、500 km、1 000 km、2 000 km时的ISD修正风产品MRE,将模式风预报产品的MRE记为初始模式风,ISD修正风产品的MRE对d0选择一致的组取绝对值后求均值,最终可得,各项误差评价指标均值如表1所示。
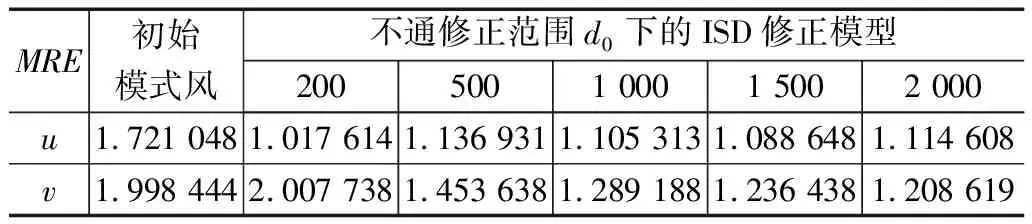
表1 ISD选取不同修正范围的MRE
从表1可知,在使用ISD模型进行误差修正时,ISD数据修正方法对风场数据的MRE有减小作用,u矢量风MRE随着修正范围d0的增大而增大,而v矢量风MRE随着修正范围d0的增大而减小考虑到风速信息再时空中为连续值,ISD修正方法基于原位探测技术,原位探测对与探测位置距离近的格点影响更大;及d0越小,ISD方法的修正效果应越优。但在v矢量风修正范围d0为200 km时,ISD修正风的MRE大于初始值。考虑到预报存在一定的不确定性,且有突发恶劣天气等情况,对数据集进行检查。
经检查后发现,在2021年09月06日15时(UTC时间)的预报存在较大误差,v矢量风初始预报结果MRE达到-29.93,详细数据如表2所示。
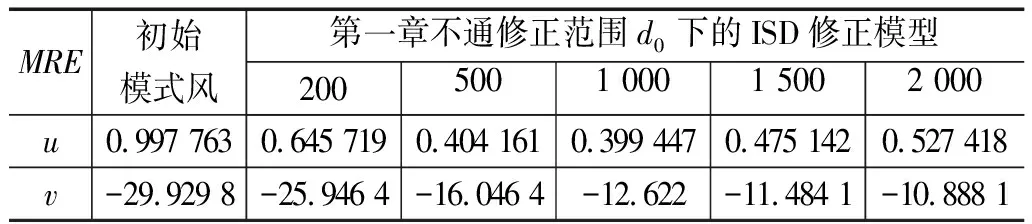
表2 09月06日15时数据(UTC时间)
由表3可知,ISD修正方法可降低模式风预报产品的平均相对误差(MRE)且修正范围参数d0越小,修正效果越优。考虑到上文2.2小结中分析d0最小为200 km,故针对高空气球飞行试验领域ISD修正方法修正参数d0选为200 km。
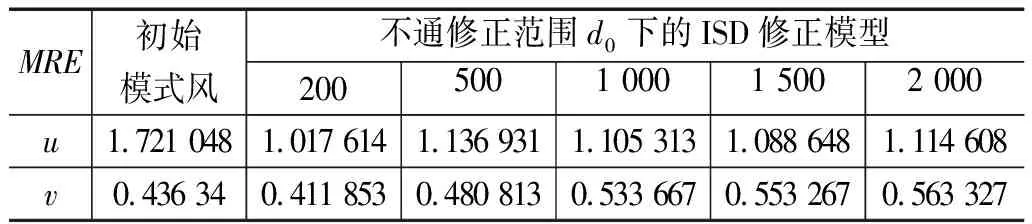
表3 ISD不同修正范围的MRE(剔除异常数据)
4.4 实验验证
借助中科院高空气球实验平台对ISD修正方法进行实验验证,如图8所示。

图8 中国科学院某高空气球飞行实验
使用中国某地区探空数据对模式风产品使用ISD修正方法进行修正(修正参数d0选取为200 km),并使用高空气球搭载风速计等所需测量设备,最终通过高空气球球载设备所测实际风速数据对ISD修正风结果进行检验。
在实验验证过程中,将探空气球实测数据做为ISD修正模型所用的原位探测数据,对初始模式风预报产品进行修正;并将修正后的预报数据与高空气球自身所测风速进行对比验证。
探空球实测得到所处飞行区域50 pha高度处u风-0.797 m/s,v风2.243 m/s,初始模式风预报产品显示该飞行区域50 pha高度u风-5.206 m/s,v风0.714 m/s;高空气球飞行实测50 pha飞行区域u风-2.782 m/s,v风1.401 m/s,初始模式风预报产品显示50 pha飞行区域u风-5.200 m/s,v风0.600 m/s。
使用ISD修正方法,基于探空实测数据进行修正,修正参数d0默认选为200 km,可得高空气球飞行位置修正风速信息为u风-1.379 m/s,v风1.92 m/s。u风误差由2.418 m/s变为1.403 m/s,降低了41.98%;v风误差由0.801 m/s变为0.519 m/s,降低了35.21%。
5 结束语
面对稀疏的平流层风场数据,本文基于原位探测数据提出一种针对飞行任务所需范围内的平流层风场水平分量数据的修正方法,有效地提升了模式风预报产品的准确度,并得出以下结论:
1)将模式风产品预报数据与原位探测数据相结合,通过提高对原位探测数据的价值的进一步挖掘,提高了模式风产品的预报准确度。
2)仿真结果表明,ISD修正方法可减小风场预测数据的平均相对误差(MRE),且ISD方法对东西风分量的修正效果优于南北风分量。
3)实验结果表明,并在实际飞行实验任务过程中将u风的误差由2.418 m/s变为1.403 m/s,降低了41.98%;v风误差由0.801 m/s变为0.519 m/s,降低了35.21%。在计算速度方面,基于ISD模型的修正方法计算耗时均低于40 s,可满足高空气球飞行任务需求。
初步实验结果验证了ISD修正模型对提高模式风预报产品的作用,但目前相关的实验验证次数略显不足,应在后续实验中继续进行对ISD修正模型的验证和完善。
猜你喜欢
环球时报(2022-02-28)2022-02-28
成都信息工程大学学报(2021年5期)2021-12-30
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
天然产物研究与开发(2018年5期)2018-06-13
能源(2017年8期)2017-10-18
通信电源技术(2016年1期)2016-04-16
火炸药学报(2014年1期)2014-03-20
河南科技(2014年12期)2014-02-27