海杂波对机载雷达探测距离的影响
2023-08-16 05:01:28钟永磊
无线互联科技 2023年11期
钟永磊
(南京国睿防务系统有限公司,江苏 南京 210039)
0 引言
机载雷达在检测海上目标的过程中,海面情况会影响机载雷达对海面目标的探测距离,所以需关注海杂波干扰问题。 而且不同海情下的海杂波强度存在差异,海杂波对小型海上目标勘测距离影响较大。 高海情状态下的海杂波弱于目标信号,所以机载雷达可勘测到海面信号。 针对小型海上目标的勘测,海杂波强于目标信号,其对勘测距离影响较大。 近年来,我国学者及技术工作者从不同层面对海杂波与机载雷达探测距离的关系进行研究,并取得了一定进展。 在小型海上目标探测时,海杂波对海情的依赖程度较高,可利用分数布朗运动模型分析分型差量与干扰元素的关系。 此外,有研究指出,基于海杂波特性,可通过建立临近实际的地海杂波模型对机载雷达性能进行研究。 本研究主要对不同海情下的机载雷达飞行数据进行分析,探讨飞行阶段的海杂波数据,推演机载雷达在指定海情下的探测距离,为海上目标探测提供数据参考。
1 海杂波对探测距离的影响
机载雷达是在海杂波背景下勘测海面上静止或运动的目标,其在探测海上目标时会受到海杂波影响,而海杂波与噪声共同影响机载雷达工作性能[1]。
杂波的存在会影响雷达使用性能,导致目标勘测出现不同程度误差。 为了保证勘测数据的准确性,需了解机载雷达在不同条件下对海杂波的影响程度。 海杂波与噪声共同影响机载雷达工作性能[1]。
式(1)中:D 与S 和N 商值最小值相等,代表检测力因子。 海杂波环境下,N 采用干扰源、杂波与噪声功率之和代替,干扰源用J 表示,噪声功率用C 表示,S 和N 的比值可使用信号杂波功率比代替,也就是用信号杂比代替,表示为S/I。 根据上述转换关系,可将检测力因子转化为:
在机载雷达运行过程中,如果发现待勘测目标,海杂波与信号杂波比可表示为:
机载雷达探测海面上的载波区域目标时,海杂波对距离相近的区域和海面目标距离一致,也就是R 与Rc相同时,可以计算出雷达海杂波平均反射面积[2]。当探测距离与海面探测目标距离较远时,机载雷达视向入射余角角度较小,此时机载雷达天线方向图传播因子表示为:
式(4)和式(5)中:h1与h2表示机载雷达与探测目标高度,将机载雷达方向图传播因子带入雷达距离可得出方程:
式(6)中:θa代表天线方位波束宽度,θc表示天线俯仰波束宽度。Fc表示海杂波方向的方向传播因子,λ表示机载雷达工作波长,φ表示入射余角,σ0表示海杂波后向散射系数。代表海面目标平均RCS,L 代表机载雷达运行过程中的系统损耗。 综合式中各项数据,机载雷达对海面目标探测距离和海杂波方向图传播因子、杂波散射系数相关[3]。 如果机载雷达对海情勘测距离一定,可得出对应的海杂波系数,实际探测的距离和与真实海情之间存在一定差距,对此需了解机载雷达实际勘测距离与设计数值和海杂波系数以及天线方图之间的关系:
式(7)中Fc表示海杂波方向图传播因子。 如果入射余角无限接近于最大值,方向图传播因子等于1,这个时候海杂波方向图传播因子受海杂波影响可以忽略不计。 如果入射余角无限接近最小值,方向图传播因子受影响十分明显。 总的来说,机载雷达对海情探测距离和设计数值之间有一定关联。 为了判断实际海杂波与实现指标之间的关系,需了解不同海杂波情况下,杂波散射系数的数值,如此便可以得到设计数值与机载雷达实际探测距离[4]。 在试验操作中,获取试验过程中海杂波真实系数,保证试验数值的真实性。 通常而言,海杂波系数获得方法包括两种:第一种是采用杂波测量雷达检测。 在机载雷达飞行作业期间实际测量数值对应海区杂波系数[5]。 第二种是借助海杂波模型计算。 借助模型参数变量的关系求救海杂波系数。 在采用第一种方法时,海杂波系数主要通过实际测量得到,获得的数据十分可靠,但在实际作业过程中真实测量到的数据受成本及设备影响,很难得到满足实验要求的海杂波系数[6]。 所以第二种方法是相对可靠且采用度较高的方法,不仅实验成本相对较低,而且通过借助海杂波理论模型,结合探测区域气象条件求解海杂波系数,以此得到指标条件限制要求的机载雷达探测距离[7]。
2 海杂波散射系数模型的建立
机载雷达在检测海上目标时,既易受到海面余波、海面回波等因素的影响,又与海情也有着极为紧密的关联,如海浪高度与海面风向对机载雷达波束方向及设备表面污染度相关、海面回波与机载雷达部分参数有关、频率、极化以及波束入射余角均影响海面回波长度[8]。 由于影响海杂波强度的因素较多,且海情处于时刻变化的趋势,因此无法精准把握某个海域的海杂波系数。 目前,关于海杂波散射系数的模型较多,但仅适用于一定条件下,不适用于所有场景,测量的海杂波系数误差在几十dB 左右。 假定测量条件及测量人员不同,则测量结果无法作为误差评估的依据[9-10]。
GIT 模型是适用于海杂波散射系数计算的模型。该模型适用于X 波段机载雷达,且使用相对广泛。 从实验数据可以发现,这个模型和实践数据基本吻合,在机载雷达执行探测任务时,可以描述海杂波特性,作为海杂波分析的理论模型。
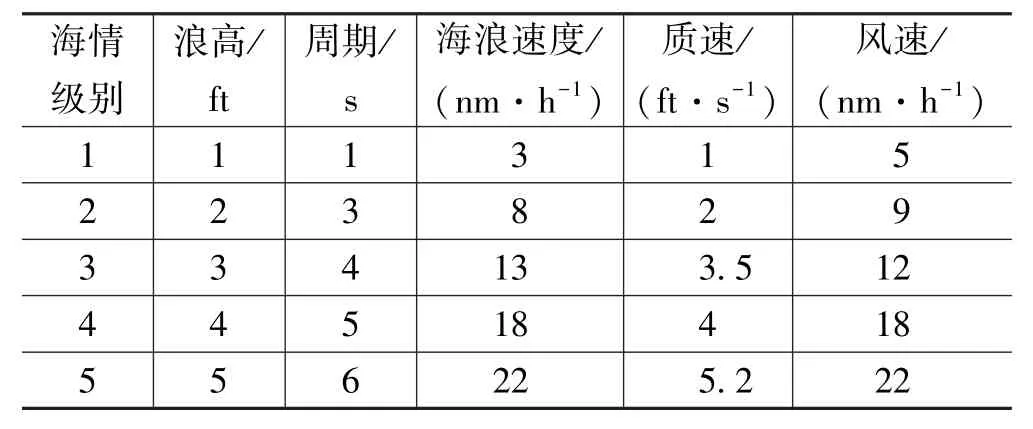
表1 海情描述
机载雷达执行任务的过程中,对海面照射时记录了飞行阶段海面海况级别,借助海杂波GIT 模型可计算出机载雷达在不同飞行高度下的海杂波散射系数。
3 机载雷达探测距离与海杂波的关系
假设飞机在海平面2 500 m 以上高度飞行,机载雷达探测距离为远离飞机180 km 的位置,也就是机载雷达发现海面目标的距离在180 km。 计算该区域180°范围内不同雷达视向和风向的夹角的数值,2 级和3 级海情水平极化仿真结果为:当风向和雷达夹角为0°时,2 级海情为-34.43 dB×m2/m2,3 级海情为-31.44 dB×m2/m2;当风向和雷达夹角为30°时,2 级海情为-34.79 dB×m2/m2,3 级海情为-31.88 dB×m2/m2;当风向和雷达夹角为60° 时, 2 级海情为-36.13 dB×m2/m2,3 级海情为-33.09 dB×m2/m2;当风向和雷达夹角为90°时,2 级海情为-37.77 dB×m2/m2,3 级海情为-34.78 dB×m2/m2;当风向和雷达夹角为120°时,2 级海情为-39.48 dB×m2/m2,3 级海情为-36.46 dB×m2/m2;当风向和雷达夹角为150°时,2 级海 情 为- 40.03 dB × m2/m2, 3 级 海 情 为-37.44 dB×m2/m2;当风向和雷达夹角为180°时,2 级海情为-41.43 dB×m2/m2,3 级海情为-38.45 dB×m2/m2。
假设飞机在海平面1 000 m 以上飞行,机载雷达照射区域距离飞机为90 km,也就是雷达发现海面目标的距离在90 km 左右。 对180°范围内的风险和视向夹角进行分析,3 级和4 级海情模拟数值为:当风向和机载雷达夹角为0°时,3 级海情垂直极化计算数值为-34.05 dB×m2/m2,4 级海情垂直极化计算数值为-32.19 dB×m2/m2;当风向和机载雷达夹角为30°时,3 级海情垂直极化计算数值为-32.69 dB×m2/m2,4 级海情垂直极化计算数值为-30.09 dB×m2/m2;
当风向和机载雷达夹角为60°时,3 级海情垂直极化计算数值为-29.05 dB×m2/m2,4 级海情垂直极化计算数值为-27.13 dB×m2/m2;当风向和机载雷达夹角为 90° 时, 3 级海情垂直极化计算数值为-23.91 dB×m2/m2,4 级海情垂直极化计算数值为-22.09 dB×m2/m2;当风向和机载雷达夹角为120°时,3 级海情垂直极化计算数值为-18.88 dB×m2/m2,4 级海情垂直极化计算数值为-17.06 dB×m2/m2;当风向和机载雷达夹角为150°时,3 级海情垂直极化计算数值为-15.19 dB×m2/m2,4 级海情垂直极化计算数值为-13.33 dB×m2/m2;当风向和机载雷达夹角为180°时,3 级海情垂直极化计算数值为-13.82 dB×m2/m2,4 级海情垂直极化计算数值为-11.98 dB×m2/m2。
结合试验阶段记录的海面气象情况,通过计算可得到飞行过程中海面杂波系数,从而计算海面目标实际距离与机载雷达的关系。 上述方案采用某型号机载雷达设备对海面试验数据进行验证,该方法符合预期效果。
4 结语
机载雷达对海面目标探测距离是机载雷达性能评估的主要指标。 海面目标探测距离和海浪高度等数据相关,意味着机载雷达探测海面目标存在多种不稳定因素,所以机载雷达对海面目标的探测不存在绝对距离。 本研究借助飞行过程中记录的试验海域浪高、风向等数据,可得到不同杂波情况下杂波散射系数。 依照杂波散射系数与探测距离的关系可求出杂波与雷达探测距离的关系,有效解决了机载雷达对不同杂波条件下探测距离的问题,对机载雷达海上试验具有一定价值。
猜你喜欢
物理学报(2022年22期)2022-12-05 11:16:04
科学与信息化(2021年30期)2021-12-24 08:00:20
海洋技术学报(2020年3期)2020-08-19 00:38:54
雷达学报(2017年6期)2017-03-26 07:52:56
系统工程与电子技术(2016年4期)2016-08-24 07:46:08
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
电子设计工程(2015年6期)2015-02-27 12:05:03
延安大学学报(自然科学版)(2014年4期)2014-03-13 23:21:34
延安大学学报(自然科学版)(2014年4期)2014-03-13 23:21:32