骨科手术机器人的研究进展及发展展望
2023-08-14 12:34李金泉王九龙罗杨宇
医疗卫生装备 2023年6期
李金泉,王九龙,罗杨宇
(1.北京邮电大学现代邮政学院(自动化学院),北京 100876;2.中国科学院自动化研究所,北京 100190)
0 引言
现代骨科手术对精细、微创治疗的要求使得常规骨科治疗常常无法满足社会需求[1]。随着骨科手术机器人的发展,骨科手术中假体的准确放置、人为偏差的去除和校准等问题的解决,大大地促进了骨科手术往精细化、个性化、微创化等方向发展[2-3]。骨科手术机器人能够提供手术规划模拟、导航及微损伤精确定位操作等功能,为医师的决策判断和操作提供了参考,有效提高了骨科手术的操作质量,具有重要的临床应用价值。本文介绍骨科手术机器人在关节骨科、脊柱外科和创伤骨科领域的研究进展,并对现有骨科手术机器人的优势和不足进行系统分析,提出骨科手术机器人的研究热点和发展趋势,以为骨科手术机器人的发展提供参考。
1 骨科手术机器人的研究进展
1.1 关节骨科手术机器人
最早出现在商业应用中的是关节骨科手术机器人[4],其主要任务是完成对人体关节的置换任务,如髁膝关节置换、全髋关节置换[5]。人体关节置换术中的主要考虑因素是人体关节假体的关节线和位置的准确性。在关节骨科手术机器人应用之前,关节假体的摆放位置由医生根据经验进行判断和决定[6],医生的主观经验是手术能否顺利完成的关键。
1992 年,Integrated Surgical Systems 公司推出了主动操作型的Robodoc 机器人,用于辅助关节置换手术[7-8]。Robodoc 机器人[如图1(a)所示][2]以水平关节型串联结构为基础,联合末端执行器,在完成手术规划后,可自行进行切割磨削操作。但其存在手术时间过长、系统稳定性较差、较高的术后并发症等风险和缺点,还需要不断改良。TSolution One 为该公司最新推出的主动式关节置换机器人[如图1(b)所示],其由三维术前规划工作站和膝关节、髋关节计算机辅助工具组成,主要用于全膝关节置换手术,支持多家制造商的关节植入物[9-10]。相对前代Robodoc 机器人,其手术时间及并发症发生率有所减少,系统稳定性有所提升,可以在没有医师介入的情况下实现自动磨骨操作。但由于缺乏长期、高质量的临床数据,该机器人的有效性仍有待确定。

图1 国外关节骨科手术机器人
2008 年,MAKO Surgical 公司推出具备实时导航系统的RIO 机器人[如图1(c)所示][2],该机器人由操作平台、摄像立架和机械臂3 个部分组成,通过对患者术前的CT 影像分析来完成术前规划和术中导航,在手术中可以计算髋关节联合前倾角、长度和偏心距,也可以辅助操作医师对假体的位置进行修正和调整[11]。同时,其采用主动约束控制方式,通过多个动态虚拟边界对器械进行引导,系统精度可达到1 mm。
2012 年,Blue Belt Technologies 公司推出无图像、手持式、半主动型Navio PFS 机器人[如图1(d)所示],用于膝关节置换[12-13]。该机器人由手持切削工具、显示系统和器械跟踪系统组成,其中显示系统用于可视化手术过程,跟踪系统用于监视手持切削工具的位姿,以便手术医师在操作过程中对钻孔工具的位置进行调整和追踪。其无需借助术前预成像进行导航,而是术中在患者关节表面安装解剖标记点,利用红外影像进行定位导航,以按照规划完成精确的截骨操作,在踝膝关节置换手术中测试,该机器人术后角度误差为1.46°,平移误差为0.61 mm[14]。同时,该机器人还具有独特的可伸缩切割模块钻头,当术中切割器械超出规划范围时,钻头自动回缩到保护套内,以防止对患者造成损伤。Lonner 等[15]采用Navio PFS 机器人辅助开展踝膝关节置换手术,结果表明患者术后关节恢复较好,置入假体位置准确,没有位置旋转和偏移。
2020 年,Smith&Nephew 旗下的Cori 单踝和全膝关节置换手术机器人获得美国食品药品监督管理局(Food and Drug Administration,FDA)批准[16]。Cori机器人采用无图像智能映射来构建患者解剖3D 模型,从而减少术前CT 成像时间、成本和辐射暴露。同时该机器人采用便携式设计,具有十分小巧的体积,是目前骨科手术机器人市场上体积最小、最便携的机器人之一。
2021 年,FDA 批准了美国强生公司的VELYS机器人,该机器人无需术前成像,采用NATURAL CONTROL 技术,可在全膝关节置换手术中协助外科医生精准切除骨骼[17]。同时,该机器人高效精巧的设计,使其可固定在手术床上即插即用,大大扩展了手术场景。
关节骨科领域成熟的机器人还有OMNI Botics机器人[如图1(e)所示][18]和ROSA Knee 机器人(Zimmer Biomet 公司)[如图1(f)所示][19]等。OMNI Botics机器人用于全膝关节置换手术,该机器人无需术前CT 影像,切割模块固定在股骨或胫骨上,完成切割模块的固定后,医生在辅助模块的精确限制下分次完成截骨操作机器人[18,20]。与其他机器人不同的是,其具有机器人软组织张力测定技术,可以用预测平衡工具(OMNIBotics BalanceBotTM)规划植入物的位置。在进行截骨之前,使用OMNIBotics BalanceBotTM测量软组织平衡,并规划骨骼切割路径,以在整个膝盖运动范围内实现所需的平衡。同时使用OMNIBotics BalanceBotTM能够在进行切割之前预测由此产生的韧带张力,从而减少对软组织的创伤和局部炎症反应及术后疼痛,以最快的时间实现功能恢复。ROSA Knee 机器人是半开放(可以与一家制造商的几个植入物一起使用)、半主动型的机器人[19,21],在进行全膝关节置换手术中[22],不需要术前影像数据,配准时参考系静态地固定在股骨和胫骨上。与其他骨科手术机器人不同,其截骨过程中没有触觉反馈,机械臂仅协助放置传统切割夹具,最后由医师按常规方式完成切骨操作。
国内对关节骨科手术机器人的研究起步相对国外比较晚。上海长征医院2009 年研制出全膝关节置换手术系统——华佗,该系统采用了一台配备立体视觉系统的工业机器人作为机械臂[23-24]。该机器人的视觉系统由2 个红外摄像头组成,位于机械臂的末端,红外摄像头可以捕捉到固定在病患骨骼上的红外标记物和红外定位探针的图像,从而生成病患骨骼的立体视觉显示,以指导手术工具的精确定位和安置,同时机械臂上还装有电动切割设备,作为手术工具使用。与标准全膝关节置换工具的对照实验结果表明,传统手术器械组在准确性和稳定性等方面的表现都逊色于该机器人[24]。
2019 年,和华外科自主研发的基于CT 影像、半主动的全膝关节置换手术机器人[HURWA®和华TM机器人,如图2(a)所示]完成注册检验[25]。该机器人兼具手术导航和截骨功能,其主要由3 个部分组成:一个光学侦察单元、一个用户界面模块和一个医用七轴机械臂。光学侦察单元使用光学跟踪技术将切割导板固定并保持在所需位置,以实现术中规划。七轴机械臂使用刀臂一体化设计,可实现自动对刀,满足全部截骨位置需求,且无需更换刀具,同时该机械臂可锁定截骨平面,精准控制截骨量和角度,实现轻松的截骨操作。此外,其导航系统可实现亚毫米级精准定位,术中无需开髓,可减少软组织损伤和骨折等风险。对比研究显示,与传统的截骨技术相比,HURWA®和华TM机器人显著提高了截骨的切除水平和角度的准确性,使用HURWA®和华TM机器人的所有截骨切除水平精度均低于0.6 mm(标准偏差低于0.6 mm),骨切除角度均低于0.6°(标准偏差低于0.4°)[25]。2020 年,北京协和骨科使用其完成中国首例机器人全膝人工关节置换手术[26]。2022 年,该机器人获得国家药品监督管理局(National Medical Products Administration,NMPA)上市批准,成为国内首款获NMPA 认证的国产膝关节手术机器人。

图2 国内关节骨科手术机器人
2020 年,天智航推出TiRobot Recon 全膝关节置换手术机器人,该机器人由机器臂引导截骨,无需更换工具、打骨针和开髓即可完成定位截骨,大大地减少了手术创伤,提高了切骨精度[27]。同时其创新地将膝关节力负荷和伸屈间隙平衡等多种信息进行整合分析,构建出全膝关节置换术中的决策模型及术后疗效评估系统,帮助术中更好地实现自然下肢力线的重建和软组织平衡的兼顾,以实现最佳的临床效果和患者满意度。但目前还没有该机器人临床应用的案例。
2021 年,键嘉ARTHROBOT HIP 髋关节置换机器人[如图2(b)所示][13]完成临床实验,该机器人主要由脚踏开关、加密装置、机械臂系统、光学定位系统、导航控制系统、术前规划软件6 个部分组成,可辅助医师完成髋臼打磨、股骨截骨、髋关节假体安装等工作,与传统人工髋关节置换术相比,可以保证手术定位精度,降低不良事件和并发症的发生概率,减轻X 射线对医生和患者的辐射损伤[28]。临床实验结果表明,其髋关节置换术中髋臼杯的外展角和前倾角误差在1°以内,术后双肢长度差异在5 mm 以内[29]。2022 年,ARTHROBOT HIP 获得上市批准,成为NMPA 认证的中国首款髋关节手术机器人。
2022 年,骨圣元化自主研发的锟铻®膝关节置换手术导航定位系统获得NMPA 的上市批准[30]。该机器人为半主动型骨科机器人,主要由导航仪系统、机械臂系统(齿轮驱动、七自由度)、主控车系统和手术电动工具组成。其通过机械臂末端控制截骨摆锯姿势及角度,并将摆锯运动限定在截骨平面内,通过主动约束增加了截骨操作的安全性。动物实验和尸体实验均证明该机器人能按照术前规划的截骨角度及厚度进行截骨[31]。
2022 年鸿鹄®骨科机器人[如图2(c)所示]获得NMPA 批准[32-33]。该机器人为半主动、轻便型膝关节置换手术机器人,具有高精度、动态追踪和轻量化的灵巧构型设计及边界控制等特性。鸿鹄®骨科机器人基于CT 影像可以提供具有更多细节的3D 骨骼模型来定义假体的摆位,包括横断面、冠状面和矢状面的假体对线。术前医师根据CT 数据及患者生理解剖学特征生成个性化假体植入手术方案,术中截骨工具前端结合光学导航引导,配合轻量化高灵巧机械臂高精度地执行术前规划方案,同时引入了关键电气硬件冗余设计、核心部件控制系统安全监控与报警、导航系统路径规划与监控3 层安全保护体系,可全方位保证患者术中安全。2021 年,Xia 等[33]对采用鸿鹄®骨科机器人进行全膝关节置换手术的31 例患者的临床数据进行了分析,显示患者下肢比对角、冠状股成分角和冠状胫骨成分角的实际术后角与术前计划角之间的绝对误差分别为(1.46±0.95)°、(1.13±1.01)°和(1.05±0.73)°。且所有患者术后没有发生手术部位感染、没有形成静脉血栓和神经损伤等相关并发症,进一步表明其具有良好的截骨精度,可以很好地达到假体术前规划角度。
关节骨科手术机器人经过30 余年的发展,技术相对其他骨科手术机器人已经相对比较成熟。但是这些关节骨科手术机器人大多集中在膝关节和髋关节等部位的置换手术,而对于肘关节和肩关节等部位还没有相应的机器人。
1.2 脊柱外科手术机器人
椎弓根钉的固定是脊柱外科手术机器人主要针对的手术术式[23]。脊柱外科手术机器人致力于降低手术对血管神经的损伤、减少术中辐射伤害和提高螺钉的置入精度等问题,保证脊柱手术操作的精确性和安全性。
2004 年,FDA 批准了使用2D 透视导航技术的SpineAssist 机器人[(如图3(a)所示]用于脊柱手术,其采用Stewart 并联机构构型,重复定位精度可达0.01 mm[34]。SpineAssist 机器人设计十分轻量化和小型化,质量不超过250 g,可以直接放置于患者脊柱上,同时由于Hover-T 技术在该机器人上的应用,安装更加方便,适应能力更强。2011 年,FDA 批准了由SpineAssist 机器人升级的Renaissance 机器人[如图3(b)所示][2],Renaissance 机器人在核心技术上与SpineAssist 机器人相同,但更侧重于高风险的脊柱手术,原本的2D 图像被3D 图像所取代[34],手术医师能获得更加准确的图像来指导手术。根据椎弓根螺钉内固定术临床研究显示,Renaissance 机器人精确置入比例为94.5%,远远高于传统方法的91.5%[35]。但Renaissance 机器人也存在无法在术中进行实时监控和手术操作过程十分烦琐等缺陷。
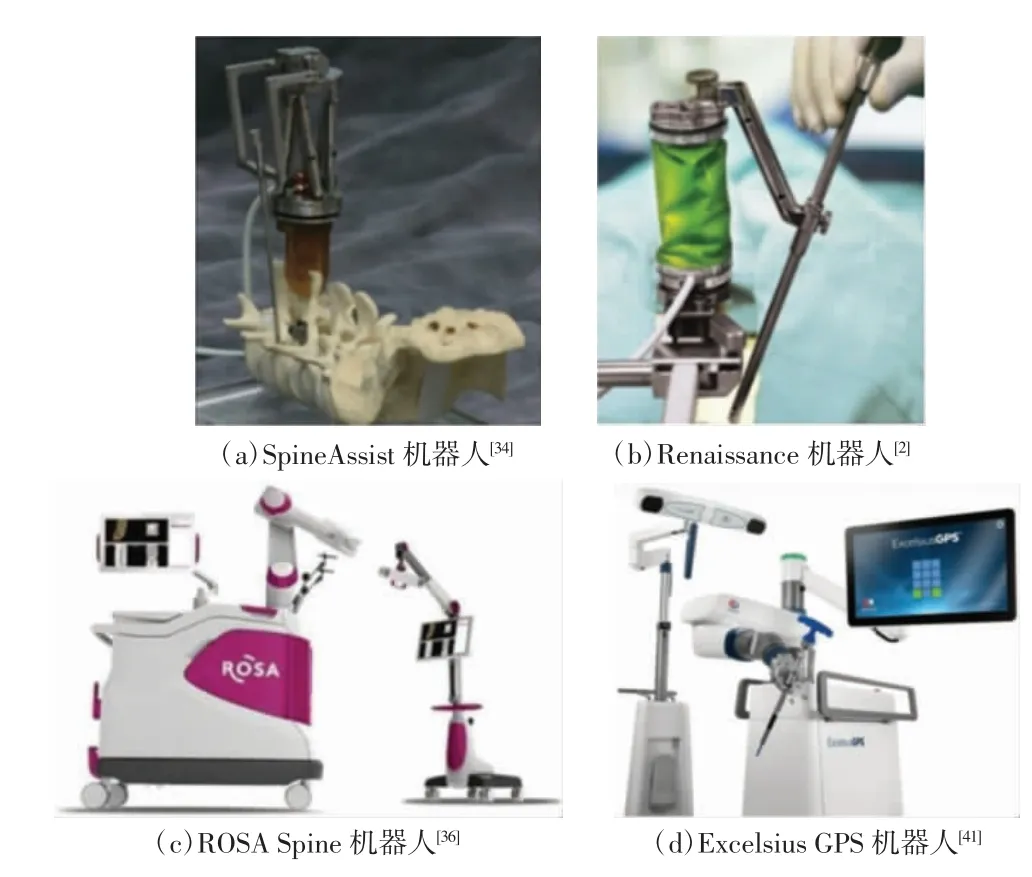
图3 国外脊柱外科手术机器人
2016 年,欧盟CE 和美国FDA 通过了Zimmer Biomet 公司的ROSA Spine 机器人[如图3(c)所示]的认证,其由一个立体导航摄像头和一个机械臂组成[36]。其中机械臂为六自由度串联机器人,并且末端装有力反馈装置,可识别不同的力学信号,与医师进行柔顺交互并辅助进行手术[36-37]。立体导航摄像头用于跟踪机械臂末端和患者脊柱上固定的红外靶点,并进行呼吸补偿和空间定位,以适应患者的呼吸运动和位置变化。实验研究表明,使用ROSA Spine机器人进行脊柱手术是安全可靠的,且精度优于传统手术操作[38-39]。
2017 年,Globus Medical 公司的Excelsius GPS机器人[如图3(d)所示]获得FDA 批准上市,其采用串联的机器人结构,能够实现椎弓钉植入导航操作,可以在术中实时生成图像,主动补偿患者在术中的位置移动[40-41]。2019 年,Huntsman 等[41]采用该机器人对55 例患者进行单位置外侧腰椎椎间融合(singleposition lateral lumbar interbody fusion,SP-LLIF)手术,共置钉328 枚,准确率达到98%,且无相关并发症。2022 年,GlobusMedical 公司最新发布了Excelsius3D,其是一种智能的术中三合一成像平台,是Excelsius生态系统的最新产品,专为2D 透视、2D 数字放射照相和3D 成像而设计[42]。Excelsius GPS 机器人可以和Excelsius3D 相结合,为术中图像引导机器人导航提供解决方案,大大提高了植入物放置精度,降低了辐射暴露并缩短了手术时间[43]。2022 年5 月,Excelsius GPS 机器人与Excelsius3D 相结合,完成了首次Excelsius3D 三合一成像脊柱手术[44]。
脊柱外科领域除上述成熟的机器人外,还有正处于研发和改善阶段的机器人,如:韩国汉阳大学的SPINEBOT 脊柱机器人,该机器人将图像信息和机器人相融合,用来确保该机器人的定位精度和呼吸补偿能力,在对脊柱标本的测试中其系统误差小于2 mm[45-46]。德国慕尼黑Brainlab 公司的Cirq 机器人,与其他大多数脊柱领域的机器人不同的是其采用的是七自由度轻便型机械臂平台,可适应不同的手术场所,具有很高的灵活性和环境适应性。德国宇航中心的Vector-Bot 脊柱机器人,其由轻型机械臂和图像导航系统组成,其中,机械臂的每个关节都配备了力传感器,用来实现机械臂的阻抗控制;图像导航系统则主要用于术中手术器械的定位和姿势误差补偿,用来确保最终的操作精度[47]。虽然该机器人具备临床条件,但还需要进一步的实验验证。
国内的脊柱外科手术机器人起步较晚。2008年,鞠浩等[48]研发出通过CT 来进行引导的五自由度脊柱手术机器人,但缺少力反馈。
2010 年,陆军军医大学和沈阳自动化研究所研制了脊柱微创手术机器人,其由医生控制台、视觉监视系统、手术机械臂和机械臂基座4 个部分组成,其机械臂末端安装六维力/力矩传感器,可实时反馈机械臂受力/力矩情况。在对牛脊骨实施打孔操作中,其偏差在2 mm 以内,植入成功率达99.5%[49]。
2012 年,中科院深圳技术研究所研制了脊柱手术机器人RSSS,其由手术导航系统、光学跟踪系统和手术规划系统及一个配备了六维力传感器的机械臂组成,主要使用图像信息和强迫信号来感知操作状态,主要用于脊柱钻钉的辅助导航[50]。在对猪椎体的磨削实验中,该机器人的定位精度达1 mm,距离分辨力高达0.125 mm[40]。
2016 年,TiRobot 骨科手术机器人(又名“天玑”)[如图4(a)所示]完成注册并上市,可用于脊柱全长、四肢骨折、骨盆骨折等多种手术[51-52]。该机器人由六自由度串联机械臂、光学定位跟踪系统和可实时导航及监控工作的主控工作台3 个部分组成。其中主控工作台可辅助医生完成整个手术规划,机械臂可完成手术导针把持、手术路径定位等功能。该机器人还具有主动定位和人机协同运动功能,可通过医生拖动的粗定位和系统主动定位的精确定位实现安全准确的手术定位。2019 年,积水潭医院的Tian 等[52]在5G 网络环境下遥控“天玑”机器人,成功为12 例患者置入椎弓钉62 枚(置钉A 级59 例,B 级3 例)。2022年9 月“天玑”系列骨科机器人手术数量突破30000例,临床应用覆盖近30 个省份,150 余家医疗机构[53]。

图4 国内脊柱外科手术机器人
2021 年,南方医科大学与鑫君特公司联合研发了半自动脊柱外科专用手术机器人Orthobot[如图4(b)所示],由医生工作站、坐标定位板和手术操作臂(六关节机械臂、智能骨钻、双目识别摄像头)3 个部分组成[54]。其中医生工作站可进行术前规划、图像获取和配准、机械臂运动计算和监督控制。该机器人利用术前CT 影像与术中X 射线二维图像进行配准融合和三维重建,再利用其自主研发的导航跟踪技术自主规划置入克氏针和辅助腰椎弓根螺钉的置入。与其他国内脊柱机器人不同的是,其可以在医师的监督下实现半自动化,在整个手术过程中,医师主要起到监督的作用,以应对突发情况的发生。临床实验研究表明,该机器人螺钉置入位置优秀率(A 级)达90.6%,临床可接受率(A 级与B 级)达100%[55-56]。
2022 年,FDA 批准了台湾省Point Robotics 公司研发的名为Kinguide 的半主动型脊柱手术骨科机器人[如图4(c)所示],该机器人嵌入了高精度和独特的手持末端执行器,可帮助外科医生比以往更有效地钻孔和植入螺钉[57]。
国内外脊柱骨科手术机器人的研究比较成熟,大批研究机构和公司已经有了20 多年的积淀,涌现了一批批各有特色的机器人。但是目前临床上现有的脊柱外科手术机器人在使用便捷性、环境兼容性等方面仍有优化空间。
1.3 创伤骨科手术机器人
创伤骨科主要以各种骨折治疗为主。创伤骨科手术机器人目前仍处于初步、摸索、探讨和试验阶段,距在临床的广泛使用推广还有很长的路需要走。
创伤骨科领域的机器人国外研究较早。1994年,Taylor 利用Stewart 平台原理设计出泰勒空间支架(Taylor spatial frame,TSF),这是一种六自由度的骨科矫正支架机器人[58]。
2000 年,英国拉夫堡大学的Browbank 等[59]采用2D X 射线片导航股骨干骨折复位手术,其将机械控制技术、计算机技术和创伤骨科骨折治疗方法相结合,设计了专用于骨折复位的机械手和机器人视觉系统,但只分析了骨折复位的基本流程,并无真正的实验研究,也未见进一步的实验报道。
2004 年,Seide 等[60]以Stewart 和TSF 为基础,设计出六轴自动固定器来进行畸形和骨折复位操作。该机器人在Stewart 平台上安装了控制部件及载荷感应装置,医师可以通过用户操作模块输入目标动作,系统控制固定架来进行骨折复位操作。同年,Füchtmeier 等[61]基于Stäubli RX 130 工业机器人(串联式)研发了RepoRobo 骨折复位机器人[如图5(a)所示][62],其有6 个自由度,最大可以承受240 N 的负载,通过机器人末端抓持器与骨折远端固定架形成稳定连接,实现牵拉和复位操作。该机器人机械臂末端配有六维力/力矩传感器,用于采集手术过程中的力学信息给医师参考,以防止医疗事故的发生,其复位效果依然取决于医师的经验性判断。
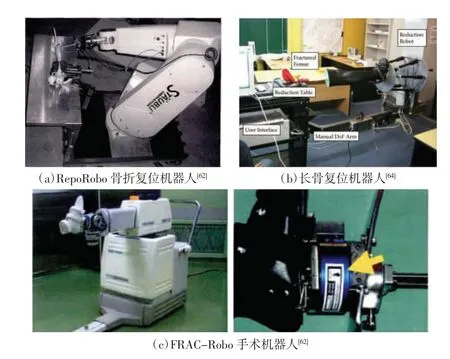
图5 国外创伤骨科手术机器人
2006 年,Graham 等[63]研制出一款六自由度并联骨折复位机器人,其通过动/静平台、霍尔传感器配合骨骼3D 模型来完成骨折复位。
2008 年,Graham 等[64]研发出采用六自由度的长骨复位机器人[如图5(b)所示],通过足套将患侧足部固定来进行复位,但该机器人和患者骨骼之间缺乏刚性连接。同年,日本大阪大学和东京大学联合开发了六自由度串联型骨折复位手术机器人FRACRobo[如图5(c)所示][62],该机器人可提供平移、旋转和牵引操作,通过机器人和足靴固定患者足部,辅助医生间接完成股骨干骨折复位[65]。但术中患者骨折近端位置并不能实现完全固定,在复位的过程中肌肉和软组织会发生一定的旋转和牵拉,不能精准地控制骨折两端的相对运动,导致复位效果受医师经验影响较大。
2016 年,Dagnino 等[66]研制并开发了基于Stewart平台的串联型关节骨折复位机器人,该机器人大大减少了对患者软组织及神经血管的损伤,但负载小限制了其实用性。
2017 年,Abedinnasab 等[67]研制并开发了长骨干骨折复位机器人,该机器人为三支链开环六自由度机器人,其驱动电动机安装在定平台上,使得其动平台移动十分轻便。
国内在创伤骨科领域的手术机器人发展同国外一样,仍多限于试验阶段。2002 年,哈尔滨工业大学研制出基于Stewart 平台的正骨机器人[如图6(a)所示][58],综合考虑了机器人运动学逆解、奇异性和空间干涉等问题,创新地提出虚拟建模和医学图像导航相结合的方式来指导骨折复位操作,在进行手术的过程中,医师只需要将该机器人放置到患者断骨两端,为医师提供了很大的便利[68]。对模型骨的实验研究初步验证了该机器人的有效性[69]。
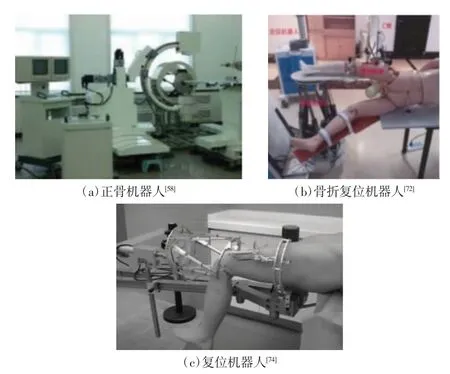
图6 国内创伤骨科手术机器人
2009 年,香港大学的Ye 等[70-71]借鉴了串联机器人和并联机器人各自的优点,研制出六自由度串并联型骨折复位机器人系统,其由牵引机构和断端复位机构两部分组成,可实现骨折端的空间旋转与位移,其中牵引机构主要用于承载骨折复位过程中肌肉的收缩力,骨折复位工作则由断端复位机构来完成。术中,骨折近端固定,远端与复位机构相连接,牵引机构同患者足部相连接,以执行牵引完成骨折复位。
2012 年,解放军总医院研制出基于Steward-Gought 平台的新型骨折复位机器人[如图6(b)所示],该机器人术前扫描患者双侧股骨CT 数据,以健侧作为患侧骨折部位的复位标准,同时该机器人引入一种特殊的间接定位结构,用来提高系统的重复定位精度[72]。同时,该机器人还融入了视觉伺服控制对术中复位过程进行实时检测和反馈,来保证患者手术过程的安全。动物骨实验结果显示,该机器人具有较高的复位精度。
2013 年,积水潭医院的Wang 等[73]将Steward 平台和牵引床相结合研制出一种复位机器人[如图6(c)所示],该机器人主要由一个2/3 圆环动平台、一个圆环静平台和一个牵引床组成,其中动平台和静平台通过6 个驱动器连接[74]。在手术过程中,机器人固定于牵引床上,患者膝关节弯曲平躺在牵引床上,机器人采用X 射线图像进行导航,以患者健康的一侧股骨作为手术复位的参考侧,进而驱动平台运动,来实现断骨复位。
2015 年,北京市工程实验室的韩巍等[75]研制了用于长骨骨折的并联型主从式手术机器人,该机器人作为系统从手和手术床固定连接,从手两端与骨折断端固定连接,医生操作主手实现术中骨折复位。利用统计学方法对该机器人的复位精度、操作次数进行单因素方差分析,证实了该机器人的性能良好。
2021 年,全球首个智能化骨折复位机器人由罗森博特科技公司推出,积水潭医院用其完成了世界上首个智能骨折复位机器人的临床试验[76]。22 例临床试验中,盆骨闭合复位优良率高达95%,闭合复位成功率高达100%,远高于传统医师的操作。
虽然创伤骨科手术机器人研究开展较早,但是由于创伤骨科手术分型的多样性,导致手术需求的复杂性,大多数创伤骨科手术机器人仍停留在实验设计和尸体骨层面,技术成熟度和市场化也相对关节、脊柱骨科手术机器人有较大差距。
2 骨科手术机器人存在的问题及展望
与传统手术相比,采用骨科手术机器人手术具有以下优点:(1)精确度和准确度高[73]。相对传统骨科手术,骨科手术机器人具有更好的精确度和准确度。以脊柱手术为例,相关实验数据表明,螺钉通过骨科手术机器人置入,误差超过2 mm 的概率只有1.7%左右[40]。(2)并发症发生率低。采用骨科手术机器人手术术中发生神经损伤和术后功能紊乱、术区感染等相关并发症的概率相对于传统医师操作的手术大大降低。(3)手术稳定性好。骨科手术时间长、手术复杂烦琐,机器人不存在因手术时间过长产生疲劳问题,具有很好的稳定性。(4)术后恢复快。骨科手术机器人手术切口小、患者失血量较少、对患者损伤小,可使患者较快恢复。
尽管相较于传统骨科手术,骨科手术机器人有着众多优势,但依然存在以下不足:(1)体积庞大[77],调试和安装麻烦。(2)成本昂贵。系统技术复杂、专利问题和需要定期维护等原因导致骨科手术机器人成本昂贵,基层医院无法负担,普及率较低。(3)用途单一。多数骨科手术机器人只服务于特定类型骨科手术,功能较单一。(4)缺少感觉反馈系统。骨科手术机器人术中触觉、韧性、温度等反馈的缺失,容易出现医源性损伤。(5)无法完成复杂手术操作,智能化程度低。骨科手术机器人发展几十年也无法像胸腹腔镜手术机器人获得广泛关注的原因之一就是其智能化程度低,对于复杂的手术操作(如关节置换后的翻修等)依然依靠手术医生来实现。未来骨科机器人可以从以下几点进行发展和突破:
(1)多功能化。
目前每款骨科手术机器人只服务于特定类型的骨科手术,功能比较单一,因此未来骨科机器人应向多功能化方向发展,以适应更多种类的骨科手术。
(2)普及化。
与传统手术相比,骨科手术机器人价格昂贵,手术成本较高,一般家庭难以承受如此高昂的手术费用。为了让更多骨科疾病患者享受到更好的医疗资源,骨科手术机器人普及化也是未来发展的一个很重要的方向。
(3)远程化。
近年来,随着5G 技术的快速发展,远程手术在技术上已经不是问题。同时,政府和医疗机构为了缓解各地经济发展不平衡导致的医疗水平和资源的差异,为偏远地区提供高质量的诊疗服务,也在大力推动相关产业的发展。因此,骨科手术机器人应和5G技术紧密结合,扩展远程手术的发展方向。
(4)精准和微创化。
在医学手术领域,更加精准、微创的操作意味着更小的手术切口、更小的创伤、更少的术后并发症[78],易于患者更快恢复。虽然相对传统的骨科手术,骨科手术机器人精度更高,但是对微创手术来说,其精度依然有待提高。未来更加精准和微创的操作依然是骨科手术机器人的主要发展方向。
(5)智能化和人机交互全面化。
随着人工智能的快速发展,机器学习、深度学习、大数据和自然语言模型在骨科手术机器人中广泛应用[79],未来骨科手术机器人高度智能化将势不可挡,主要体现在机器人的智能化规划导航、自主决策能力和人机交互能力。例如,术前机器人可以根据患者的医学影像数据和手术需求进行智能化的手术规划,术中机器人可根据患者病情、手术部位和手术器械等信息进行智能化决策,调整手术方案。同时,随着自然语言处理技术的发展,未来骨科手术机器人将具有更加智能化的交互技术,可以与患者和医师进行更加自然和人性化的交互操作。
3 结语
从1992 年全球第一个骨科机器人Robodoc 诞生到现在各类骨科手术机器人百花齐放,其凭借微创、精准、安全和智能等特性,有力地改善了传统骨科手术中假体位置安装偏差大、术中辐射量高、手术对患者造成损伤、操作精度差和手术效果对医师经验依赖性高等不足,但是依然存在机器人体积庞大、用途单一、手术成本昂贵、智能化程度不足、精准性和微创性有待提高等各种问题。因此,提高骨科手术机器人的稳定性和精度、智能化程度及普及率,改善人机交互体验是未来骨科手术机器人的主要发展方向。
猜你喜欢
中老年保健(2022年7期)2022-09-20
今日农业(2021年20期)2021-11-26
保健医苑(2021年7期)2021-08-13
国际放射医学核医学杂志(2021年10期)2021-02-28
基层中医药(2020年12期)2020-07-22
中国生殖健康(2019年2期)2019-08-23
运动精品(2017年3期)2018-01-31
医学教育管理(2015年3期)2015-12-01
实用手外科杂志(2015年4期)2015-08-27
中国中医药现代远程教育(2014年14期)2014-03-01