
无人机OFDM−SWIPT轨迹通信联合优化设计
2023-08-18 06:37王丽平宋宪华
机械设计与制造 2023年8期
王丽平,雷 蕾,宋宪华
(1.郑州铁路职业技术学院,河南郑州 450002;2.西安航空学院,陕西西安 710077)
1 引言
作为新一代信息技术的高度集成和综合应用,物联网(Inter⁃net of Thing,IoT)引起了学术界和工业界的极大兴趣[1]。随着IoT应用领域的扩大,基于无人机的IoT成为一个新兴的研究热点,无人机凭借其空中优势,在环境监测、遥感与地理信息工程、情报收集等领域得到了广泛的应用[2−4]。无人机可作为空中通信平台,按需提供移动服务。此外,由于无人机支持快速部署,它可以提供紧急网络接入,并在偏远地区和灾区快速建立通信连接。
现有的无人机使能IoT 研究主要集中在无人机与用户之间的信息传输。文献[5]在无障碍网络的多跳中继信道模型中,考虑了中断概率、误码率和信道容量。文献[6]采用了一种带定向天线的无人机进行了试验,通过联合优化无人机的高度和天线波束宽度,使吞吐量最大化。文献[7]针对基于无人机的多跳中继网络的实时数据传输问题,提出了一种通过优化信号衰减相关参数来实现吞吐量最大化的方案。然而,由于无人机轨迹优化问题往往是非凸的,直接求解非常困难。为此,基于逐次凸逼近技术,许多文献致力于无人机航迹和资源分配的联合优化,以提高网络性能。文献[8]提出了一种无人机航向和资源分配的联合优化方案,在无人机运动和能量预算约束下,最大限度地降低了数据分离率。文献[9]研究了一种基于无人机的正交频分复用(Orthogonal Frequency Di⁃vision Multiplexing,OFDM)网络中无人机轨迹和资源分配的联合优化方案,重点研究了用户间最小速率对网络性能的影响。然而由于有限的电池容量不能满足无限信息传输所需的能量,无线设备的信息传输与寿命之间存在着内在的矛盾。
近年来,同步无线信息与能量传输(Simultaneous Wireless In⁃formation and Power Transfer,SWIPT)技术引起了广泛的关注。由于SWIPT可以将射频信号的能量转换为电能以支持无线信息传输,因此非常适合低功率IoT设备。时间切换(TS)和功率分割(PS)是两种经典的SWIPT模式。文献[10]研究了基于TS和PS模式的无人机协同通信网络的吞吐量最大化问题。文献[11]考虑了一种基于SWIPT−UAV的中继网络,分析了毫米波通信中基于PS模式的安全传输策略。为了降低接收端的复杂度,提高子载波利用率,文献[12]研究了基站同时向目标节点和中继节点发送信号的协作OFDM中继网络,然后中继节点将子载波分为两组进行信息传输和能量采集。文献[13]提出了基于广义频分复用(Generalized Frequency Division Multiplexing,GFDM)的协作中继网络模型,通过联合优化子块、功率和子批次分配,提高小区边缘用户信息率。然而现有的工作主要集中在固定基站的多载波交换网络,对于以无人机为空中基站的研究较少。
作为空中基站,无人机在三维空间的灵活性可以得到充分的利用,进一步提高多载波交换网络的性能。为此,这里提出了一种以无人机为空中基站的OFDM−SWIPT系统模型,通过联合优化无人机飞行轨迹和资源分配,以用户平均捕获能量为约束条件,使所有用户的平均可实现率最大化。
2 系统模型及问题描述
2.1 系统模型
考虑一个由无人机和K个用户组成的OFDM通信系统,如图1所示。无人机作为一个空中基站,同时向K个用户传送信息和能量,并且随机分布用户位置。第k个用户的水平坐标用Wk=[xk,yk]T,k= 1,…,K表示。为了避免无人机在爬升和下降过程中的能量消耗,这里假设无人机在无人机飞行周期T内以固定高度H飞行。为了便于分析,将T划分为M个相等的时隙,每个时隙的长度为δt=T/M。应将δt设置得尽可能小,以便可以假设无人机的位置为每个时隙内的常数。根据这种假设,无人机在第m个时隙的水平坐标为q[m]=[x[m],y[m]]T,m= 1,…,M,无人机的初始坐标和目标坐标分别用q[ 1] 和q[M]表示,最大飞行速度用Vmax表示。因此,周期飞行模式下的无人机轨迹应满足以下约束条件:

图1 OFDM通信系统Fig.1 OFDM Communication System
在每个时隙中,采用基于子载波分配的滑动方案。假设OFDM系统中有N个子载波,系统带宽Btot平均划分为N个子信道,子载波集用C={1,…,N}表示。在第m个时隙中,m= 1,…,M,子载波集C被分成两个子集和,分别用于信息传输和能量收集。在每个时隙中,一个子载波只能用于信息传输或能量收集。因此,子载波约束可以表示为:
无人机在每个时隙的发射功率预算是恒定的,用Psum表示。在第m个时隙中,m= 1,…,M,分配给第n副载波的发送功率由表示,n= 1,...,N。因此,子载波的功率分配应满足以下约束。
将第m时隙中的用户调度变量定义为={ 0,1} ,k=1,…,K,n= 1,…,N。如果=1,则在第m个时隙中将第N个子载波分配给第k个用户,否则=0。此外,每个子载波在每个时隙中只能分配给一个用户,因此,用户调度变量对于所有满足以下约束。
一般来说,无人机与用户之间的链路主要是视线链路,根据自由空间路径损耗模型,第m个时隙中无人机与用户之间的信道功率增益可以表示为:
2.2 问题描述
根据系统模型,第m个时隙内所有用户可达到的和速率可以表示为:
式中:B=Btot/N—子载波带宽;N0—加性高斯白噪声(Additive White Gaussian Noise,AWGN)的功率谱密度。第m个时隙中K个用户的平均收获能量可以表示为:
式中:ε—能量转换效率。
每个时隙中用户的平均收获能量阈值用Emin表示。给定每个时隙的Emin,这里目标是通过联合优化无人机的飞行轨迹和资源分配,使所有用户在飞行时间T内的平均速率可实现最大化。定义相应地,优化问题可表述为:
由于以下两个原因,问题式(11)难以直接解决。首先,用户调度变量A是二进制的,因此问题式(11)包含整数约束。其次,对于固定资源分配变量A,P,C1,CE,目标函数式(11a)和能量约束(11g)相对于无人机轨迹Q仍然是非凸的,因此问题式(11)实际上是一个混合整数非凸优化问题,很难处理该问题[14]。
3 这里方法
本节提出了一种替代迭代算法来解决问题式(11),首先将问题式(11)分为两个子问题。针对固定的无人机飞行轨迹,优化每个时隙的资源分配。然后,针对固定资源分配,对无人机轨迹进行优化。最后,两个子问题交替求解,直至达到预定的收敛条件。
3.1 用户调度、子载波和功率分配
对于固定无人机轨迹Q,资源分配变量{A,P,C1,CE} 可通过求解以下优化问题进行优化:
无人机的发射功率Psum、副载波集C和最小平均捕获能量Emin在每个时隙中是相同的。换句话说,不同时隙的资源分配是独立的。因此,问题式(12)可以进一步转化为一组M个优化问题,可以表示为:
由于问题式(13)中的M个优化问题具有相同的目标函数和约束条件,所以它们的求解方法也是相同的。其次,这里给出了第m个时隙优化问题的推导过程。
对于固定无人机的位置q[m],第m个时隙的资源分配仍然是一个混合整数非凸优化问题,很难直接求解。为此,提出了一种迭代算法,其目的是通过优化用户调度变量、子载波功率和子载波集()来最大化第m个时隙中所有用户的可实现和速率R[m]。
首先,针对初始子载波集和子载波功率优化用户调度变量。因此,式(13)中的优化问题可以表示为:
关于用户调度变量的优化问题式(14)意味着如何将n个子载波分配给k个用户以最大化所有用户的平均可实现速率。即需要将第n个子载波分配给能够使最大化的特定用户k*。因此,k* = arg max= 1且= 0,∀k≠k*。
然后,针对优化的用户调度变量和初始化的子载波集优化子载波功率。因此,式(13)中的优化问题可以表示为:
问题式(15)是一个非凸问题,可用拉格朗日乘子法求解。因此,拉格朗日对偶函数可以写为:
式中:ρ1、ρ2—受能量和功率约束的非负对偶变量,拉格朗日函数可以表示为:
因此,对偶优化问题可以表示为:
由于对偶函数是可微的,所以可以采用次梯度法求解问题(18)。那么,ρ1和ρ2的解的表达式为:
将优化后的对偶变量ρ1和ρ2代入式(17)。根据Karush−Kuhn−Tucke(rKKT)条件,子载波功率可以表示为:
式中:Pmax、Pmin—能量收集的最大和最小副载波功率。
通过交替地优化对偶变量ρ1,ρ2和子载波功率,可以获得最佳子载波功率,解决问题(15)的完整步骤见算法1。
最后,子载波集()由优化的和确定,将式(21)和式(22)代入式(17),拉格朗日函数L()可简化为:
其中,
算法1 求解问题式(15)的算法。
(2)do
(3)根据式(21)、式(22)计算。
(4)根据式(19)、式(20)更新。
(5)更新t=t+1。
(7)基于式(21)、式(22)得到和的最佳。
因此,用于信息传输的最佳子载波集可以表示为:
子载波集的求解过程可以描述如下:首先,将n(n= 1,…,N)代入式(24),得到。然后,,,…,按降序排序,然后依次分配给子载波集,直到满足≥Emin。最后,剩余的子载波被分配给子载波集。
通过对上述三个变量的交替优化,可以得到在第m(m=1,…,M)个时隙中的最优A*,P*和()。解决问题式(13)的完整步骤见算法2。
算法2 求解问题(13)的算法。
(2)do。
(3)通过解决问题式(14),计算。
(4)通过解决问题式(15),更新。
(5)通过解决问题式(25),更新,那么有
3.2 无人机轨迹优化
对于固定用户调度变量A、子载波集(CI)
CE和子载波功率P,无人机航迹Q的优化问题可以表示为:
由于式(27a)和式(27d)的非凸性,问题式(27)相对于无人机轨迹Q是非凸的,可以采用SCA技术来解决非凸问题。在每次迭代中,目标函数和能量约束式(27d)分别在给定的局部点用一阶泰勒级数展开代替。因此,通过放松目标函数和能量约束,可以将非凸优化问题转化为凸优化问题。具体地说,对于第l次迭代中给定的局部点q(l)[m],第(l+1)次迭代中的不等式可由下式得到:
其中,
同理:
其中,
通过上述泰勒级数展开,分别得到和的下界和,和相对于q[m]是凸的。因此,可以分别用和替换和。然后,可以将非凸优化问题(27)转化为:
目标函数式(34a)相对于q[m]是凸的,式(34b)是线性约束,式(34c)和(34d)是凸约束。因此,式(34)是一个凸优化问题,可以通过标准的凸优化求解器求解。
3.3 迭代算法
针对混合整数非凸优化问题式(11),这里提出了一种计算复杂度较低的迭代算法。将式(11)中的优化变量分为两部分:资源分配变量{A,P,C1,CE}和无人机轨迹Q,分别通过求解优化问题式(13)和式(34)进行优化。解决问题式(11)的完整步骤见算法3。
算法3 求解问题式(11)的算法。
(1)初始化:Q,φ,令l=0。
(2)do
(3)用给定的Q(l)解决问题式(14),并将解决方法表示为A(l+1),P(l+1),,。
(4)为已知的A(l+1),P(l+1),解决问题式(34),然后将解表示为Q(l+1)。
(5)更新l=l+ 1。
(6)while 目标函数的增量低于预定义的阈值φ> 0。
4 仿真结果及讨论
仿真结果验证了这里提出的联合无人机轨迹优化和通信设计方案的有效性,这里考虑了一个由单个无人机和K=5个用户组成的OFDM系统。用户随机分布在(150×150)m的区域内,假设无人机在固定高度H=50m飞行,子载波数N=16。系统带宽Btot=1MHz,平均分成N个子信道。副载波带宽是B=Btot/N=62.5kHz,假定AWGN的功率谱密度为N0=−70dBm/Hz,UAV和用户的定向天线增益设为G0=G1= 10dB。无人机最大飞行速度设为Vmax=30m/s,飞行周期设为T=20s,平均分为M=40 个时隙。在每个时隙中,UAV的发射功率预算设为Psum=3W,用户的最小平均收获能量设为Emin=3μJ,参考距离d0=1m处的信道功率增益设为β0=−30dB。
通过求解这里提出的优化问题,基于提出方法的优化无人机轨迹,如图2所示。将无人机初始轨迹设置为一个圆心,圆心为所有用户的几何中心,半径为用户间最大距离的1/2。通过调整无人机的飞行轨迹,可以很容易地观察到无人机与用户之间的距离很小。尤其是无人机在密集用户区上空飞行时间较长,甚至在用户上方盘旋。这一现象的主要原因是改善了无人机与用户之间的信道条件,进而提高了所有用户的平均可达速率和获取的能量。
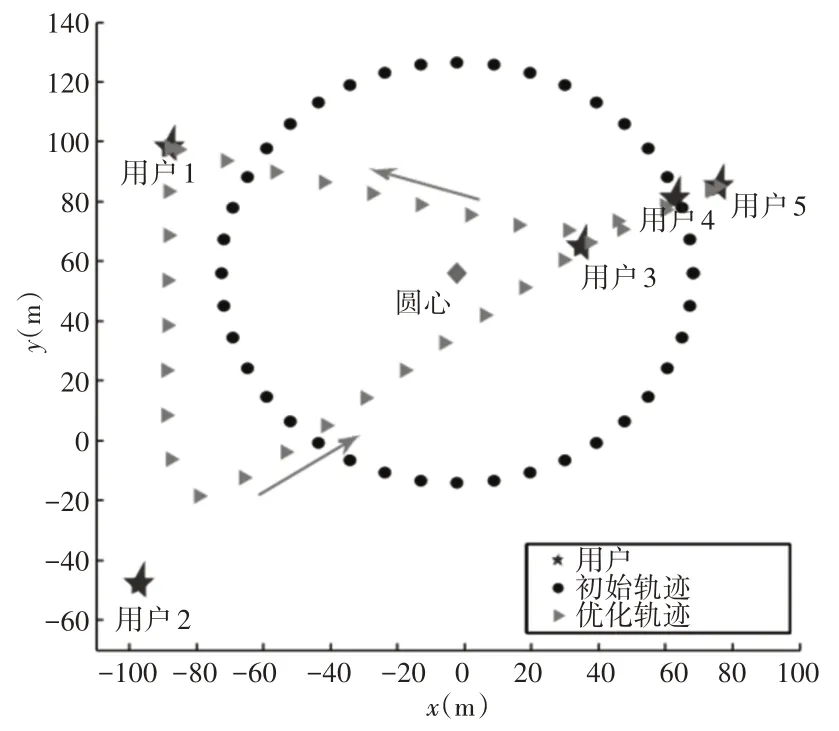
图2 提出方法的优化无人机轨迹Fig.2 Optimization of UAV Trajectory Based on the Proposed Method
用户2的新位置的优化无人机轨迹,如图3所示。用户2的水平坐标从[−97、−48]移动到[−20、−20],而其余用户的位置保持不变,因此,无人机可以在接近用户2的新位置时调整其轨迹。由于用户2的新位置靠近所有用户的几何中心,因此优化后的无人机轨迹可以覆盖包括用户2在内的所有用户。因此,这里提出的无人机轨迹与通信联合设计方案具有很强的鲁棒性,能够根据用户的位置自适应地调整无人机的轨迹。T=20s飞行期间不同时隙的平均收获能量,如图4所示。显然每个时隙的平均收获能量满足≥Emin,只有轻微的波动。原因可以解释如下,只要分配给能量收获集的子载波满足用户的最小平均收获能量,则将所有剩余的子载波分配给信息传输集。
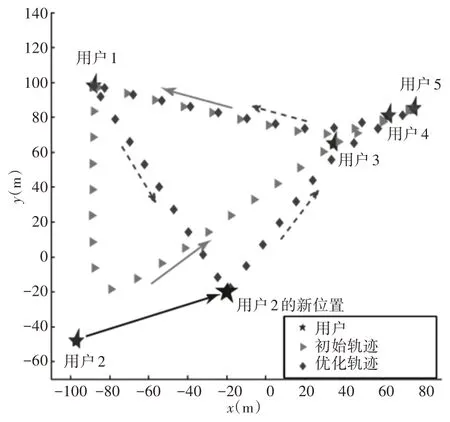
图3 用户2优化无人机轨迹Fig.3 User 2 Optimizing UAV Trajectory
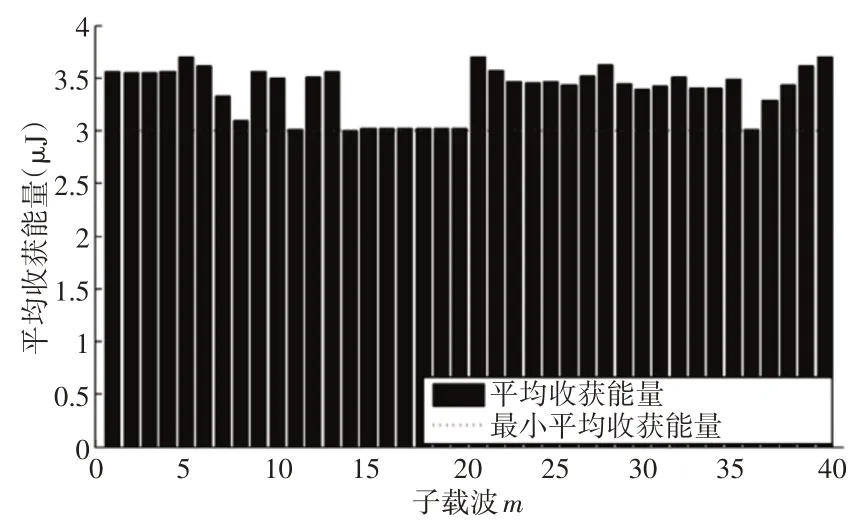
图4 不同时隙的平均收获能量Fig.4 Average Harvested Energy of Different Time Slots
不同用户在飞行时间T=20s时的能量收获情况,如图5所示。很明显,所有用户在飞行时间T=20s时都获得了各自的能量,但是不同用户的能量获得情况却有很大的不同,例如用户4只占用户1能量的四分之一。这种现象源于子载波分配机制,其中大多数子载波倾向于分配给具有最佳信道的用户。即当无人机靠近用户1飞行时,无人机与用户1之间的距离比其他用户短。由于用户1具有更好的信道条件,所以大多数子载波被分配给用户1。结果,用户1被服务很长时间并且比其他用户收获更多能量。因此,虽然子载波分配机制避免了更多的频谱资源浪费,但它没有考虑用户之间收获能量的公平性。

图5 不同用户在飞行时间T=20s时的能量收获Fig.5 Energy Harvesting of Different Users at T=20s
T=20s飞行周期内每个时隙内所有用户的平均可达速率,如图6所示。结合图2可以看出,不同时隙下的平均可达速率变化很大,主要受无人机与用户距离的影响。当无人机在第40个时隙悬停在用户5 上方时,无人机与用户5 之间的信道条件比其他用户好,因此大部分子载波和功率分配给用户5。结果,用户5 的可实现率的增加导致所有用户的平均可实现率的增加,如图2所示。相比之下,如图2所示,当无人机在第33个时隙远离所有用户时,无人机与所有用户之间的信道条件一般较差,因此所有用户的平均可实现速率和获得的能量相对较低。为了保证最小的平均获得能量,给分配了更多的子载波和功率,这会使平均可达速率降低。
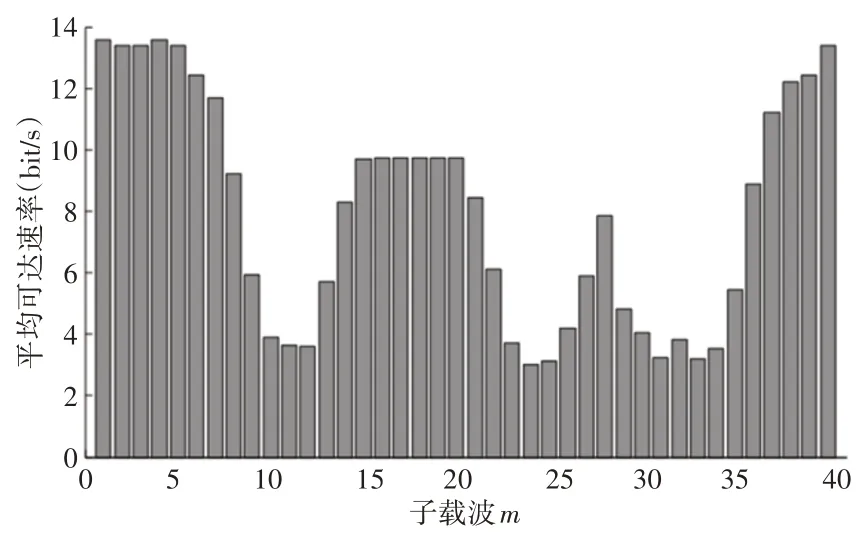
图6 所有用户的平均可达速率Fig.6 Average Achievable Rate of All Users
以下三种飞行模式下所有用户的平均可实现速率与飞行周期T的关系,如图7所示。模式一:无人机在K个用户的几何中心上方盘旋。模式二:无人机沿初始圆形轨道飞行。模式三:无人机沿优化轨迹飞行。从图7可以看出,模式三的平均可实现速率明显优于其他模式。此外,模式三的平均可达率随飞行周期的增加而提高,但前两种模式的可达率较差。主要因为随着飞行周期的增加,无人机可以利用更多的时隙在密集用户区上空盘旋,从而大大改善了无人机与用户之间的信道条件,提高了所有用户的平均可达速率。
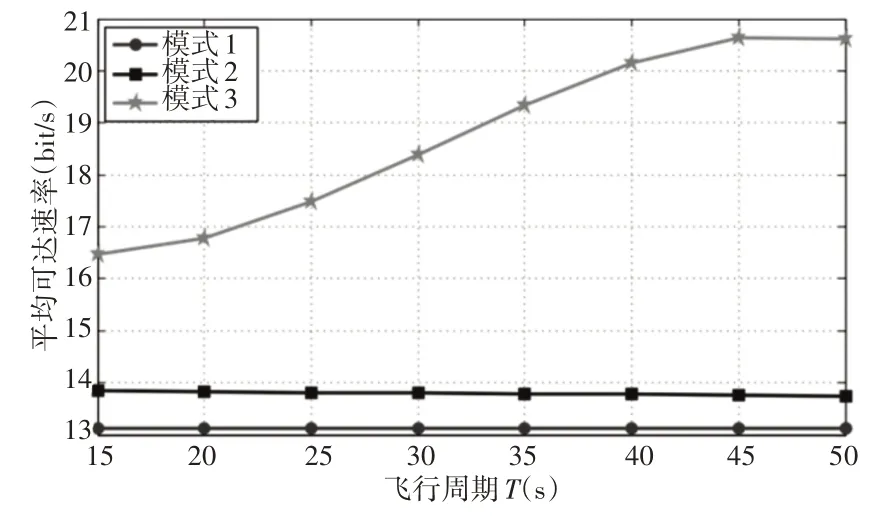
图7 平均可实现速率与飞行周期的关系Fig.7 Relationship Between Average Achievable Rate and Flight Period
这里优化方案的优化无人机轨迹与飞行周期T的关系,如图8所示。其中,无人机的最大飞行速度Vmax=30m/s。对于T=15s的情况,由于飞行周期短和飞行速度限制,无人机轨迹不能覆盖所有用户。为了最大化平均值,无人机放弃远端用户,剩余用户由无人机集中服务。随着飞行周期T的增加,无人机的飞行轨迹逐渐覆盖远用户。相比之下,密集用户区域通常由无人机提供服务,目的是改善信道条件,提高平均可实现速率和获得的能量。

图8 无人机轨迹与飞行周期的关系Fig.8 Relationship Between UAV Trajectory and Flight Cycle
该方案的优化无人机轨迹与无人机最大飞行速度Vmax的关系,如图9所示。其中,无人机的飞行周期T=20s。无人机的最大飞行速度Vmax受‖q[m+ 1 ]−q[m]‖2≤(Vmaxδt)2,m= 1,…,M−1的约束,因此不能设置得太小。根据固定的初始轨迹,可以推断Vmax的最小值为23m/s,在Vmax=23m/s的情况下,由于飞行周期和飞行速度的限制,无人机的轨迹不能覆盖所有用户。因此,在密集用户区的部分用户由无人机服务,以最大限度地提高平均可达速率。随着Vmax的增加,无人机的轨迹逐渐覆盖了所有用户,包括远端用户。此外,密集用户区仍由无人机集中服务。
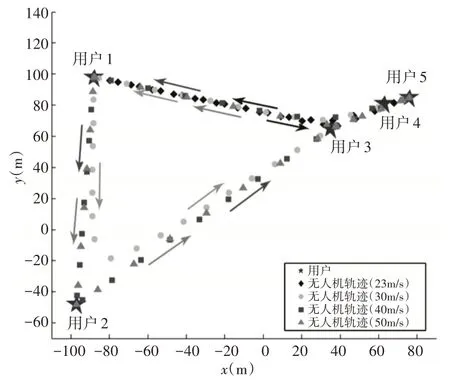
图9 无人机轨迹与无人机最大飞行速度的关系Fig.9 Relationship Between UAV Trajectory and Maximum Flight Speed
进一步将这里提出的方法与引言中提到的时间切换(TS)方法、功率分割(PS)、TS−PS 联合方法、PS 模式的安全传输策略(PSSTS)以及GFDM方法,在相同的用户平均收获能量的约束下,在Vmax=23m/s的情况下对比在用户平均收获能量的约束下各个方法的平均可实现速率,对比结果,如表1所示。从表中结果可知提出的方法相对与其他对比方法具有更大的平均可实现速率,且优势较为明显,进一步证明了提出方法的优越性。
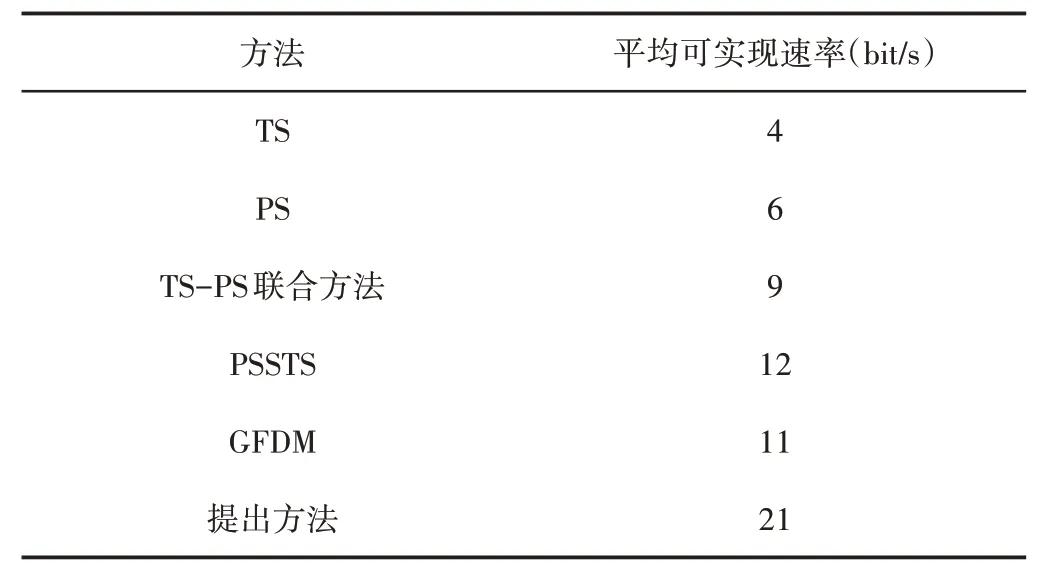
表1 平均可实现速率对比结果Tab.1 Comparison Results of Average Achievable Rate
5 结论
为了充分利用无人机在三维空间的灵活性,提出了一种提出了一种以无人机为空中基站的OFDM−SWIPT轨迹通信联合优化设计方案。
仿真结果证明了如下结论:
(1)该方案能够在用户平均收获能量的约束下,通过联合优化无人机轨迹、用户调度、子载波和功率分配,使所有用户的平均可实现速率最大化,从而有效解决了混合整数非凸优化问题。
(2)该方案既能保证平均捕获能量,又能提供与其他飞行模式相比的最佳平均可实现速率。充分利用了无人机在三维空间的灵活性,进一步提高了多载波交换网络的性能。
(3)该算法对于不同的应用场景均具有良好的收敛性和鲁棒性。
猜你喜欢
英语文摘(2020年10期)2020-11-26
测控技术(2018年7期)2018-12-09
铁道通信信号(2018年9期)2018-11-10
计算机应用(2016年10期)2017-05-12
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
西部广播电视(2015年10期)2016-01-18
计算机工程(2014年10期)2014-06-07
电测与仪表(2014年15期)2014-04-04
计算机工程(2014年6期)2014-02-28
