
考虑负荷特性的电力系统低频减载系统设计
2023-08-19 09:59高虹霞吴佳芳
电子设计工程 2023年16期
高虹霞,高 剑,宋 烨,朱 童,吴佳芳
(1.四川省电力公司资阳供电公司,四川 资阳 641300;2.国网四川省电力公司,四川 成都 610041)
一旦电力系统存在较大的故障因素,内部的功率缺额也会随之变大,很难寻找有效的调频控制方法。为了更好地满足系统负荷需求,使系统能够达到功率平衡,需要技术层面将系统的部分负荷去除,从而保证系统的功率能够达到平衡状态,防止系统的频率发生崩溃,进而确保电力系统能够以稳定的状态运行[1-2]。目前,有大量学者对低频减载系统进行了研究,吴云亮等[3]提出了基于减载贡献因子的低频减载动态优化方法,分析减载贡献因子对不贡献功率造成的影响,从而计算功率精度,通过动态方式实现逐次递减优化,从而减少负荷切除量,使电力系统能够具备频率调节的能力。钱敏慧等[3]提出了基于自适应惯性权重混沌粒子群算法的多机系统低频减载整定算法,确定电力系统频率降低阈值,通过多轮减载的方式保证系统能够稳定地运行。目前的方法都很难在实际运行时,既保证系统频率得到快速恢复,又能够减少负荷切除量。
综上所述,该文在分析负荷特性的基础上,设计了一种新的电力系统低频减载系统,首先确定负荷状态,然后从硬件和软件两方面进行优化设计,实现低频减载。
1 硬件设计
该文设计的电力系统低频减载系统硬件主要采用模块化的思想[4],通过多模块设计实现低频减载设计。系统硬件结构如图1 所示。

图1 硬件结构示意图
在电力系统低频减载系统中,CPU 模块占据着主导作用,其是系统的核心模块,当采集模块得到母线电压信号和频率信号后,会传递给CPU 模块,由CPU 模块完成处理,将电源模块安装在电源插件上,并将模拟量输出在装置面板上,从而更好地传递信息[5-6]。
1.1 双处理模块设计
传统低频减载系统采用的DSP 处理器是一般的DSP 处理器,处理能力和通信能力都难以满足用户要求,因此该文使用双CPU 结构,即DSP+单片机的模式设置硬件,通过DSP 实现数据采集工作和处理工作,利用单片机完成信息控制和通信,确保设计的系统硬件功能。虽然双CPU 结构能够提高系统的功能,但是也加大了硬件的复杂度,降低可靠性,因此文中通过精简指令集计算机来弥补这一缺陷,借助精简指令集计算机极高的运算能力提高系统硬件的集成精度,满足低频减载需求[7]。
该文选用的处理器为ColdFire 微控制器,微控制器为四核控制器,能够在不同的场合中发挥不同的作用,如果使用环境为32 位入门级环境,则使用V1 内核;如果使用环境为工业环境和家庭环境,则使用V2 内核;如果使用环境为工业测控环境,则需要使用V3;如果使用环境为多媒体环境,则使用V4内核[8]。微处理器选择的是MCF52235 微处理器,该微处理器为系统的核心装置,内部为V2 内核,存储器内部的FLASH 内存为128 kB,SRAM 内存为32 kB,系统时钟频率为60 MHz,采用的封装为80LQFP 封装[9-10]。ColdFire 微控制器与MCF52235 微处理器形成的双CPU 结构如图2 所示。

图2 双CPU结构
该文研究的双CPU 结构内部的控制器为嵌入式微控制器,能够同时满足以太网控制器的要求,并将物理层的内核整合到一起,确保系统内部的性能[11]。微控制器内部设置的乘法器为增强型乘法器,EMAC 和CAU 彼此配合,为DSP 的操作和安全运行提供良好的保障。ColdFire 微控制器与MCF52235微处理器形成的双CPU 结构支持7 级终端管理,系统能够自动完成中断控制,供电电压为3.3V,与软件连接,使内部集成锁形成看门狗。当双CPU 运行频率能够达到60 MHz 后,系统的运行速度可以提高到80 MIPS,不同端口用户可以同时使用系统[12]。
1.2 数据采集模块
数据采集模块主要负责采集电压信号和频率信号,得到的外部信号在经过互感器后会转变成强电信号,而电力系统仅能接收0~3.3V电压,因此必须要将信号转换成弱电信号,使CPU 模块能够更好地完成信息处理[13]。
数据采集模块通过DMA 定时器来实现,该装置具备输入捕捉功能,内部拥有多种寄存器。DMA 定时器结构如图3 所示。
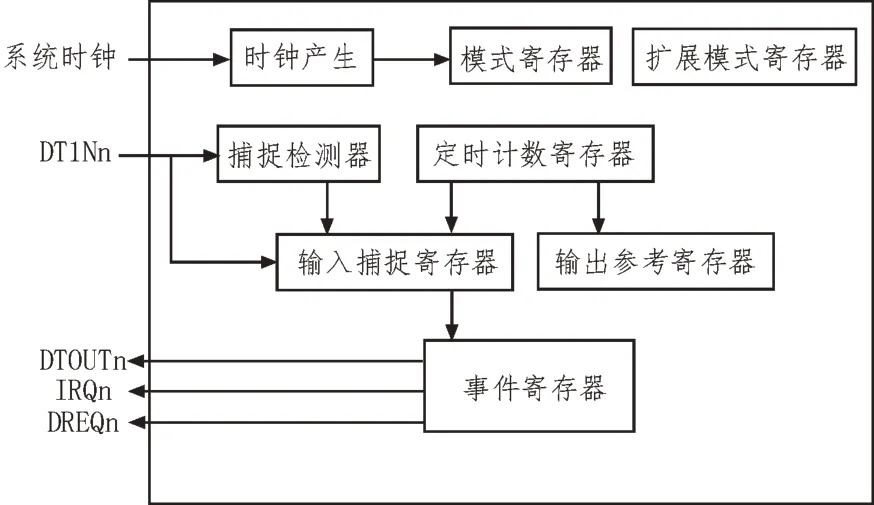
图3 DMA定时器结构
根据图3 可知,如果系统捕捉到信号,定时器内部的DTCRn 会自动锁存,并记录得到的数值,同时DMA 定时器会自动产生中断请求和传输请求。采集模块方波生成电路如图4 所示。
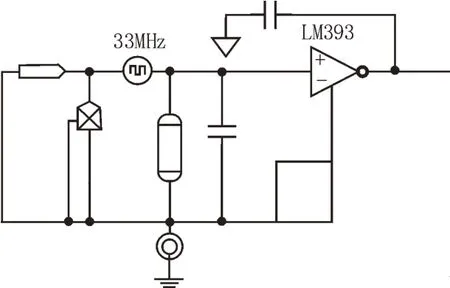
图4 采集模块方波生成电路
根据图4 可知,系统的微信电压互感器会向采集模块传递交流信号,信号进入采集模块后,会经过双向限幅操作和滤波处理,在过零比较器LM393中完成通信输入,如果信号以正弦的模式输出,且输出电压不超过3.3V,则证明得到的信号为有效信号。
1.3 通信模块
该文利用CAN 总线设计低频减载系统通信模块,外部的CAN 控制器和接口芯片能够很好地降低系统在开发过程的难度,通信模块如图5 所示。

图5 通信模块
根据图5 可知,该文使用的通信模块支持集成规则,能够很好地完成CAN2.0 协议,内部的FlexCAN模块可以在外围接口上添加驱动器,通过驱动器使系统的CAN 通信能力更强。通信模块中的收发器由飞利浦公司生产,能够完成差动发送功能和接收功能,从而减少CPU 对外部环境的干扰,通过光电隔离措施使接口电路能够得到更好地隔离,除了光电隔离,还采用了电源隔离能够很好地与FEC 兼容[14]。
2 软件设计
将电力负荷特性分为常规负荷模型和调频中断负荷模型,通过负荷特性分析,实现合理分配。电力系统中包括发电电源、电源母线节点、复合单元和控制单元,将电源模块与电源母线节点连接,母线节点会通过变压器与输电线路的其他节点连接,完成不同单元的控制[15]。
对数据进行匹配,计算控制时间,通过匹配结果实现优化控制,从而确保电网能够在正常的频率下稳定运行。
匹配过程如式(1)所示:
其中,P表示电网在运行过程中的整体负荷;PL表示以常规状态运行的负荷;PF表示运行过程中产生的中断负荷。
确定电力系统负荷的目标函数,如式(2)所示:
其中,ΔP表示电力系统在多种模式下得到的负荷总量;Kr表示可调节中断负荷节点;Pi表示负荷量。
在得到目标函数之后,计算控制代价,计算公式如下所示:
其中,M表示代价模型;B表示在中断负荷补偿差价;S(p,t)表示增长差价;C表示出现不确定问题时产生的补偿系数。
系统软件在工作过程中,具有实时检测能力,能够确定不同节点的频率值[16],并进行实时分析,通过多负荷组合方式,使系统具备最优频率响应性能,从而更好地完成低频减载控制操作。
3 实验研究
为了更好地检测该文设计的考虑负荷特性的电力系统低频减载系统的有效性,设计对比实验,监测对象为辽宁电网,检测共有5 轮,前3 轮为基础检测,后2 轮为特殊检测。在第一轮检测时,动作频率为50.0 Hz,当完成全部检测时,动作频率为48.9 Hz。
在实验之前,同时分析电网内部不同母线节点的输出频率,在确定节点的输出频率后,利用监测模块提取电网内部的频率信息,并将提取的频率信息再次调度,传输给监控中心,利用实时分析判断电力系统内部节点频率,检测阈值为49.5 Hz,如果检测的频率低于这一阈值,则证明电力系统出现了低频问题。一旦证明系统存在电平故障,低频减载系统会自动启动。提取电力区域负荷,按照负荷特征将负荷分为常规负荷和频率中断负荷,分析信息匹配,得到代价模型。
该文设定的初始负荷特性共有四种,负荷量分别为3 000 MW、2 500 MW、3 200 MW、2 900 MW。采用该文设计的电力系统低频减载系统进行优化,并对比传统的基于减载贡献因子的低频减载动态优化方法、基于自适应惯性权重混沌粒子群算法的多机系统低频减载整定算法,实验结果如表1-3 所示。

表1 减载贡献因子切负荷实验结果

表2 自适应惯性权重混沌粒子群算法切负荷实验结果

表3 该文系统切负荷实验结果
根据表1-3 可知,相比于传统的方法,该文设计的系统优化的负荷更少,总体切除的电力负荷更少,少切比例高达8.25%,对于保证系统的灵敏性有很好的意义。原因是该文设计的系统在CPU 上进行了优化,能够更好地得到各种不同的权重系数。虽然传统方法和该文系统都考虑了不同级别的重要负荷,但是该文设计的系统增加了更多符合切除对频率恢复灵敏的考虑,确保在对不同级别负荷进行切除的时候能够得到更好的频率恢复曲线。该文设计的系统既能够确保切除量较少,同时也能够更好地保证频率恢复,该文设计的系统具有很强的实用性。
4 结束语
低频减载在恢复电力系统的灵敏性,确保电力系统正常运行发挥着关键性作用。该文在充分考虑电力系统负荷特性后,设置了低频减载系统,以模块的方式设定硬件,在软件上对各项参数进行优化,建立目标函数,确定代价模型,实验结果表明,设计的系统具有很好的实际应用效果,可以在相关工程中发挥重要作用。
猜你喜欢
天天爱科学(2020年6期)2020-09-10
电子制作(2017年14期)2017-12-18
美术文献(2016年6期)2016-11-10
东北电力技术(2016年2期)2016-05-17
中国化肥信息(2016年35期)2016-05-17
核科学与工程(2015年2期)2015-09-26
全球定位系统(2015年4期)2015-02-28
电测与仪表(2014年14期)2014-04-04
单片机与嵌入式系统应用(2014年8期)2014-03-23
单片机与嵌入式系统应用(2014年9期)2014-03-11
