单孔机器人手术治疗早期宫颈恶性肿瘤中国专家共识(2023版):附视频
2023-08-29 00:28中国妇幼保健协会妇科智能医学专业委员会
机器人外科学 2023年6期
中国妇幼保健协会妇科智能(AI)医学专业委员会
摘 要 宫颈癌发病率在我国妇科三大恶性肿瘤中居第一位,微创手术已广泛应用于早期宫颈癌的治疗中。机器人手术治疗早期宫颈癌在国内外已开展多年,2018年上海长征医院在国内率先开展经脐单孔机器人宫颈癌根治术。此后,国内多家医院逐步开展该手术,但尚未形成专家共识。基于此,我国多位专家根据本单位开展单孔机器人早期宫颈癌手术的经验,结合宫颈癌外科治疗的最新理论和指南,制定了经脐入路单孔机器人早期宫颈癌根治术的专家共识。
关键词 机器人辅助手术;单孔复腔镜;早期宫颈癌;专家共识
中图分类号 R608 R713 文献标识码 A 文章编号 2096-7721(2023)06-0578-15
Chinese expert consensus on robot-assisted single-site surgery for early-stage cervical cancer (2023): with video
Gynecological Intelligent (AI) Medical Committee of Chinese Maternal and Child Health Association
Abstract The incidence rate of cervical cancer ranks first among the three major gynecological malignancies. Minimally invasive surgery has been widely used in the treatment of early-stage cervical cancer. The treatment of early cervical cancer by robot-assisted surgery has been carried out for many years in China and foreign countries. Transumbilical robot-assisted single-site surgery for cervical cancer has been performed by many hospitals in China since it was firstly performed by surgeons from Shanghai Changzheng hospital in 2018, but there was no expert consensus has been reached yet. Therefore, several medical experts in China developed an expert consensus on trans-umbilical robot-assisted single-site surgery for early-stage cervical cancer based on their own experience combing with the latest theory and guidelines on surgical treatment of cervical cancer.
Key words Robot-assisted surgery; Single-port laparoscopy; Early-stage cervical cancer; Expert consensus
收稿日期:2022-11-16 录用日期:2023-06-09
Received Date: 2022-11-16 Accepted Date: 2023-06-09
基金项目:军队临床研究项目(2020YLCYJ-Z10)
Foundation Item: Military Clinical Research Project (2020YLCYJ-Z10)
通讯作者:刘晓军,Email:liuxiaojun@smmu.edu.cn
Corresponding Author: LIU Xiaojun, Email: liuxiaojun@smmu.edu.cn
引用格式:中國妇幼保健协会妇科智能(AI)医学专业委员会. 单孔机器人手术治疗早期宫颈恶性肿瘤中国专家共识(2023版):附视频[J].机器人外科学杂志(中英文),2023,4(6):578-592.
Citation: Gynecological Intelligent (AI) Medical Committee of Chinese Maternal and Child Health Association. Chinese expert consensus on robot-assisted single-site surgery for early-stage cervical cancer (2023): with video [J]. Chinese Journal of Robotic Surgery, 2023, 4(6): 578-592.
进入21世纪,机器人辅助手术作为一种新兴的微创手术方式在医院迅速普及,其在妇科手术中的应用已成倍增长。美国食品药品监督管理局在2005年批准达芬奇手术机器人应用于妇科手术[1]。我国于2008年引入达芬奇手术机器人并将其应用于临床,随着我国卫健委将达芬奇机器人手术系统纳入“十二五”甲类大型医用设备配置规划,我国大型医疗中心陆续引进该系统并取得了良好效果[2]。如今,机器人辅助手术已被广泛应用于妇科子宫切除术、子宫肌瘤切除术、阴道骶骨固定术、附件手术及部分恶性肿瘤手术[3]。
目前,虽然机器人手术系统在术野清晰度、操作精准度及学习曲线上要明显优于普通腹腔镜手术,但同样需在腹壁做4~5个穿刺孔,而单孔腹腔镜迅速普及后,多孔机器人手术系统需要在患者腹壁上做4~5个穿刺孔会大幅降低其应用价值。但是,单孔腹腔镜在治疗妇科恶性肿瘤方面的局限性也是显而易见的,比如手术操作难度大,对术者要求高,学习曲线明显延长,手术时间、术中出血、手术精准度均不如多孔腹腔镜,更无法和多孔机器人手术相比。而机器人单孔手术可以摒弃两者缺点,结合两者优势,提升手术治疗的精准性和微创性。
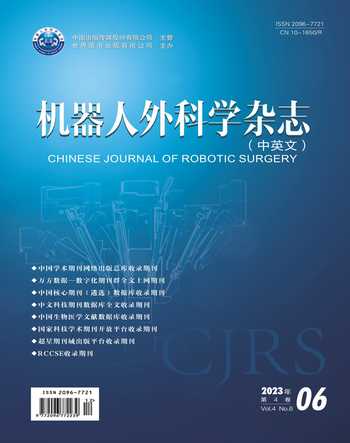
2006年,Sert B M等人[4]报道了世界首例机器人子宫颈癌根治术。2009年,Fader A N等人[5]报道了世界首例妇科机器人辅助单孔腹腔镜手术(Robot-assisted Laparoendoscopic Single-site Surgery,R-LESS),开启了将该技术应用于妇科的先河。2013年,Intuitive Surgical公司在达芬奇手术机器人的基础上,生产了单孔机器人专用手术器械及专用入路装置(Port),恢复了手术操作三角,降低了手术难度,使得手术操作更简便、易行,缩短了单孔腹腔镜手术学习曲线(如图1~2)。Fagotti A等人[6]率先利用该装置实施了子宫全切术。
2015 年,Sinno A K等人[7]报道了全球首例R-LESS 完成的ⅠB1期宫颈癌根治术,未发生切口出血、感染、血管神经损伤等相关并发症,证实了R-LESS在宫颈癌根治术中的可行性。Vizza E等人[8]在2018年报道了20例利用单孔机器人实施广泛子宫切除及盆腔淋巴清扫术的病例,其平均手术时间和出血量与多孔机器人相类似,表明该术式治疗早期宫颈癌具有一定可行性和安全性。R-LESS能够成功实施复杂的宫颈癌手术,主要基于其以下优势:①机器人手术系统的高清三维成像技术可以使手术视野放大10倍,且具有3D显示效果,能弥补视觉深度感的缺失,使术者能较传统腹腔镜下更精准地辨认解剖结构和操作距离,从而提高手术的精准性;②R-LESS平台的控制系统可自动滤除手术过程中的人手抖动,使手术操作更为稳定;③机器人机械臂的腕式结构可以使器械末端實现360°的灵活运动,在一定程度上克服了单孔腹腔镜中器械平行操作带来的“筷子效应”,提高了在盆腔深部及局部狭小空间内的可操作性和精准性,从而降低了手术操作难度;④通过控制台内置软件调节,将器械重新分配,成功实现左手、右手切换,克服了单孔腹腔镜左右手互换带来的视觉及思维混乱,更符合人体工程学,降低了手术难度,相应地缩短了手术医师的学习周期;⑤R-LESS平台可明显减少器械碰撞,降低床旁助手的操作难度,减少器械拥挤感,减轻术者及助手的疲劳感;⑥R-LESS可利用人体脐部的天然瘢痕进行操作,能够隐藏腹部瘢痕,实现腹部手术的无瘢痕化,不仅美容效果好,还可以减轻术后切口疼痛[9]。
2018年,上海长征医院妇科刘晓军团队利用Si级单孔机器人在国内率先实施了单孔机器人宫颈癌手术[10]。目前,国内多家医院相继开展该手术,部分医院利用达芬奇Xi级机器人开展单孔机器人手术,还有医院经自然腔道实施单孔机器人手术(Robotic Single-site Surgery,RSS),表明RSS可以安全、有效地应用于妇科领域,但其在临床中的实际应用仍需不断探索[11-12]。
1 单孔机器人手术适应证和禁忌证
1.1 适应证
1.1.1 子宫颈癌
子宫颈癌ⅠA1期及ⅠA2期伴或不伴淋巴脉管浸润。
1.1.2 ⅠB1期浸润性子宫颈癌
子宫颈病灶最大径线<2 cm、术前病理提示为鳞癌或腺癌,术前影像学提示盆腔淋巴结阴性、无深间质侵犯、无淋巴血管间隙侵犯的低危型ⅠB1浸润性宫颈癌。
1.2 禁忌证
目前机器人手术同样需要气腹,而气腹状态与体位可能会使心肺疾病加重,单孔机器人多数经脐部入路,所以严重心肺疾病及严重脐部发育异常及脐部疾病是机器人辅助手术的绝对禁忌证,其余禁忌证多为相对禁忌证。随着术者技术和手术器械的发展,手术范围不断扩大,一些相对禁忌证将逐渐成为适应证。
1.2.1 绝对禁忌证
单孔机器人手术绝对禁忌证主要包括:①难以耐受全身麻醉的患者,包括有严重的心血管疾病合并心功能不全者、严重心律失常或严重呼吸功能不全的患者;②先天性脐部发育异常或脐疝患者;③盆腹腔广泛粘连患者,包括上腹部重度膨隆的弥漫性腹膜炎、有广泛的腹壁瘢痕或盆腹腔内广泛粘连者,先天性膈疝者;④严重凝血功能障碍及血液病患者,以及其他器官功能障碍不能行微创手术的患者。
1.2.2 相对禁忌证
单孔机器人手术相对禁忌证主要包括:①过度肥胖患者(BMI>28 kg/m2);②既往多次腹部手术史或感染性肠道疾病;③局限性腹膜炎或既往有可疑结核性腹膜炎;④轻度凝血功能障碍;⑤盆腹腔内巨大肿块,影响手术操作。
2 术前评估
2.1 明确病理类型
术前需明确宫颈癌的病理类型,多数通过病灶活检取得。为判断组织浸润深度,术前需行Leep刀手术或宫颈冷刀锥形切除术。目前该疾病的病理学类型仍以组织形态学为基础分为子宫颈鳞癌、子宫颈腺癌及其余特殊类型子宫颈癌3大类型。
2.2 评估子宫颈癌临床分期
初步的评估方法是通过妇科检查及影像学诊断,至少需要2名有经验的妇科肿瘤医生对患者进行妇科检查,并进行临床分期。患者术前需进行胸部CT及盆腔MRI检查,判断有无转移并协助临床医生进行临床分期,必要时需行PET/CT检查进一步排除全身其余部位转移情况。
2.3 评估邻近脏器(膀胱、输尿管、肠管)情况
患者有泌尿系统及消化系统症状,必要时可行膀胱镜、输尿管镜及肠镜检查,也可行CTU检查以明确上尿路是否存在肿块压迫情况。
3 术前准备
3.1 进入手术室前的准备
3.1.1 辅助检查
术前完善血检验(血尿粪便常规、肝肾功能、凝血、传染病等血检验)及相关辅助检查(B超、心电图、胸片、盆腹腔影像学检查),超过60岁患者需常规检查心脏彩超及肺功能,内科合并症患者应针对其自身疾病做相应术前检查,合并症患者术前还需明确所服用药物以及术前是否需要停药或更换药物,并进行常规的多学科诊疗专家组(Multidisciplinary Team,MDT)术前讨论。
3.1.2 术前谈话
术者应重视术前谈话与沟通,目前对子宫颈癌患者实施微创手术有重大争议,NCCN指南不支持ⅠB1期以上子宫颈癌患者实施微创手术,而国内的相关研究正在实施与完善中。国内2022年宫颈癌治疗指南未明确规定微创手术不能应用于治疗早期宫颈癌,故术前应充分告知患者及家属相关手术风险及各类手术方式可能的预后情况。
3.1.3 术前皮肤清洁
术前需清洁腹部特别是肚脐部位,术前常规备皮,排除阴道炎症并予阴道擦洗。
3.1.4 术前麻醉用药
术前可使用镇静剂及解痉剂,利于缓解患者术前焦虑,提高痛阈,抑制腺体分泌,减少麻醉的不良反应。
3.1.5 术前肠道准备
单孔机器人手术和一般机器人手术相比,因操作空间的局限性,对盆腔充分暴露要求更高,因此术前肠道的准备非常重要。术前可禁食1 d并补液,注意补液量及维持水电解质平衡。术前当晚可口服肠道清洁剂(聚乙二醇电解质散等),术日晨可行不保留清洁灌肠。经过充分肠道准备的患者术中肠道对手术影响小,便于顺利实施单孔机器人手术。
3.1.6 术前、术后预防深静脉血栓
静脉血栓栓塞症(Venous Thromboem-bolism,VTE)是妇科手术常见并发症,是盆腹腔手术后的严重并发症,也是恶性肿瘤患者围手术期死亡的第2大原因[13]。妇科恶性肿瘤手术后VTE发病率为 2.9%~19.8%,其发病风险较妇科良性疾病患者高约14倍[14]。故术前术后需做好评估及预防。患者入院后需行血栓高危評分,根据评分结果行相应处理,高危患者可待风险下降后再行手术。目前深静脉血栓预防措施主要包括机械预防和药物预防及两者结合,并鼓励患者积极下床活动。
3.1.6.1 机械预防措施:①弹力袜用于下肢DVT的初级预防。②间歇充气加压泵(Intermittent Pneumatic Compression,IPC),建议每天使用2~3次,1 h/次,治疗前需行血管B超检查明确患者下肢是否已存在血栓。
3.1.6.2 药物预防:目前常用的是低分子肝素,皮下注射,1次/d。对于低风险患者可术后24~48 h用药,对于中等风险的患者,可于术前12 h临时皮下注射1次;对于高危患者,可于术前2 h临时皮下注射1次。对于一般手术患者推荐预防7~14 d或直至出院;对盆腔恶性肿瘤等VTE高危患者,推荐使用低分子肝素预防4周[15]。
3.1.7 术前手术器械准备
术前应告知手术室手术所用器械,包括单孔Port及相应机器人器械(目前普通机器人器械可完成单孔机器人手术),对于身高较高的患者,行盆腔深部操作时,必要时需使用机器人加长器械,助手也需要使用加长器械辅助手术操作。
3.2 进入手术室后的准备
3.2.1 麻醉
进入手术间后,医生、麻醉师及护士需行三方手术安全核查,而后建立静脉通道,连接监护仪器,再进行气管插管全身麻醉。
3.2.2 体位
患者可采用膀胱截石位或人字位(“人”字位体位摆放简单易操作,并可避免长时间膀胱截石位对患者下肢肌肉及神经的影响),术中患者头低15°~30°,根据手术范围及患者体型可做一定调整。常规在患者肩部放置肩托,背部使用防滑垫,以防止患者因体位而下滑。
3.2.3 放置举宫器
目前提倡宫颈癌微创手术不使用举宫器械,但在没有明确指南或权威期刊证据提示不可使用举宫器械时,依然可使用举宫器(考虑举宫杯局部压力较大,一般不使用举宫杯),也可采用子宫悬吊法或者宫颈封闭法[16]。
3.2.4 安装单孔Port
脐孔处做一个3~3.5 cm大小横切口或纵切口(如图3),置入单孔Port。横切口或纵切口的选择主要依据患者脐孔的形状,利于术后获得最佳的美观效果。若清扫高位腹主动脉旁淋巴结,也可在脐孔上方4 cm处做一竖形切口,便于手术的完成。需选择适合单孔机器人的单孔Port,单孔Port上至少有4个独立通道、1个进气孔和1个排气孔,镜头臂及1号、2号机器人臂占有3个通道,另一个通道充当辅助孔供助手使用,吸引器、持针器、分离钳等手术辅助器械由此进出。建立人工气腹后,置入Trocar(如图4)。按照术前Trocar设计的布局置入。
3.2.5 镜头臂及机械臂摆放
建立人工气腹后,维持压力在12~15 mmHg,进气量7~10 L/min,将机器人床旁系统推近手术床及患者并与单孔平台相连接。机器人床旁系统一般放置在患者两腿之间,单孔机器人术中一般使用镜头臂、1号及2号机械臂,另外一个通道供助手进出辅助器械。机器人的镜头臂放正中,2号及3号臂分置两侧,镜头臂正对脐孔位置,将机器人的机械臂与穿刺器连接,机械臂展开,整体呈“扇形”打开(如图5)。
3.2.6 置入内窥镜和操作器械
置入内窥镜和操作器械,准备手术。单孔机器人手术一般选用30°镜朝上,根据个人操作习惯和不同器械的特点,选用单极弯剪、有孔双极镊、超声刀等手术器械进行手术的电凝切割。
3.2.7 助手孔器械放置
床旁助手可通过助手孔放置相应器械进行牵拉、钳夹、暴露、吸引或根据术者指令更换机器人手术器械等。
4 手术步骤
手术步骤主要分为两部分:淋巴清扫和广泛子宫切除。按照肿瘤手术无瘤原则,可先行盆腔淋巴清扫,必要时行腹主动脉旁淋巴清扫,再行广泛全子宫切除术±双附件切除。施行手术步骤前,使用双极电凝钳凝闭双侧输卵管峡部。
4.1 探查盆腹腔
了解子宫、附件及其病变,明确有无粘连及其与周围脏器的关系。有异常时,还应探查横膈、肝、脾、胃、肠、大网膜等。探查完毕,充分暴露术野。如有粘连应先行锐性或钝性分离。对于术中使用前哨淋巴结显影的患者,可在宫颈3点及9点注射吲哚菁绿,镜头调节为荧光显影模式,前哨淋巴结显影为绿色,术中行前哨淋巴结切除并送快速病检明确有无转移(如图6)。
4.2 附件的处理
根据患者年龄、卵巢正常与否决定卵巢的去留。①不保留卵巢:有孔双极镊将阔韧带前叶提起,避开血管,由外向内子宫角方向用单极弯剪或电钩切开阔韧带前叶,避开血管切开阔韧带后叶,向内下方游离输尿管,裸化骨盆漏斗韧带(如图7),有孔双极镊电凝,切断骨盆漏斗韧带。②保留卵巢:有孔双极镊电凝卵巢固有韧带及输卵管系膜,单极弯剪切断;将卵巢和悬韧带向患者头侧游离,考虑术后存在补充放疗时,可将卵巢高位悬吊缝合于髂窝(如图8)。
4.3 盆腔淋巴清扫术
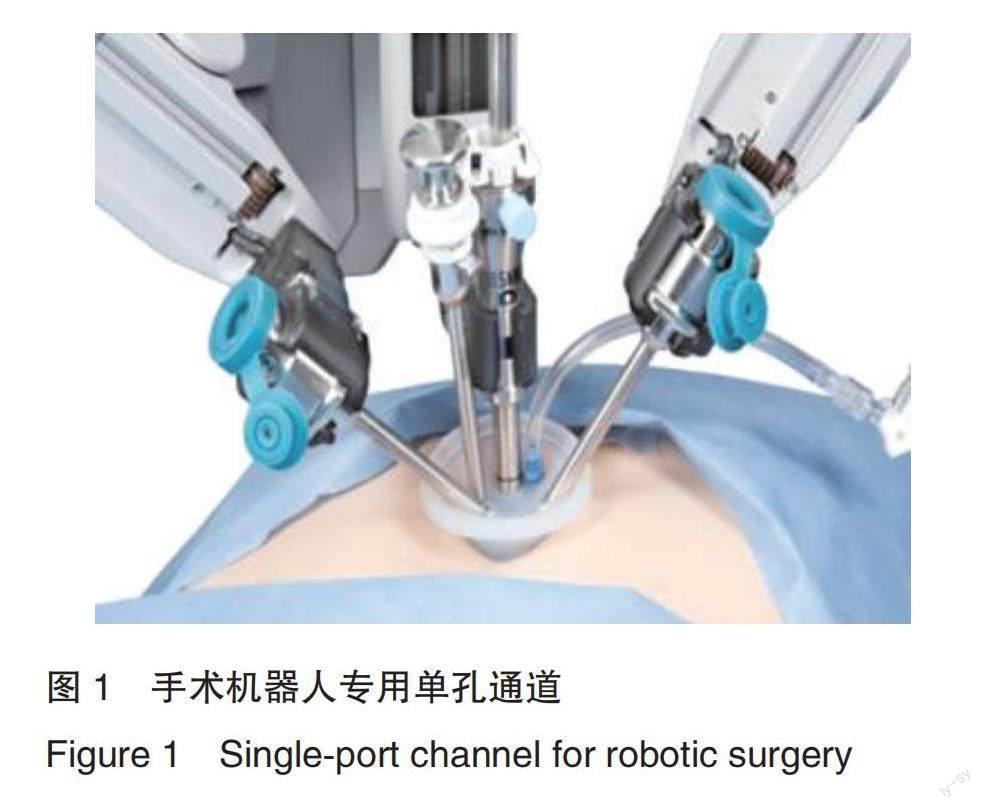
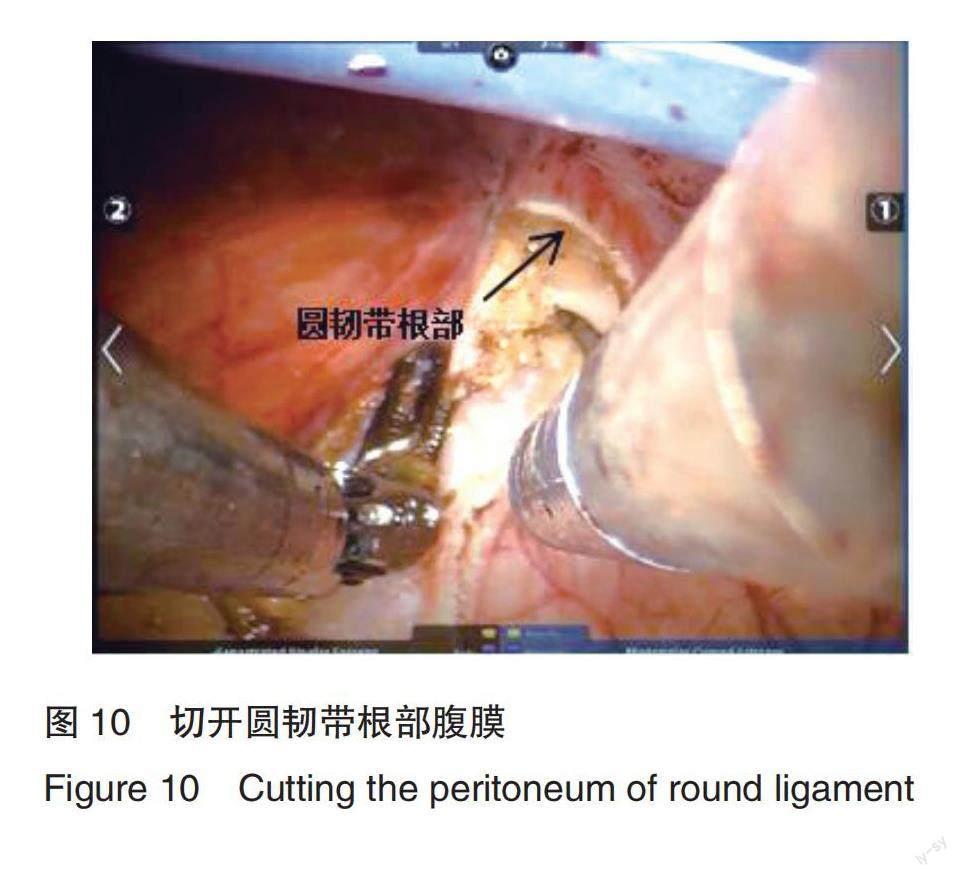
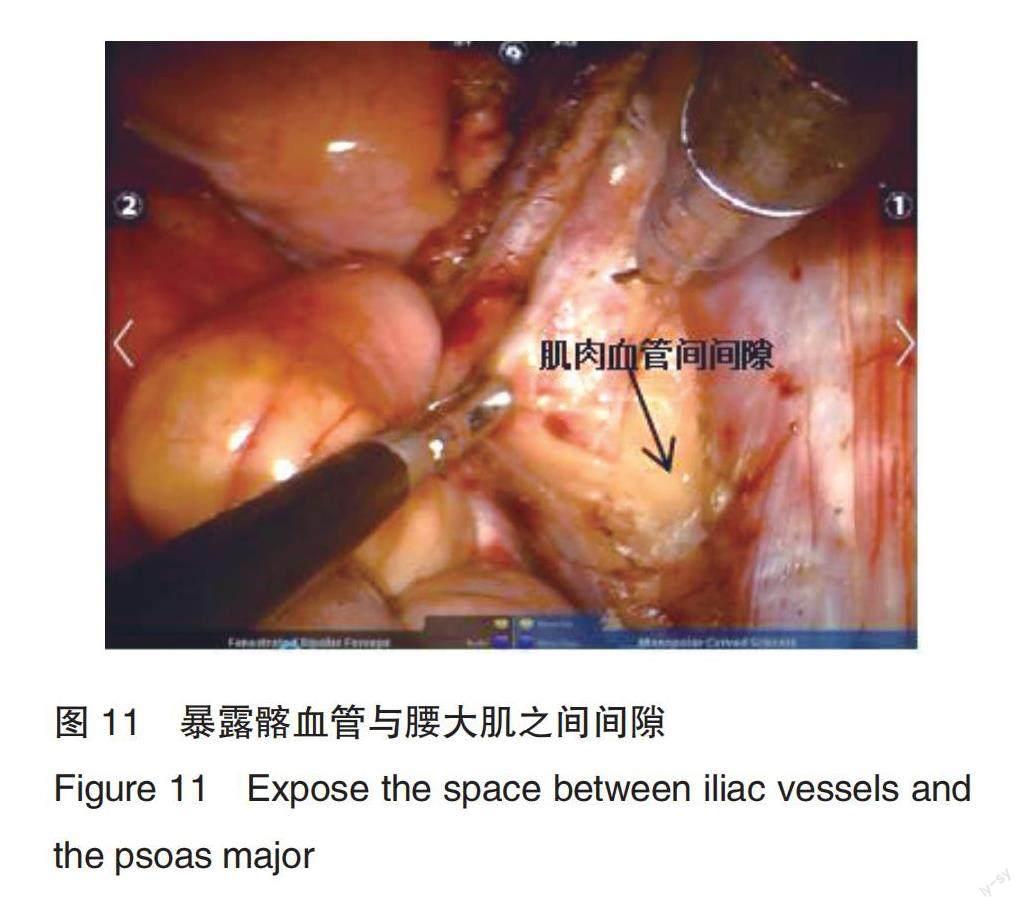
在输尿管跨越髂血管上方2 cm处单极弯剪或电钩打开腹膜(如图9),下方达圆韧带入腹膜外处(如图10),电凝切断圆韧带;有孔双极镊提拉髂总血管表面淋巴结脂肪组织,单极弯剪锐性加钝性分离淋巴结与髂总血管之间间隙,切除髂总动脉前及其周围的淋巴脂肪组织,有孔双极镊继续提拉腰大肌表面淋巴结脂肪组织,单极弯剪锐性加钝性分离并切除,注意显露其上的生殖股神经,并予以保护,避免损伤。单极弯剪或电钩继续切开髂外血管表面鞘膜,裸化髂外动脉及髂外静脉,有孔双极镊提拉、分离并切除其表面髂外及周围淋巴结脂肪组织。助手置入分离钳提拉髂外动脉,暴露髂血管外侧与腰大肌及骨盆壁之间间隙(如图11),将淋巴结脂肪组织从腰大肌内侧及骨盆壁完整剥离。于髂血管的前方最下端外侧分离腹股沟深淋巴结,远端达旋髂静脉处(如图12),单极弯剪完整切除腹股沟深淋巴结(如图13)。髂血管的前方最下端内侧分离出腹壁下静脉及副闭孔静脉,在髂血管末端自下而上继续游离并切除髂血管内侧淋巴结,直至髂血管分叉处,注意游离并避开输尿管,暴露髂内动静脉(如图14),自上而下沿髂内血管分离淋巴结及脂肪组织与血管之间间隙。在髂内血管及髂外血管之间,予单极弯剪逐层切开淋巴结,打开闭孔窝(如图15),暴露闭孔神经,有孔双极镊分离闭孔神经与周围淋巴组织的间隙及闭孔神经下方的闭孔动静脉(如图16),注意术中此处经常发生血管损伤,引发出血;游离闭孔神经与周围淋巴脂肪组织,将淋巴结脂肪组织切除;自下向上游离,在输尿管跨髂血管处输尿管下方与髂总淋巴结融合,完整切除盆腔淋巴结(如图17),把切除的盆腔淋巴结放入标本袋中。
4.4 分离宫颈癌手术中的重要间隙
4.4.1 分离膀胱宫颈及阴道间隙
由子宫侧圆韧带断端处,在阔韧带两叶之间,沿着子宫边缘,剪开阔韧带前叶及膀胱腹膜反折,直达對侧圆韧带断端下方;有孔双极镊提起膀胱腹膜反折边缘,沿膀胱筋膜与子宫颈筋膜间的疏松组织向下及两侧钝行剥离充分推开膀胱,下方紧贴阴道壁予单极弯剪分离膀胱阴道间隙,游离阴道壁3~4 cm(如图18)。
4.4.2 分离膀胱及直肠侧间隙
在游离的髂内动脉末端找到脐动脉及子宫动脉的起始部,分离筋膜及脂肪组织,暴露膀胱侧间隙;在脐动脉与子宫动脉近头侧部分分离筋膜及脂肪组织,暴露直肠侧间隙(如图19),分离间隙的同时裸化子宫动脉(如图20),暴露子宫深静脉,在动脉及深静脉起始部切断(如图21)。
4.4.3 分离宫颈及阴道与直肠之间的间隙
打开腹膜切开直肠与阴道壁之间筋膜组织,紧贴宫颈后方及阴道壁后方将筋膜组织向直肠方向分离,完整裸化并暴露子宫颈及阴道壁后方,进而暴露阴道直肠间隙,下推直肠3 cm(如图22)。
4.5 分离切开膀胱宫颈韧带并游离输尿管
助手提起子宫动脉断端,暴露子宫动脉下方的输尿管,沿血管与输尿管之间的间隙锐性加钝性分离直至输尿管进入膀胱宫颈韧带处,有孔双极镊经膀胱宫颈韧带入口处伸入膀胱宫颈韧带前叶与输尿管之间,钝性分离膀胱宫颈韧带与输尿管之间间隙,并暴露膀胱宫颈韧带出口处,有孔双极镊张开并撑起出口处筋膜组织,单极弯剪予以切开,此时可将膀胱宫颈韧带入口与出口完全贯穿(如图23)。有孔双极镊再次伸入膀胱宫颈韧带前叶并电凝,然后用单极弯剪小心切开膀胱宫颈韧带前叶(如图24)。助手用输尿管抓钳向外上方牵拉输尿管,暴露输尿管与膀胱宫颈韧带后叶间隙,锐性加钝性分离间隙,下推输尿管直至膀胱角处,完全游离输尿管子宫颈段(如图25)。
4.6 切断骶韧带及主韧带
切开骶韧带表面腹膜,游离腹膜与骶韧带之间间隙(如图26),间隙打开后距紧贴骶骨表面切除骶韧带(如图27);继续分离主韧带与周围组织间隙,裸化并暴露主韧带(如图28),距子宫旁3 cm处凝切主韧带(如图29)。
4.7 切除子宫
在宫颈下方距宫颈病灶最外缘2 cm处以可吸收线贯穿阴道前后壁,缝合后打结扎紧(如图30),避免切开时盆腔内暴露宫颈;在缝线下方环状切断阴道(如图31~32),子宫随之切除,自阴道取出。
4.8 缝合阴道断端
可予无盐水冲洗腹盆腔,在水中检查有无活动出血,吸净积液,再予生理盐水冲洗盆腹腔,并反复检查手术野有无活动性出血。可吸收线连续缝合阴道残端,由于宫颈癌手术阴道壁切除较多,在单孔机器人下有时缝合困难,可经阴道缝合,以降低缝合难度,但缝合完毕后需用机器人视野检查是否缝合到膀胱。单孔机器人因为只有脐部一个切口,放置引流困难,可经阴道残端放置一个“T管”或尿管充当引流。
4.9 术后处理及注意事项
4.9.1 保持引流管通畅
该手术含有淋巴结切除,术后渗出液比较多,因此务必保持引流管的通畅,术后注意每日观察引流液的量和颜色。一般引流量在100 ml以内可以拔除引流管,术后注意低蛋白饮食,减少淋巴排液。
4.9.2 注意监测生命体征
特别是老年患者,术后补液量和速度都应控制在合理的范围内,注意心肺功能的监测。
4.9.3 抗生素预防性应用
常规应用预防性抗生素至术后24~48 h。观察体温和血象变化。
4.9.4 饮食
术后排气后可以进食流质,以促进肠蠕动的恢复。其后根据排气排便情况循序渐进地进行饮食调整。
4.9.5 预防止下肢血栓形成
鼓励患者早期下床活动,进行双下肢气压治疗。进行术后血栓风险评分,高危评分者给予药物预防治疗。
5 手术并发症的处理及预防
目前机器人宫颈癌手术主要术中并发症为肠道损伤(0.50%~0.76%)[17],膀胱和输尿管损伤(0.4%~2.5%)[18],血管损伤(0.59%~1.73%),神经损伤(0.14%~1.93%)[19]。经本中心研究发现,单孔机器人术中并发症的发生率并未高于多孔机器人,术中谨慎操作,发现损伤及时处理,患者术后往往预后良好。对于术中未及时发现的并发症,术后通过患者主诉、体征、实验室及辅助检查及时发现后,应积极与患者及家属进行坦诚的沟通并及时处理[20]。
5.1 肠道损伤
肠道损伤分为热损伤和割裂伤。对于热损伤,若仅仅损伤肠脂垂或肠系膜,无明显出血,一般无需特殊处理;若肠表面有明显热损伤痕迹(肠管表面发白),可予2-0或3-0肠线在热损伤部位做一8字缝合。对于割裂伤,在切口部位予2-0或3-0肠线进行间断缝合;若损伤切口较长,可请普外科医生术中协助缝合,缝合结束后可将缝合部位放置于生理盐水中,检查缝合部位的气密性。术后患者需通气后进食。
5.2 膀胱损伤
术中膀胱损伤多发生于多次剖宫产术后或盆腔粘连严重的患者中,术中下推膀胱时未找到明显界限及间隙,下推膀胱时未紧贴宫颈及阴道壁,进而导致膀胱损伤。膀胱损伤术中需及时发现,比较明显的迹象为尿袋如气球般膨胀,此时需及时寻找膀胱受损部位。若未寻找到明显破损部位,可经膀胱美蓝试验协助寻找膀胱破损部位,找到破损部位后予3-0肠线进行间断缝合创面。若损伤部位膀胱组织较薄,在第一层缝合完毕后,可继续进行包埋加固缝合创面,避免术后膀胱漏。术后一般留置尿管不少于1周。
5.3 尿管损伤
术中尿管损伤同样可分为热损伤和断裂伤,热损伤一般术中难以发现,往往术后由于阴道残端漏尿或术后B超提示输尿管及肾盂扩张得以发现。在手术中,若手术范围大,输尿管裸化较为充分,膀胱角未充分分离,膀胱阴道间隙分离不满意,术中可留置双J管,对于术后发现的热损伤,术后放置双J管往往能够治疗热损伤,对于发生在膀胱角部位的输尿管热损伤,放置双J管有时仍然不能解决问题,需要行输尿管再植。输尿管术中断裂伤往往由于术中粘连严重及操作不仔細引起,但术中一般容易发现,发现后可请泌尿外科医生行输尿管损伤的修复和吻合,术后可放置双J管,患者一般预后较好。
5.4 血管损伤
微创手术中容易损伤的血管一般为髂外静脉、髂总静脉以及腔静脉。对于盆腔部位大静脉的损伤,一般在微创下缝合较为容易,常用5-0 Prolene线进行缝合,缝合时注意尽量避免牵拉和撕扯以免扩大破损部位。对于缝合后仍有出血的血管,必要时可予血管夹钳夹部分血管壁进行止血。发生腔静脉损伤时,往往出血量较大,需要助手密切配合,吸引器充分吸取出血,暴露损伤部位,便于术者缝合。对于缝合困难的患者,单孔手术的一个优势是可以借用脐部单孔在直视下对损伤部位进行缝合。若出血量较大,考虑妇产科医生止血困难,术中应及时请血管外科医生协助修补损伤的血管。
5.5 神经损伤
宫颈癌手术中最容易发生损伤的神经为闭孔神经,损伤部位往往为神经的两端。术中需及时发现可能出现的神经损伤,若出现神经损伤,可充分游离神经损伤的断端,借助机器人镜头对损伤的神经进行缝合,一般可予7-0 Prolene线进行神经缝合。术后给予患者营养神经的药物,患者往往预后良好。若术中缝合神经困难或不满意,可请骨创伤科医生对神经进行缝合修补。
6 术后处理
术后预防性应用抗生素,注意观察患者生命体征变化、引流液量及性状、尿量、尿液颜色、注意出入量的平衡、伤口恢复情况等。术后第1 d或第2 d复查血常规、肝肾功能、凝血功能,排气后可逐步恢复饮食,并给予适当营养支持,注意纠正低蛋白血症;高龄患者术后积极翻身拍背,嘱患咳嗽、咳痰,并予雾化及化痰治疗;嘱患者早期下床活动,预防深静脉血栓,术后24~48 h常规使用低分子肝素抗凝治疗;宫颈癌术后一般留置尿管2周,拔尿管前可适当锻炼患者膀胱功能,拔尿管前常规检测患者残余尿,<100 ml可予以拔除,>100 ml则继续留置尿管。对于合适的患者,可应用 ERAS 方案加快术后康复。
7 随访
单孔机器人手术治疗子宫颈癌的术后随访同其他手术方式。
8 单孔机器人宫颈癌手术展望
综上所述,单孔机器人宫颈癌手术虽然有一定操作难度,但其难度明显小于单孔腹腔镜,其腕式、多维度运动的存在能够降低手术难度。关键术者在术中操作时需动作轻柔,多利用手腕的运动,减少大幅度地调节机械臂,加强和助手的沟通和交流,使其更好地参与手术,达到精准化及微创化治疗妇科疾病的目的,易于为医生及患者接受,便于推广应用,但其远期疗效仍需进一步观察。目前随着达芬奇Xi和SP机器人系统的引进,单孔机器人手术难度会进一步降低,国内也有多家机器人公司研发了自己的单孔机器人手术系统,相信在不远的将来,单孔机器人手术会被更多地应用于宫颈癌的手术治疗中。
《单孔机器人手术治疗早期宫颈恶性肿瘤中国专家共识(2023版):附视频》专家组
执笔专家:
高京海(海军军医大学第二附属医院)
孟元光(中国人民解放军总医院)
陈必良(西安市人民医院)
刘晓军(海军军医大学第二附属医院)
讨论专家:(按姓氏音序排列)
蔡丽萍(南昌大学第一附属医院)
陈必良(西安市人民医院)
范江涛(广西医科大学第一附属医院)
高京海(海军军医大学第二附属医院)
华克勤(复旦大学附属妇产科医院)
纪 妹(郑州大学第一附属医院)
刘晓军(海军军医大学第二附属医院)
孟元光(中国人民解放军总医院)
孙 静(同济大学附属第一妇婴保健院)
王海琳(西安国际医学中心)
王 育(同济大学附属第一妇婴保健院)
张 蔚(武汉大学中南医院)
参考文献
[1] Lee P S, Bland A, Valea F A, et al. Robotic-assisted laparoscopic gynecologic procedures in a fellowship training program[J]. J Soc Laparoendosc Surg, 2009, 13(4): 467-472.
[2] 金振宇.中國达芬奇手术机器人临床应用[J].中国医疗器械杂志, 2014, 38(1): 47-49.
[3] Cho J E, Nezhat F R. Robotics and gynecologic oncology: review of the literature[J]. J Minim Invasive Gynecol, 2009, 16(6): 669-681.
[4] Sert B M, Abeler V M. Robotic-assisted laparoscopic radical hysterectomy (Piver type III) with pelvic node dissection—case report[J]. Eur J Gynaecol Oncol, 2006, 27(5): 531-533.
[5] Fader A N, Escobar P F. Laparoendoscopic single-site surgery (LESS) in gynecologic oncology: technique and initial report[J]. Gynecol Oncol, 2009, 114 (2): 157-161.
[6] Fagotti A, Corrado G, Fanfani F, et al. Robotic single-site hysterectomy (RSS-H) vs. laparoendoscopic single-site hysterectomy (LESS-H) in early endometrial cancer: a double-institution case-control study[J]. Gynecol Oncol, 2013, 130(1): 219-223.
[7] Sinno A K, Tanner E J. Robotic laparoendoscopic single site radical hysterectomy with sentinel lymph node mapping and pelvic lymphadenectomy for cervical cancer[J]. Gynecol Oncol, 2015, 139(2): 387.
[8] Vizza E, Chiofalo B, Cutillo G, et al. Robotic single site radical hysterectomy plus pelvic lymphadenectomy in gynecological cancers[J]. J Gynecol Oncol, 2018, 29(1): e2.
[9] 顾圆圆, 周冠楠, 丁景新, 等.机器人单孔腹腔镜在妇科手术中应用进展[J].中国临床医学, 2020, 27(1): 136-139.
[10] 高京海, 金志军, 李俊平, 等.机器人辅助经脐单孔腹腔镜治疗子宫颈浸润癌12例临床分析[J].实用妇产科杂志, 2019, 35(10): 797-800.
[11] 刘艳燕, 易跃雄, 张蔚, 等.第四代达芬奇机器人Xi系统辅助单孔和多孔腹腔镜治疗妇科良性疾病围手术期效果分析[J].中国实用妇科与产科杂志, 2021, 37(6): 679-682.
[12] 纪妹, 刘亚芬.机器人辅助腹腔镜在妇科经自然腔道内镜手术中的应用[J].中国实用妇科与产科杂志, 2019, 35(12): 1321-1324.
[13] Noble S, Pasi J. Epidemiology and pathophysiology of cancer-associated thrombosis[J]. Br J Cancer, 2010, 102 (Suppl 1): S2-9.
[14] Einstein M H, Pritts E A, Hartenbach E M. Venous thromboembolism prevention in gynecologic cancer surgery: a systematic review[J]. Gynecol Oncol, 2007, 105(3): 813-819.
[15] 王佳晰, 于浩, 张师前.妇科肿瘤患者围手术期静脉血栓栓塞证预防的专家共识(2022年版)[J].中华肿瘤防治杂志, 2022, 29(10): 687-694.
[16] 郭琳, 赵宏喜, 李艳红, 等.宫底悬吊免举宫技术辅助应用于早期宫颈癌达芬奇机器人系统手术效果[J].中国计划生育学杂志, 2021, 29(12): 2696-2699.
[17] Picerno T, Sloan N L, Escobar P, et al. Bowel injury in robotic gynecologic surgery: risk factors and management options. A systematic review[J]. Am J Obstet Gynecol, 2017, 216(1): 10-26.
[18] Lee Z, Kaplan J, Giusto L, et al. Prevention of iatrogenic ureteral injuries during robotic gynecologic surgery: a review[J]. Am J Obstet Gynecol, 2016, 214(5): 566-571.
[19] LI Y L, KONG Q D, WEI H Y, et al. Comparison of the complications between minimally invasive surgery and open surgical treatments for early-stage cervical cancer: a systematic review and meta-analysis[J]. PLoS One, 2021, 16(7): e0253143.
[20] 高京海, 张育佼, 金志军, 等.机器人辅助单孔腹腔镜实施妇科恶性肿瘤手术技巧的探讨[J].解放军医学杂志, 2019, 44(7): 615-619.