基于5G 无人机的电力输电线路自动巡线
2023-08-14 02:21刘喜军
通信电源技术 2023年10期
刘喜军
(胜利油田电力分公司调度中心,山东 东营 257000)
0 引 言
近几年,很多电力企业将无人机应用在电力输电线路巡检,但目前大多采用的是人工操控和无人机相结合的方式,自动化水平不高,随着通信技术、5G 技术、数字技术、无人机技术等技术的快速发展,很多专家和学者尝试将5G 技术和无人机技术结合起来,以实现无人机自动巡检电力输电线路[1,2]。
1 基于5G 和无人机的通信技术路线
1.1 总体设计
通过对电力输电线路自动巡检工作整体进行梳理,对基于5G 和无人机的通信系统进行了设计,主要组成部分是通信指挥中心、地面方舱及5G 空中通信网。基于5G 无人机空中通信网,利用无人机搭载任务载荷进行组网通信[3]。无人机载荷的主要组成部分是能量供应管理模块、组网模块以及5G通信模块,具体的体系结构如图1 所示。
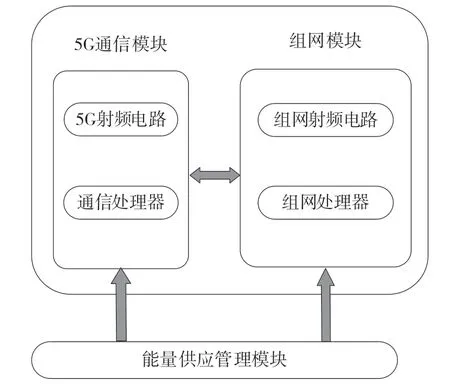
图1 无人机载荷体系架构
其中,5G 通信模块利用定向天线覆盖技术和全双工双向中继技术来实现5G 信号的全面覆盖;组网模块使用全向天线技术组建无人机之间的链路并完成智能组网,主要实现飞控和组网的功能;能量供应管理模块主要用于供电。另外,组网模块还实现了飞行控制及智能部署等功能。
地面方舱主要包含5G核心网络设备和5G宏基站,利用光纤将5G 宏基站的回程信号传递给5G 核心网络设备;利用光缆实现5G 核心网设备与附近固定通信公网站台之间的相互通信,从而保持无人机和指挥中心之间的双向通信。相关管理人员可通过浏览器/服务器模式来访问5G 网管服务平台,填写正确的管理员账号和密码后,即可成功登录5G 网管服务平台。在该平台,查看无人机自动巡检电力输电线路的执行情况,通过对无人机采集信息的分析及处理,发现需要检修的位置并安排相关检修人员及时检修。
1.2 无人机任务载荷设计
1.2.1 通信模块
通信模块的主要组成部分有通信处理器和5G 射频电路,将搭载5G 通信模块的无人机作为通信汇聚节点,5G 射频信号直接连在天线上,作用是收发并处理物理层的5G 射频信号;通信处理器主要用来处理5G 基带信号。其中,该模块的主频率是3.5 GHz,应用定向天线和全双工双向中继技术,结合放大转发中继策略,实现5G 信号的全面覆盖[4]。
其具体的工作流程如下:相同子区域内的相邻使用者可直接通过端到端完成信息通信;如果相同子区域内相邻使用者不能直接进行通信,则可利用相同5G 通信模块完成信息交互;处于不同子区域的使用者,用户信号经过源节点5G 信号模块,后经通信处理器进行一定转换,得到相应的基带信号。通过组网模块的分析和处理,经过一定的网络路由后到达目的节点的5G 通信模块,该通信模块需要将此信号依照相关协议重组后下发给目标用户终端,从而完成信息交互。与此同时,终端和指挥中心的通信流程为5G 模块识别用户信号,通信处理器将该用户信号转换成基带信号,用户信号再经过组网模块的相应处理后被送入5G 网络进行传输,经过通信汇聚节点到达指挥中心;反之,信息依次经汇聚节点、组网模块传递到目标5G 通信模块,依照相关协议重组后到达用户终端。
1.2.2 组网模块
组网模块的主要组成部分是组网处理器和组网射频电路。组网射频电路主要收发和处理物理层的组网射频信号;组网处理器主要用于飞控运行和组网以及处理飞控和组网信号。组网模块主要有2 个方面的作用:(1)完成中继信息的协议转换,实现信息的互联互通;(2)对飞控指令信息实现协议转换,建立相关控制链路以实现无人机控制平台和无人机之间的互联互通[5]。另外,还可利用人工控制和预编程结合的方式来控制与智能部署无人机,以使无人机自动完成电力输电线路巡检任务。该模块的主工作频率为5.8 GHz,主要结合使用自适应路由协议、改进的MAVLink 协议和全向天线技术等,实现基于5G 的无人机通信组网和电力输电线路自动巡线。
1.2.3 能量管理模块
能量管理模块的主要组成部分有休眠唤醒系统和供电系统,为载荷模块提供能量,能源不足时可自动发起充电请求并发出报警。另外,该模块增加了休眠唤醒功能,减小功耗增长时间[6]。通常,通信模块的工作功率低于3 W,组网模块的工作功率低于2 W,整个无人机载荷功率小于5 W,供电系统可维持无人机载荷巡检6 h 以上。
1.3 无人机组网数量估计
无人机组网属于自由空间传播的一种,指的是上空大气层相同且均匀媒质传播,在这种传播方式中,信号损耗主要受电波频率影响。经过相关分析和计算,最后得出区域和通信汇聚节点数量的关系为:在Mkm×Mkm 的区域中,为达到5G 信号的全面覆盖,至少有个。
2 自动巡检控制技术
自动巡检控制技术的主要原理是对通过全球定位系统(Global Positioning System,GPS)、气压计获得的原始数据进行分析和处理,经过滤波融合后来判断无人机的位置,从而实现无人机自动飞行巡检电力输电线路的任务。目前,利用无人机巡检仍然需要相关巡检人员的操纵,无人机自动化程度不高,因此本文提出一种自动巡检控制思路。
2.1 串级位置PID 控制器
无人机自动飞行过程中主要的控制参数有垂直位置、水平位置、飞行速度以及加速度等,串级PID控制器具体的结构示意如图2 所示[7]。
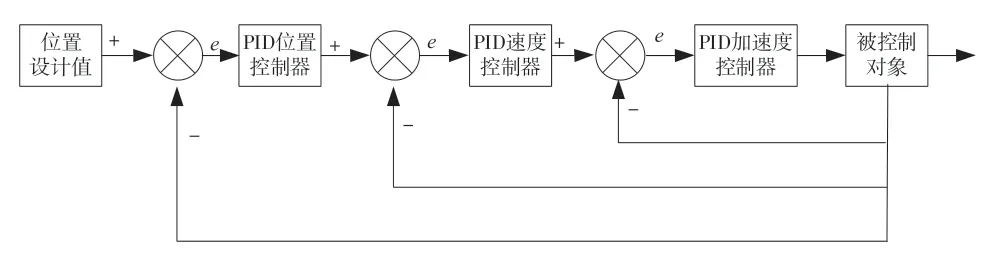
图2 串级PID 控制器结构
该控制器同时完成无人机的加速度、位置和速度的闭环控制,根据飞行中的加速度,计算出相应速度,再结合相应位置信息,向加速度环、速度环和位置环提供对应的信号值。和单级位置控制器不同的是,在该3 级闭环控制器中,速度环的设定值来自位置环的输出,加速度环的设定值来自速度环的输出,这种设计方式可以很大程度上提高无人机输电线路巡检时的抗干扰能力。
2.2 自动起飞设计
利用串级PID 位置控制器可以读取无人机的加速度、速度和垂直高度,从而实现对无人机的控制。卡尔曼滤波后初始值取高度环的反馈值和设定值,将高度环的输出值作为速度环的输入值,再结合加速度的值经导航系统运算器计算出反馈值,将速度环的输出值作为加速度环的输入值。无人机自动抵达设定位置,需要自动调整自身的加速度、垂直位置及速度,这是由飞行控制器输出值调整控制电机旋转来实现的。无人机在垂直方向移动后,借助惯性导航元件和气压计的相关高度值来计算高度。以往无人机自动巡检起飞前的操作相对复杂,本文通过一定改进和优化,提高了无人机自动化程度,使操作复杂性大大降低。
2.3 航线飞行规划
无人机在自动起飞后,经过一定航线达到目标位置,该航线是由相关人员预先设计好并上传到无人机系统中[8]。无人机自动飞行流程如下:将自身系统中的杆塔坐标航线进行加载,按照航线中杆塔坐标依次完成输电线路巡检任务,并记录相关数据。检测数据精度及卫星数量,当GPS 数据满足要求时,无人机从飞行模式换成自动巡检模式。其中,无人机自动飞行规划流程如图3 所示。
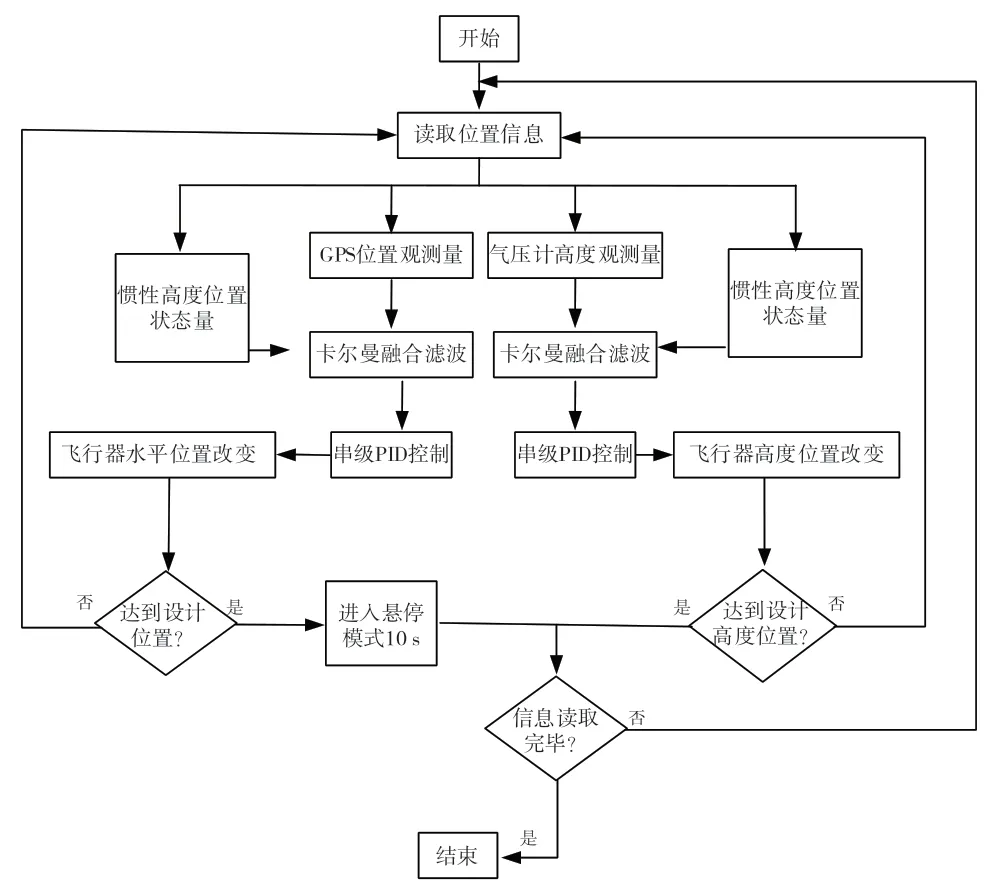
图3 无人机航线规划流程
2.4 自动返航降落设计
无人机在整个巡检过程中,都会对相关数据进行保存,同样会保持起飞前的GPS 数据,无人机返航和降落前先控制高度,设置返航高度为10 m,到达该高度后对无人机水平位置进行控制,读取起飞前的初始坐标,将其设置为水平位置设定值。对比初始起飞位置和当前水平位置的差距,当差距满足条件时,将当前位置作为返航降落的初始位置,控制垂直高度,实现无人机自动降落返航。无人机下降过程只用到加速度、速度控制的PID 位置控制器。其中,下降速度是速度环控制器的数值,且该值又是加速度反馈值。速度环的输出值使用加速度环的设定值。无人机着陆状态要检测加速度和速度的反馈值,当这2个反馈值都是0时,表示无人机已经自动固定在机巢上。
3 应用成效
基于5G无人机进行电力输电线路自动巡线测试,发现无人机可在较复杂的电力设备环境中可靠飞行,是一种安全、高效且智能的巡检工具。无人机巡检一个有172 座铁塔、半径在3.5 km 区域内的电力输电线路,单次飞行时间大概是35 min,对于大型铁塔的全面巡检仅需要10 min 左右,且是在无人操作的情况下,极大解放了生产力,降低成本的同时提高了电力输电线路的巡检效率。无人机自动巡检和以往人工巡检相比的另一个优势是,无人机具有较强的环境适应能力,可以到达很多人力不方便或不可达的区域,加上装置的高清摄像头,可以拍摄大量高清电力设备的图片,用以发现安全隐患或是为今后维护提供依据。综上所述,基于5G 无人机在电力输电线路的自动巡线有效降低了人力、物力和时间成本,提高了电力输电线路巡检的质量和效率,让电力输电线路的“自动巡检和无人值守”成为可能。
4 结 论
经实验表明,基于5G 无人机在电力输电线路自动巡线大大提高了输电线路巡检的质量和效率,且巡检过程安全高效,在一定程度上,5G 无人机实现了电力输电线路自动巡线。另外,5G 无人机还可以装载很多模块,从而实现更多的功能,对此需要相关的专家和研究人员加大这方面的研究,期待更多的先进技术在电力行业广泛应用,促进电力向更智能、更好、更快的方向发展。
猜你喜欢
当代水产(2022年6期)2022-06-29
中国电业与能源(2021年4期)2021-05-22
广西电业(2020年11期)2020-03-23
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
无人机(2018年1期)2018-07-05
电测与仪表(2015年3期)2015-04-09
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28