新能源汽车高压部件CAN总线故障诊断分析
2023-08-27 15:36贾延林林浩杰许俊杰
汽车电器 2023年8期
贾延林 林浩杰 许俊杰


【摘 要】新能源汽车的高压部件是新能源汽车区别传统汽车的主要部件,在新能源汽车运行过程中起着重要作用,而高压部件之间的通信是基于CAN总线系统。以吉利EV450为例,分析新能源高压部件之间CAN总线的故障,为新能源汽车的维修提供一定的参考。
【关键词】新能源汽车;CAN总线;故障分析
中图分类号:U469.72 文献标志码:B 文章编号:1003-8639( 2023 )08-0014-03
Analysis of CAN Bus Fault Diagnosis for High Voltage Components of New Energy Vehicles
JIA Yan-lin,LIN Hao-jie,XU Jun-jie
(Department of Vehicle Engineering,Jinzhong Polytechnic College,Jinzhong 030600,China)
【Abstract】High voltage components of new energy vehicles are the main components of new energy vehicles which are different from traditional vehicles. They play an important role in the operation of new energy vehicles. The communication between high voltage components is also based on CAN bus system. Taking Geely EV450 as an example,this paper analyzes the breakdown of CAN bus between new energy high-voltage components,and provides some reference for the maintenance of new energy vehicles.
【Key words】new energy vehicles;CAN Bus;failure analysis
随着环境污染和能源危机问题的日益突出,新能源汽车已成为当今汽车工业发展的重要方向。在政策的引导下,中国新能源汽车的保有量也达到了新的高度,学习对新能源汽车的维修也迫在眉睫。新能源汽车与传统汽车相比有了较大的变化,特别是高压部件的加入,主要有动力电池、车载充电机、直流转换器、驱动电机等,这些部件是传统车上所没有的,而它们之间的信息通信依然使用的是CAN总线系统,即所谓的新能源CAN。文中以吉利EV450为例,分析新能源汽车高压部件之间的CAN总线故障问题。
1 CAN总线线路
CAN(Controller Area Network,控制器局域网络),由于其高性能、高可靠性及独特的设计,越来越受到人们的重视[1]。CAN总线是车内电子装置中的一个独立系统,就本质而言,CAN总线就是数据传输线路,用于在控制单元之间进行信息交换[2]。
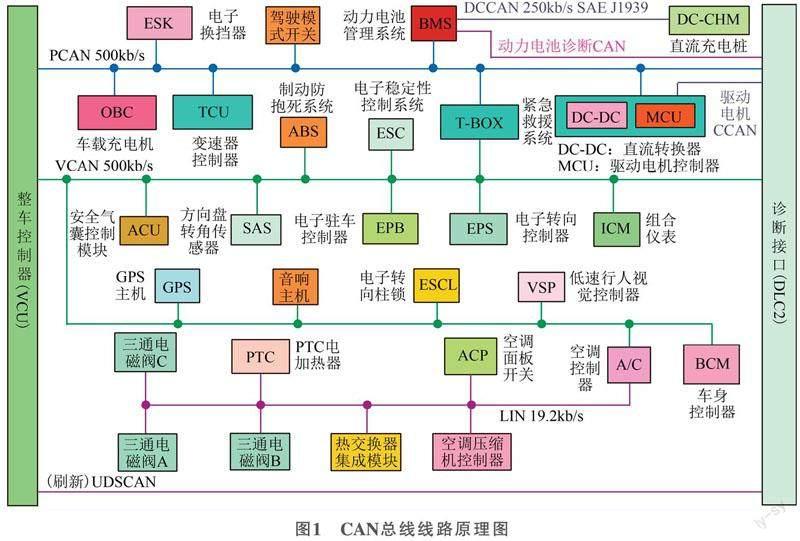
图1展示了吉利EV450的CAN总线线路原理图,从图中可以看出吉利EV450有P-CAN和V-CAN两套CAN总线系统,而两者之间通过整车控制器VCU进行数据转换并相互通信。其传输速率达500kbit/s,属高速CAN。P-CAN局域网中包含有:动力电池管理系统BMS、车载充电机OBC、直流转换器DCDC、驱动电机控制器MCU等模块。通过测量发现P-CAN局域网中的终端电阻在动力电池管理系统BMS和驱动电机控制器MCU中。如果P-CAN总线或控制单元出现故障,将导致VCU无法接收和发送数据信息,致使整车高压控制、车辆驱动控制不受管控,各控制单元之间无法获知当前车辆状态信息,进而关闭内部的执行功能,造成整车高压上电失败、车辆无法运行等故障。
2 CAN总线机理
CAN总线上的每个节点(控制单元)能独立完成网络数据的交换和测控任务。如图2所示,每个节点中包括有收发器、控制器和MCU。其中收发器直接和总线相连,具备发送和接收信息的功能,主要进行物理电平和逻辑电平的转换。发送时,将上层传递下来的二进制数据流转换成电压信号传输到总线上;接收时,将总线电压信号转变成二进制数据流传到上层。
CAN总线的数据传输实质是通过总线上的电平变化传输的。高速CAN总线中,差分信号高电平用CAN-High表示,电压3.5V;低电平信号用CAN-Low表示,电压为1.5V;差分电压为2V,此时,总线为显性位。差分信号的高电平信号和低电平信号均为2.5V时,差分电压為0V,总线为隐性位。图3为CAN收发器转换信号示意图。
在CAN网络系统中,CAN控制单元中的芯片、电阻、二极管等电子元器件以及CAN总线线路,任何地方出现故障都将导致CAN总线上的电平变化,显性电平和隐性电平都会发生变化,最终导致总线上的信息无法传输。而总线电平的变化与CAN收发器内部电路有着重要的关联,图4展示了CAN收发器内部的示意电路图。
3 故障分析
CAN总线系统具有自诊断功能,用诊断仪可以读出与CAN总线相关的故障,对于高速CAN故障,往往会记录通信失败或失效等故障信息。根据故障记录,可快速、准确地排除故障。CAN总线正常工作的前提条件是车辆在任何工况均不应有CAN总线故障记录[3],所以每次确认故障排查完后,必须重新启动车辆,更新故障显示的内容。
CAN总线常见的故障主要有CAN-H和CAN-L的线路断路、短路、虚接等故障。CAN总线出现故障时,需要用示波器测量CAN-H和CAN-L的信号波形,通过波形的变化分析故障所在部位及故障原因。
文中通过教学设故平台,分别对BMS模块的CAN-H和CAN-L两根线路进行断路、短路、虚接、互短、对搭铁短路等多种故障设置,从图5中可看出,BMS模块中PCAN的CAN-H、CAN-L对应的针脚分别是3和4。用示波器同时测量BMS的3、4号针脚的信号波形图,进而分析CAN总线故障机理。图6为正常状态BMS中P-CAN总线的信号波形图。
3.1 断路故障
CAN-H断路时,从图7中可以看出,CAN-H和CAN-L的隐性信号电压仍然是2.5V,CAN-H的显性电压有所增大,CAN-L的显性电压有所降低。这是因为在隐形状态时,并未影响CAN 收发器中原有电路的电压分压大小,两端的输出电压一样。图8中,CAN-L断路时,CAN-H和CAN-L信号波形变化幅度较大,这是因为有反射波的影响,造成电压放大失真。
3.2 短路故障
CAN-H对搭铁短路时,故障波形如图9所示。CAN-H导线的电压为0V,CAN-L导线的电压略大于0V,这是因为有终端电阻的存在,将CAN-L的电压有所拉高。CAN-L对搭铁短路时,故障波形如图10所示。CAN-L导线的电压为0V,CAN-H导线的隐形电压略大于0V,而显性电压大于3.5V,这也是由于终端电阻的存在造成的电压分布不同。分析此类波形时,主要看总线波形图中,是否有一根信号线的隐形和显性电平都接近0V,只有当CAN-H对搭铁短路时,其信号电平才接近0V,否则就是CAN-L对搭铁短路。
当CAN-H和CAN-L互短时的波形如图11所示,CAN-H和CAN-L的信号电压不管隐形电平还是显性电平,都接近2.5V。
除上述短路故障外,还有CAN-H和CAN-L对电源正极短路的故障,其波形分析较为简单,哪条线与电源短路,哪条线的电压就会被拉高到电源电压近12V,而另外一条线的电压则低于电源电压,这是由于模块中有终端电阻的存在进行了分压。
3.3 虚接
CAN-H线虚接后,如图12所示,由于有电阻的加入,使得线路中的电流减小,CAN收发器元电路中的分压减小,虚接电阻前端测试出的信号电压增大。此时,CAN-L的信号波形随着CAN-H波形的变化趋势而发展。CAN-L虚接后,如图13所示,CAN-H信号显性电压有所提高,CAN-L显性电压向反方向变化,有较为明显的变化。虚接故障的设置是在电路中串接了一个1kΩ的电阻。接入的电阻值越大,显示的电压值变化越大。分析此类波形时,要注意看信号电压是否有向反向电平变化的趋势,如有,则线路中存在虚接。
4 总结
通过对吉利EV450网络总线的了解,对P-CAN总线中的BMS模块进行了多种线路故障设置,并从信号波形图中分析故障原因,总结变化规律,为新能源汽车的维修提供一定的参考。
针对上面所列的各种线路故障,在排查的过程中,可以将CAN总线中的节点依次拔除,同时注意观察示波器中的波形变化。当故障线组被拔下后,信号波形恢复到了正常波形。
參考文献:
[1] 曹剑馨,付安英,张金博,等. 基于BP神经网络的CAN总线网络通信性能评估[J]. 信息技术与信息化,2021(8):166-168.
[2] 刘春晖,刘光晓. 汽车车载网络技术详解(第三版)[M]. 北京:机械工业出版社,2019.
[3] 弋国鹏,魏建国. 电动汽车控制系统及检修[M]. 北京:机械工业出版社,2022.
(编辑 杨 景)
作者简介
贾延林(1984—),女,硕士,讲师,研究方向为职业教育(汽车方向)。
猜你喜欢
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
科学与财富(2016年15期)2016-11-24
大经贸(2016年9期)2016-11-16
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年18期)2016-11-03
经营者(2016年12期)2016-10-21
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29