
BP神经网络在测控设备自动调平系统中的应用
2023-08-11 07:16:30薛缠明赵翔宇
现代计算机 2023年11期
薛缠明,赵翔宇
(太原卫星发射中心,太原 036301)
0 引言
随着Ka 频段车载测控设备在航天领域的快速发展,技术部门对设备测量数据的精度要求越来越高,车载测控设备都配置了电子水平传感器自动调平系统[1]。此前测控设备都是利用电子水平传感器反馈的水平误差信号,在跟踪目标前进行一次调平,来保证设备的测量精度。但在跟踪过程中由于设备自身重心的变化使得设备水平度在一定范围内变化,导致设备测量数据的精度较低。尤其是Ka 频段设备天线波束较窄,跟踪精度高,天线水平度的较小变化,都会导致测量的外测俯仰角度有一定误差。鉴于BP 神经网络具有非线性的预测特点,而且在预测方面具有高时效和高精度的能力[2],针对上述出现的问题,本文提出以BP 神经网络为基础,在天线跟踪目标过程中利用电子水平传感器反馈的信号实时预测补偿误差,动态进行补偿,进一步有效减小重心变化导致的测量误差。
1 电子水平传感器自动调平系统简介
电子水平传感器自动调平系统如图1 所示,电子水平传感器安装在天线底座中心位置,自动检测底座水平度,利用PID 控制原理控制设备四个支撑腿的电机进行调平。为了保证测量的俯仰角等外测数据在要求的误差范围内,目前设备不能进行跟踪过程的动态调平计算补偿误差,只能在跟踪目标前将天线俯仰角固定在45°,方位角从0°~360°每30°进行一次调平,并将所得的12 组数据取平均值得到补偿误差。最后天线在跟踪目标过程中将测量的俯仰角和补偿误差值送到中心进行处理分析。

图1 自动调平系统
2 BP神经网络算法预测
目前在数据预测中BP 神经网络算法凭借它非线性映射能力、泛化能力和时效性强等特点,已经成为数据预测的重要工具。BP 神经网络是由多个神经元组成的广泛互连的神经网络模型,并通过数据样本对神经网络模型的训练,使其具有完成各种数据处理和非线性转化的能力。对于任意一组随机的、正态的数据,都可以利用BP 神经网络进行统计分析,做出拟合和预测。在利用BP 神经网络算法对数据进行预测的过程中,为提高预测数据的精度,模型的建立和训练成为关键环节。为此,提出一种以BP 神经网络算法为基础预测补偿误差的方法,其可分为三个步骤。
(1)BP 神经网络建模。BP 神经网络的模型结构主要由输入层、隐藏层和输出层组成,层之间采用全连接方式,层内无连接[3]。这样的神经网络模型通过反向传播算法来求解,中间隐藏层的主要作用是更好地对数据进行表示以及提高函数的拟合能力。
(2)模型训练。网络模型的训练一般采用反向传播法,在反向传播过程中主要是采用梯度下降公式进行有效的反向迭代,根据预测值与实际值的偏差量,改变参数矩阵,以达到更好的训练效果。
(3)补偿误差数据预测。BP 神经网络模型建立和训练后,对实时补偿误差数据进行预测。通过实际验证,预测的补偿误差可以有效地提高测量精度。
2.1 BP神经网络建模
在Ka 频段车载测控设备实时跟踪目标过程中,由于时效性强,要求电子水平传感器自动调平系统建立的BP 神经网络模型能够快速预测出补偿误差,确保测量的精度。通常BP 神经网络的模型如图2所示,由输入层、隐藏层和输出层组成。
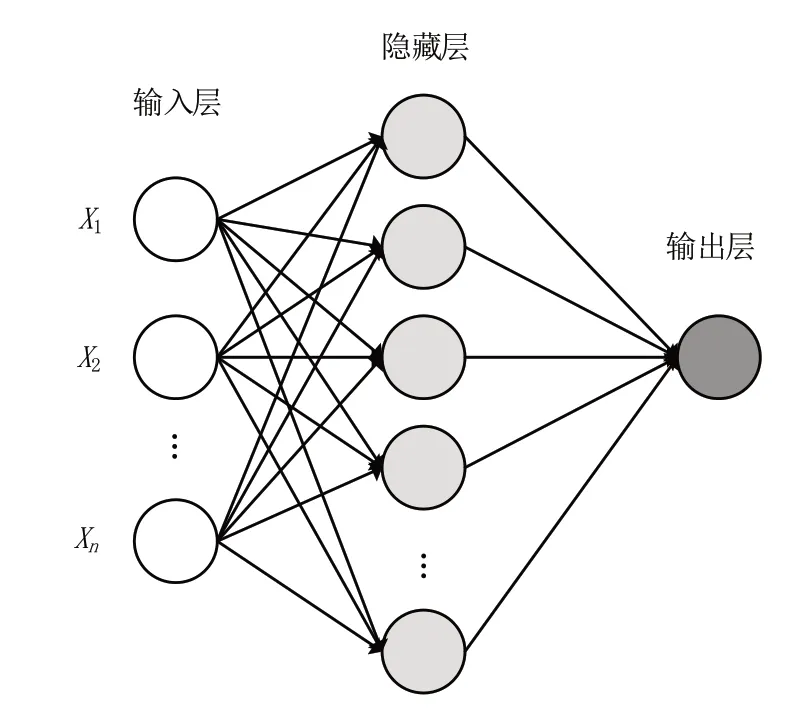
图2 BP神经网络模型
其中隐藏层各神经元的BP结构如图3所示,其基本的单元公式为
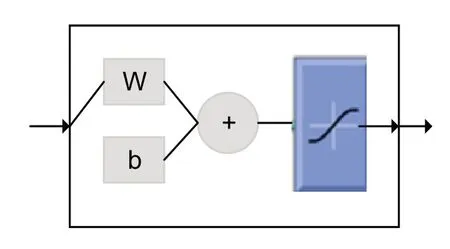
图3 隐藏层各神经元BP结构
式中:x为输入值,g 为激活函数,w为权重,b为偏置,n为隐藏神经元个数,o为输出值,引入偏置b的原因在于让其模型适用于更多情况。各层之间的工作流程为:从输入端开始,沿着箭头指向乘以相关权重系数后加和(还需加偏置),加和后得到的结果为激活函数的输入,再次计算得到的结果作为此节点的输入,依次计算,直到得到最终的输出。
模型建立时,增加隐藏层可以更好地对数据进行表示和提高函数的拟合能力,在三层的基础上,再引入更多的隐藏层,就变为深度神经网络。但是每增加一层,模型的参数数量急剧增加,对计算机资源的要求增高,在实际使用中,模型训练的时间非常久。针对电子水平传感器自动调平系统神经网络模型的建立,考虑到实时性以及计算机资源的限制,所以本系统选择只有一层隐藏层的BP神经网络模型。
2.2 模型训练
BP 神经网络模型训练的过程,包括正向传播和反向传播[4]。其中正向传播是把样本从输入层输入,经过隐藏层处理后,从输出层输出。这样得到的实际值没有达到期望值后,就可以采用反向传播。反向传播是将预测值与实际值的偏差量以某种形式通过隐藏层向输入层逐层反传,并将误差分摊给所有神经元,获得各层的误差信号,用它们可以对各层的神经元的权值进行调整,循环不断地利用输入输出样本集进行权值调整,以使所有输入样本的输出误差都减小到满意的精度。
在反向传播中核心问题是如何度量预测值与实际值的误差,传统的度量方法是采用预测值与实际值的均方误差。本系统在度量中采用梯度下降方法[5],对每个权重做偏导,乘以学习率η,公式为
式中:ypre为预测值,ytru为实际值,η为学习率。
2.3 补偿误差数据预测
为验证模型,采用某Ka 频段车载测控设备跟踪无人机定点调平的数据集进行验证。数据集采集了电子水平传感器在设备模拟跟踪无人机不同运行轨迹下的几组补偿误差数据,每组采集了12 个定点的数据,通过多次模拟跟踪定点数据采集,得到数据样本,截取一种运动轨迹下部分样本数据如表1所示。

表1 电子水平传感器定点采集的原始数据
将上述不同定点采集的数据作为训练数据,通过模型学习训练后,得到预测的补偿误差和真实补偿误差情况如图4所示。
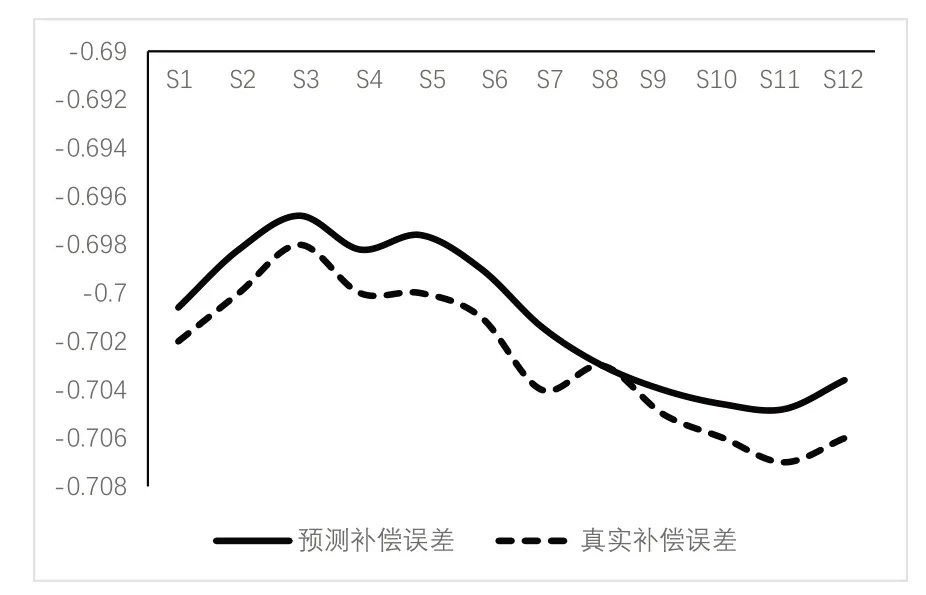
图4 补偿误差对比情况
最后通过训练后的模型模拟跟踪无人机,实时将电子水平传感器反馈的信号作为输入,进行动态预测补偿误差比较。通过动态补偿误差测量的俯仰角数据比跟踪前补偿固定误差测量的俯仰角数据精度更接近于真实值,极大地提高了设备的精度。
3 结语
本文将BP 神经网络算法应用到Ka 频段车载测控设备自动调平系统中,经过实际试验使用,对天线跟踪过程中重心变化导致的补偿误差实时预测补偿。结果表明,BP 神经网络算法可以高效精确地预测补偿误差,提高了设备的测量精度。
猜你喜欢
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
电子制作(2019年19期)2019-11-23 08:42:00
山东冶金(2019年5期)2019-11-16 09:09:38
森林工程(2018年4期)2018-08-04 03:23:38
航天工业管理(2017年4期)2017-05-12 01:16:35
人生十六七(2016年14期)2016-12-01 05:24:26
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
现代农业(2015年1期)2015-02-28 18:40:09
