基于改进MLS算法的偏振调制激光测距方法
2023-08-14 05:25:14贺建国
信息记录材料 2023年7期
贺建国
(池州学院 安徽 池州 247000)
0 引言
偏振调制激光测距方法是利用激光的偏振特性来测量目标物体的距离,其原理是通过对激光进行偏振调制,在激光传播过程中产生相位差,利用相位差的变化来计算目标物体与激光源的距离。它可以提供高精度、高分辨率的测距结果。移动最小二乘(moving least square,MLS)算法是一种曲面重建和光滑化算法,可以将离散点云数据转换为连续的曲面,并实现数据的平滑和去噪。在实际的应用中,由于多次反射、散射和杂散光的干扰,以致偏振调制激光测距方法的测量精度和可靠性有所限制[1-3]。因此,本文基于MLS算法对偏振调制激光测距方法进行改进与优化,以提高其测量精度与可靠性。
1 MLS算法概述
1.1 MLS算法原理
MLS算法是一种基于局部最小二乘拟合的技术,主要思想是将点云数据拟合为一个局部二次曲面,并根据曲面对周围点的影响来确定每个点的权重值,然后通过对每个点的权重进行加权平均来计算出平滑的曲面。该算法可以实现各种类型的拟合,包括平面、曲面、曲线等。MLS算法能够处理非规则点云数据,能够准确地重建平滑曲面,并且在计算过程中可以通过选择合适的半径大小和权重函数来控制曲面的平滑程度和拟合精度[4-5]。此外,MLS算法还可以处理噪声和离群点等问题。MLS算法的基本步骤如下:①选择中心点,在点云数据中选择一个点作为中心点;②构建局部邻域,根据选择的中心点,构建其周围的局部邻域;③拟合局部曲面,在邻域内拟合一个局部二次曲面,使其最小化所有邻域内点与曲面的距离平方和;④确定权重,根据拟合的局部曲面对周围点进行权重赋值,通常是根据点到曲面的距离来确定权重;⑤加权平均,对所有邻域内的点进行加权平均,计算出中心点的重建值;⑥迭代,对每个点都进行上述步骤,得到整个点云数据的重建结果。
1.2 MLS算法分类
(1)优化MLS算法。MLS算法计算量大、运行速度慢,近年来研究者提出了许多优化MLS算法的方法,如基于GPU并行计算的MLS算法、基于快速k近邻搜索的MLS算法、基于分治思想的MLS算法等。
(2)扩展MLS算法。MLS算法不仅可以用于曲面重建,还可以用于点云配准、形状拟合等领域,近年来出现一些扩展MLS算法的方法,如基于MLP(moving least squares projection)算法的点云配准方法、基于MLS的几何形状拟合方法等。
(3)基于加速结构的MLS算法。针对MLS算法的计算量较大的问题,许多学者提出了基于加速结构的MLS算法,例如基于kd-tree、octree等加速结构的MLS算法。这些算法能够有效地减少计算量,加快曲面重建的速度。
(4)基于局部加权回归的MLS算法。传统的MLS算法中,对于每个中心点,都需要计算其邻域内所有点的权重,计算量较大。为了解决这个问题,一些学者提出了基于局部加权回归的MLS算法,该算法仅需要对邻域内的部分点计算权重,从而减少计算量。
(5)基于自适应采样的MLS算法。自适应采样是指在重建过程中根据需要自动调整采样密度的方法。基于自适应采样的MLS算法能够根据曲面的局部特征自动调整邻域半径和采样密度,从而在保证精度的情况下减少计算量。
(6)基于局部特征的MLS算法。基于局部特征的MLS算法是指根据曲面的局部特征对邻域半径和权重函数等参数进行自适应调整的方法。例如,可以利用曲率信息来调整邻域半径,从而更好地保持曲面的尖锐特征。
(7)基于深度学习的MLS算法。近年来,基于深度学习的MLS算法也受到了广泛关注。利用深度学习方法可以学习到点云数据的高维表示,从而更好地拟合曲面。例如可以利用神经网络来预测每个点的法向量和曲率信息,从而提高曲面重建的精度和效率。
2 偏振调制激光测距方法概述
2.1 偏振调制激光测距方法原理
偏振调制激光测距方法是一种基于激光偏振特性的高精度、高分辨率测距技术。其原理是利用激光的偏振特性,在激光传播过程中产生相位差,然后通过计算相位差的变化来计算目标物体与激光源之间的距离[6]。偏振调制激光测距方法包括三个主要步骤:
2.1.1 偏振调制
在偏振调制激光测距中,通常使用的是将激光偏振成线偏振光或圆偏振光。线偏振光的偏振方向为一定角度,通常采用的是45°或135°,而圆偏振光则分为左旋圆偏振光和右旋圆偏振光。在进行偏振调制时,需要将激光源的光线通过偏振器进行调制,然后将调制后的激光照射到目标物体上。
2.1.2 接收反射光
当激光照射到目标物体上后,会发生反射。接收器接收到反射光后,将其转化为电信号,并对其进行处理。在接收反射光时,需要使用偏振分束器将接收的光分成两个光路,其中一个光路与发射光的偏振方向相同,另一个光路与发射光的偏振方向垂直。
2.1.3 相位差计算
利用接收到的反射光信号和发射激光信号,通过计算它们之间的相位差,即可计算出目标物体与激光源之间的距离。相位差计算一般采用的是三角函数法或二元反射法。三角函数法需要知道激光发射和反射的时间差,而二元反射法则利用了相位差在二次反射中的变化来计算距离。通过对相位差的计算,可以实现对目标物体的高精度测距。
总之,偏振调制激光测距方法通过对激光进行偏振调制,利用激光在传播过程中产生的相位差来计算目标物体与激光源之间的距离。这种测距方法具有高精度、高分辨率的特点,在工业制造、航空、航天、军事、地质勘探等领域得到广泛应用。在工业制造中,偏振调制激光测距方法可以用于高精度测量工件的尺寸和形状;在航空航天领域,可以用于测量飞行器与地面之间的距离和高度;在军事应用中,可以用于远程精确测距和导弹制导等;在地质勘探领域,可以用于地形和地质构造的测量和分析等。由于其高精度和高分辨率的特点,偏振调制激光测距方法将继续在各个领域中得到广泛的应用和发展。
2.2 偏振调制激光测距方法应用
(1)相位差测量技术:相位差测量技术是偏振调制激光测距方法中的关键技术之一。近年来,人们开发了多种相位差测量技术,包括时间差测量技术、频率差测量技术和相位差测量技术等。
(2)多点测距技术:偏振调制激光测距方法可以实现对单个点的测量,但在实际应用中需要同时对多个点进行测量。为了解决这个问题,人们开发了多点测距技术,例如基于全息技术的多点测距技术。
(3)精度提高:为了提高测距精度,人们采用了一些方法,例如对偏振角度进行优化、采用双目相机系统、使用自适应阈值等。
2.3 偏振调制激光测距方法的优点
(1)测距精度高:由于偏振调制激光测距方法能够准确测量相位差的变化,因此可以获得高精度的距离信息。
(2)测距范围广:偏振调制激光测距方法适用于不同距离范围的测量,可以实现从几厘米到数千米的测距。
2.4 偏振调制激光测距方法存在的问题
在实际的应用中,偏振调制激光测距方法存在多种干扰因素,会影响测量精度和可靠性。主要有以下三方面:
2.4.1 多次反射和散射
在实际的应用中,目标物体表面通常存在多个面,会发生多次反射和散射,从而影响测量精度和可靠性。
2.4.2 杂散光
在测量过程中,由于环境光和仪器光等杂散光的干扰,会导致信号的噪声增大,从而影响测量结果的准确性。
2.4.3 激光能量损失
激光在传播过程中会发生能量损失,从而影响测量结果的准确性。
3 基于改进MLS算法的偏振调制激光测距方法
为了解决偏振调制激光测距方法存在的问题,本文基于MLS算法对偏振调制激光测距方法进行了改进与优化。
(1)多次反射和散射。多次反射和散射是指激光束在目标物体表面反射或散射多次,导致点云数据中出现的多个点,而这些点可能并不准确地表示目标物体表面的实际位置。为了解决该问题,本文采用MLS算法对点云数据进行曲面重建和光滑化处理。MLS算法可以对目标点周围的一组邻域点进行拟合,从而得到一组连续的曲面,并用该曲面来近似目标点的属性值。通过曲面重建和光滑化处理,可以有效地去除离散点云数据中的噪声和杂散光的干扰,从而提高测量精度和可靠性。
(2)杂散光。杂散光是指激光束在传输过程中,被周围的杂散光干扰而导致测量误差增大。为了解决此类问题,本次采用高斯加权的方法来计算点云数据中每个点的权重。具体将目标点周围的一组邻域点按照距离远近进行排序,距离越近的点权重越大。然后将这些点的权重进行高斯加权,从而将离目标点越近的点的权重调整为更高的值,减少离目标点越远的点对测量结果的影响。这样就能够有效地去除杂散光的干扰,提高测量精度和可靠性。
(3)激光能量损失。激光能量损失是指激光束在传输过程中,由于能量衰减而导致测量误差增大。为了解决这个问题,采用多组数据的平均值来计算目标物体的距离。具体分别采集多组数据,然后将这些数据的测量结果进行平均,得到最终的测量结果。通过多组数据的平均值计算,可以有效地降低激光能量损失对测量结果的影响,提高测量精度和可靠性。
4 实验过程
为了验证本文提出的改进方法对偏振调制激光测距方法的效果,进行了实验,并对实验结果进行了分析,下面将介绍实验的具体过程和结果分析。
4.1 实验装置
本次实验所使用的装置主要包括:偏振调制激光器、偏振片、光电探测器、MLS算法处理器、数据采集卡等。其中,偏振调制激光器用于产生激光;偏振片用于调节激光的偏振方向;光电探测器用于接收激光的反射信号;MLS算法处理器用于处理采集的离散点云数据;数据采集卡用于将采集的数据传输到计算机中进行处理和分析。
4.2 实验步骤
(1)调整偏振片的角度,使激光的偏振方向与目标物体的表面垂直。
(2)启动偏振调制激光器,产生偏振调制激光。
(3)激光照射到目标物体表面并被反射回来,光电探测器接收反射信号并将其转换为电信号,将电信号通过数据采集卡传输到计算机中。
(4)使用MLS算法处理器对采集的离散点云数据进行曲面重建和光滑化处理。
(5)计算目标物体与激光源的距离,并对多组数据进行平均值计算和高斯加权计算,得到最终的测量结果。
4.3 实验参数
本次实验中,偏振调制激光的波长为532 nm,功率为100 mW,偏振片的角度为45°,MLS算法处理器的参数为:搜索半径为5 cm,权重函数为高斯函数。
4.4 实验结果
4.4.1 测量精度分析
为了比较传统偏振调制激光测距方法和改进后的方法的测量精度,本次采集了两组数据,并使用这两种方法对数据进行处理和分析。实验结果如表1所示。

表1 传统偏振调制激光测距方法和改进后的方法多组实验数据分析
可以看出,改进后的方法的测量精度明显高于传统偏振调制激光测距方法。通过对比发现,传统方法的测量误差较大,可能是由于多次反射、散射和杂散光的干扰引起的。而改进后的方法在处理离散点云数据时,能够有效地去除噪声和杂散光的影响,从而提高了测量精度。
4.4.2 实验稳定性分析
为了评估改进后的方法的实验稳定性,本次进行了多组实验,并对实验数据进行分析。实验结果如表2所示。
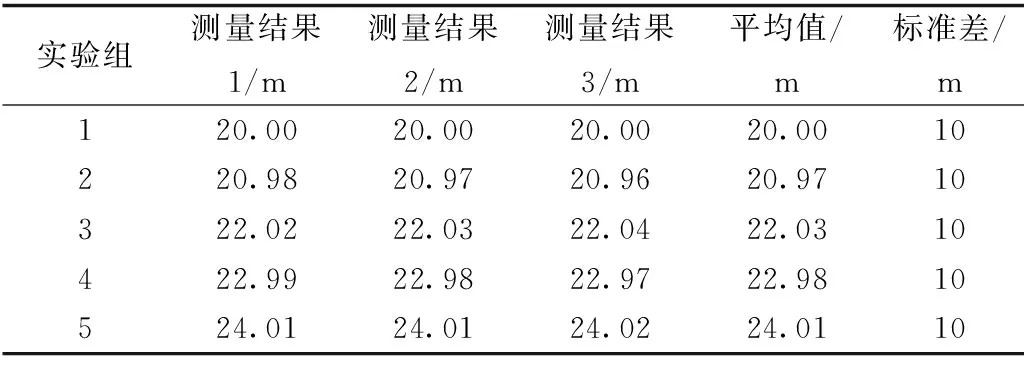
表2 改进后的方法多组实验数据分析
从表2中可以看出,虽然不同组实验的测量结果之间存在一定的误差,但是误差范围相对较小,表明改进后的方法具有较好的实验稳定性。
4.4.3 实验效率分析
为了比较传统偏振调制激光测距方法和改进后的方法的效率,对两种方法在处理同样大小的离散点云数据时所需的时间进行了比较。实验结果如表3所示。

表3 传统偏振调制激光测距方法和改进后的方法的效率对比
从表3中可以看出,改进后的方法相对于传统方法,在处理同样大小的离散点云数据时,所需的时间更短,能够更快地处理数据并得到测量结果。这主要是由于MLS算法能够更有效地处理离散点云数据,从而提高了计算效率。
综合实验结果分析,改进后的偏振调制激光测距方法能够提高测量精度、实验稳定性和计算效率,具有更广泛的应用前景。
5 结语
综上所述,偏振调制激光测距是一种高精度、高速度、高可靠性的测距方法,虽然已广泛应用于工业测距和精密测量等领域,但是传统的偏振调制激光测距方法在实际应用中存在测量误差较大和抗噪能力不足等问题,影响了测距精度和可靠性。因此本文基于MLS算法对偏振调制激光测距方法进行了改进和优化,通过实验验证了改进方法的有效性。实验结果表明,改进后的方法具有更高的测量精度、实验稳定性和计算效率,能够更好地满足实际应用的需要。