智能化应急救援系统的设计与实现
2023-08-14 05:25:12陈虹安陈冬昌马洽颖刘茂林
信息记录材料 2023年7期
陈虹安,陈冬昌,马洽颖,刘茂林
(江门职业技术学院 广东 江门 529000)
0 引言
近年来,自然灾害频频发生,造成了巨大的损失[1]。人们不能阻挡灾害的发生,但灾后救援却是力所能及之事,其中伤员救援更是重中之重。灾害发生的48 h内是最佳的救援时间,可灾后环境复杂多变,灾后生命体位置无法确定严重阻碍着救援工作的开展,同时也对救援人员的生命造成了威胁[2]。本文设计了一款多功能智能化应急救援系统。该系统可以在危险环境中代替人体进行环境参数的检测及灾后生命体的探测等工作,为救援工作提供重要的依据。
1 系统方案
移动机器人可分为轮式机器人、履带式机器人、仿生足式机器人和混合式机器人四大类[3],它们各有其优缺点,具体如表1所示。由于多足机器人在瓦砾地面、狭窄空间的适应能力和穿越能力非常强[4],非常适合灾后环境的救援工作。因此,本课题将六足机器人作为搜索机器人,进行设计和控制技术的研究。

表1 各类移动机器人比较
本项目设计的智能化应急救援系统主要以六足机器人越障系统作为载体,搭载灾后环境及生命体探测系统,可在瓦砾地面、狭小空间内穿行,采集灾后信息数据,并基于无线传感网络将采集到的数据传送至手持终端,也可以通过手持终端向机器人发送控制命令。系统总体设计如图1所示。

图1 系统总体设计框图
2 功能与指标
2.1 智能化应急救援系统主要实现功能
2.1.1 开发六足机器人越障系统
实现六足机器人越障系统的开发。控制六足机器人多条腿协调动作,优化该机器人在瓦砾地面、狭小空间内适应能力与穿越能力,使适应于灾后的复杂、未知环境,能在恶劣的灾后环境中进行越障、探测等灾后救援工作。
2.1.2 开发灾后环境与生命体探测系统
实现智能救援机器人对灾后环境参数与生命体的实时探测。智能救援小车的生命体探测系统以STM32单片机为核心,采用火源检测模块、温湿度检测模块、可燃气检测模块、CO检测模块等对灾后的火源、温湿度、可燃气体及CO等参数进行实时检测,采用红外生命体检测模块对生命体进行检测并且实现实时上传手持终端。
2.1.3 开发基于无线传感网络数据传输、手持终端实时显示与控制系统
实时上传智能小车采集的灾后环境及生命体参数至手持终端,并且可进行遥控及实时显示,作为救援人员监控、指挥和决策的重要依据。
2.2 本系统的技术指标
本项目严格按照国家相关标准确定本项目产品的技术条件,同时发挥无线通信技术、地磁感应技术特色,主要达到以下标准。
(1)智能化应急救援系统中所有检测参数的检测精度达到国家规定的标准;
(2)控制终端中的遥控流畅,传输的视频清晰;
(3)具备完善的保护功能和故障自诊断功能,包括设备过流保护、欠压报警、电池耗尽报警和设备破坏的保护;
(4)实现与手持终端的实时传输,可主动发布实时检测信息。
3 硬件设计
3.1 六足机器人运动学模型
六足机器人是由机架、六条腿及相应的关节组成的一个多支连运动结构[5],如图2所示。为了让机器人实现运动并能灵活地在各种复杂环境移动,需要针对机器人运动位置、每条腿3个关节的转动角度、位置关系进行设计[6]。本文采用D-H数学模型建立六足机器人运动学模型。

图2 搜救机器人模型

图3 搜救机器人单腿结构
D-H矩阵为:
n-1Tn=Trans(ai,0,di)rotzn-1(θn)rotxn(α)
(1)
(2)
(3)
(4)
经计算,可得:
(5)
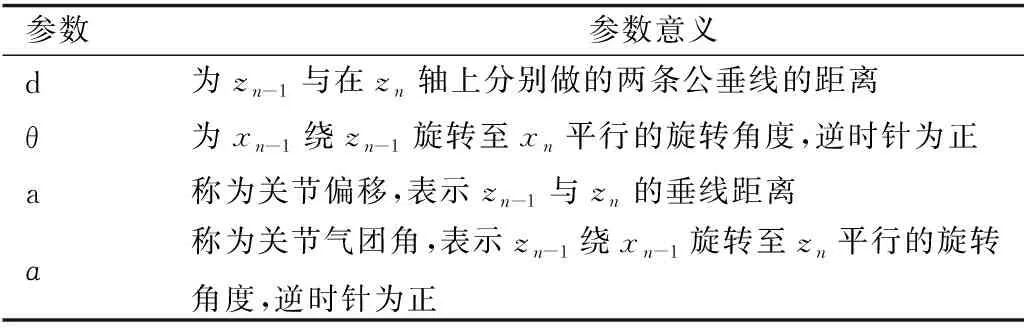
表2 各参数意义
3.2 机器人核心控制板设计
在该系统中,主要是由2个单片机座位电路设计的芯片,其中stm32F103c8t6进行传感器信息的收集和传输信息,stm32f103zet6进行舵机控制运算,核心控制板设计如图4所示。

图4 核心控制板设计
STM32F103ZET6是STM32家族中性能比较高端的单片机[7],将单片机作为智能搜救系统的主控控制器芯片,其内核主要是Cortex-M3。处理速度快,工作效率高。
3.3 电源稳压及其电路设计
智能化应急救援系统电源采用的是2S锂电池,其输出电压为7.4 V。由于不同的模块用的电源各不相同[8],如MCU与空气检测模块所需电压分别是3.3 V与5 V,所以设计了不同的电路来输出不同的电压供各个模块使用,如图5所示。
MP1584是一种高性能高频降压芯片[9],通过芯片MP1584来输出稳定的5 V,并且带负载能力也能达到要求。
4 系统软件设计
整体程序可划分为3大部分:
(1)主程序部分。该程序主要进行系统的初始化操作,开外中断、设置定时器,让机器人处于复位状态,然后主程序循环判断命令,如果判断是开启自动运行生命探测系统,机器人就会开始自动运行爬入废墟。同时每隔2 s就对附近的温度进行检测,同时传出数据。
(2)环境检测系统,当机器人处于开机状态时,有害气体的查询也会同时开启,当查询到有害气体时,机器人会大声报警并将数据传输到上位机。
(3)外部中断程序。该部分程序主要是当生命检测系统探测到生命体后可以跟受灾者进行语音,同时对受灾者进行物资援救,增加受灾者生存率,也为消防救灾者提供点上的帮助[10]。
5 系统测试
5.1 避障测试
机器人在行走的过程中,超声波传感器发出超声波信号。遇到障碍后,将数据反馈到机器人,通过时间差来判断机器人与障碍之间的距离。测试超声波避障反馈回来的数据如图6所示。
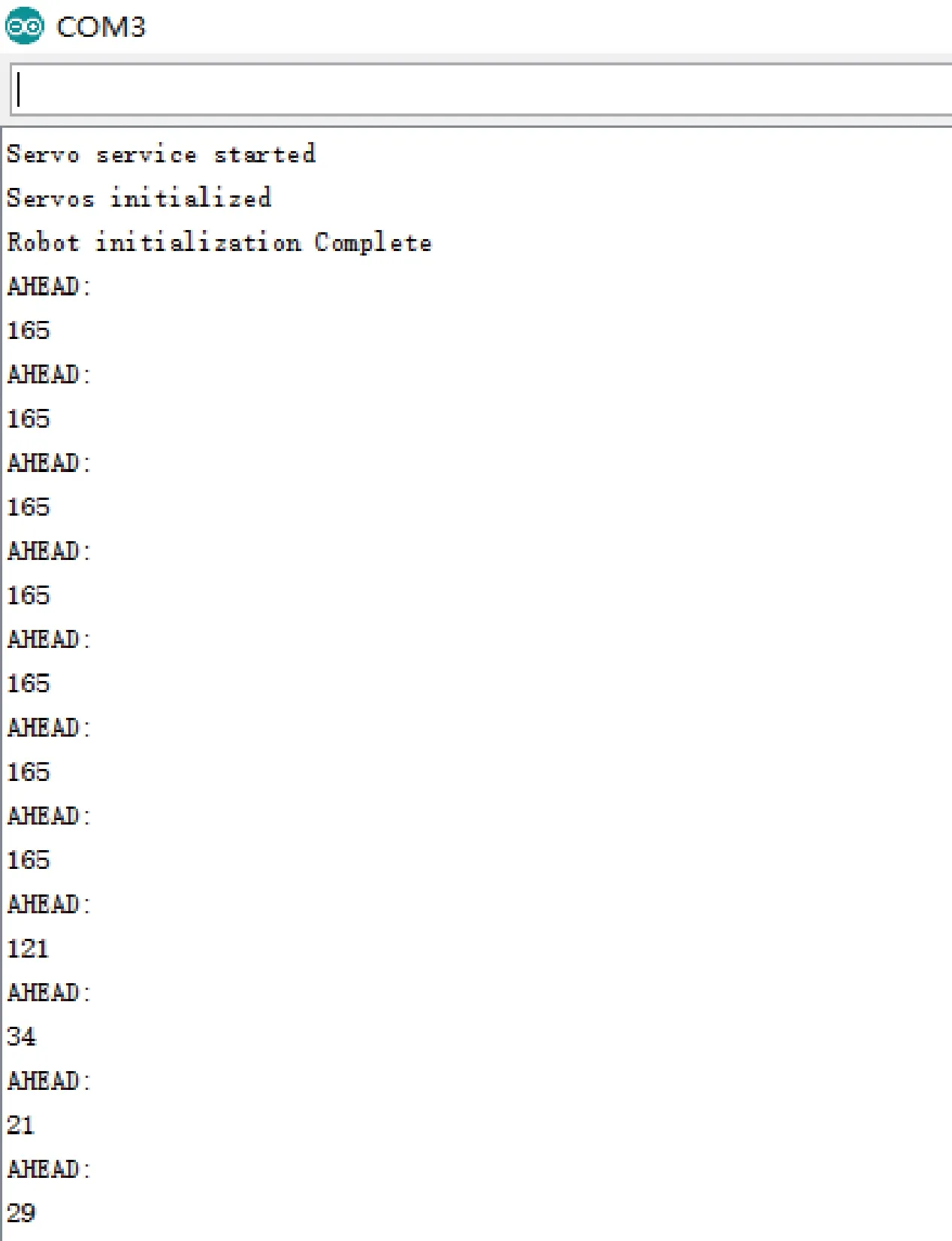
图6 超声波避障反馈回来的数据
5.2 环境参数及生命体检测测试
智能化应急救援系统实现对灾后环境参数测量和灾后生命体的实时探测。如图7所示。

图7 环境参数及生命体检测图
5.3 App控制测试
本作品的App的控制键有开、关、坐下、招手、摇手、前进、后退、左转、右转等按键,可进行自动循迹避障,并可传送摄像头画面等数据至上位机。如图8所示。

图8 手机控制过程测试
6 功能与特色
(1)实现六足机器人越障系统的开发。控制六足机器人多条腿协调动作,能在恶劣的灾后环境中进行越障、探测等灾后救援工作,在搜救辅助方面非常有价值。
(2)实现对灾后环境参数与生命体的实时探测。智能化应急救援系统集灾后的火源、温湿度及CO等多参数检测于一体,实现了复杂多变的灾后环境的实时检测;实现了灾后生命体的探测,为救援人员提供了准确的生命体位置,为救援节省了时间,增加了生命体幸存的概率。
(3)实时上传采集的灾后环境及生命体参数至手持终端,并且可进行遥控及实时显示,作为救援人员监控、指挥和决策的重要依据。
7 结语
综上所述,智能化应急救援系统采用了六足机器人为载体,能够在灾后形成的瓦砾地面、狭窄空间内稳定穿越,实时监测复杂多变的灾后环境参数,实现灾后生命体的探测;能将相关参数实时传输至控制台,为救援工作的实施提供了重要的依据。