
用于发动机试验现场的推力测量传感器长期稳定性监测系统
2023-08-10 01:02郭健鑫王得志张雪飞
航天制造技术 2023年3期
郑 科 郭健鑫 朱 旺 王得志 张雪飞 刘 硕
用于发动机试验现场的推力测量传感器长期稳定性监测系统
郑 科 郭健鑫 朱 旺 王得志 张雪飞 刘 硕
(北京航天试验技术研究所,北京 100074)
发动机高空模拟试验前需要进行推力校准,目的是确定传感器静态特性指标,如线性度、滞后性以及重复性等,关键工作是通过试验的方法来建立输入量和输出量之间的输入-输出实际特性曲线。推力校准中使用的标准传感器有效期为一年,实际使用中传感器存在长期稳定性不佳或突然损坏的现象,但在试验前准备阶段唯一不能确定问题的就是标准传感器,因此,有必要对推力测量进行长期稳定性监测,完善推力校准操作规程,通过研制一套覆盖常用量程的推力传感器比对装置,在推力架或者某个标准传感器长时间没使用时,试验前对标准传感器进行标定,与证书各项指标进行比对,经试验测试实现了对推力传感器的快速校验,时间24min,误差在千分之一内,满足了试验现场对传感器的任务要求。
推力测量;火箭发动机试验;传感器;推力校准
1 引言
发动机常被用于卫星、火箭等的精确轨道控制和姿态调整,姿轨控发动机推力矢量直接关系到卫星能否入轨以及发射任务的成败,准确测出推力矢量参数,能够为发动机的在轨工作状态提供基本依据[1,2]。
目前推力矢量测量有多种方案,但在我国的发动机高空模拟热标定试验中,技术和工艺比较成熟且经多次飞行验证效果显著的是北京航天试验技术研究所投入使用的转台推力矢量测量方法[3,4]和该所总结提炼的基于压电的动态矢量推力测量方法[5~7]。
无论采用何种推力测量方法,推力矢量参数都不是直接测得,而是基于一定的数学模型通过计算间接得出[8]。而计算推力矢量需要通过发动机高空模拟试验测得三向力,测三向力前都需要进行推力校准,目的是确定传感器静态特性指标,如线性度、灵敏度以及重复性等,建立推力测量传感器输入量和输出量之间的输入-输出实际特性曲线[9]。
2 推力校准
传感器在装配完毕后,需要对线性度、重复性、滞后性以及灵敏度等传感器性能指标进行校准试验,以评定传感器性能的优劣。同时由于系统其他因素的影响,不能只对传感器进行校准,需要将配套的测力板、电荷放大器、数据采集卡等一起标定,确定输出及输入关系[10,11]。
对于推力矢量校准装置,推力校准是在试验现场通过实际测量建立推力测量系统输入量和输出量之间的关系,系统包括测力平台、转接架、台架、电荷放大器、数据采集卡以及管路等,如图1所示。
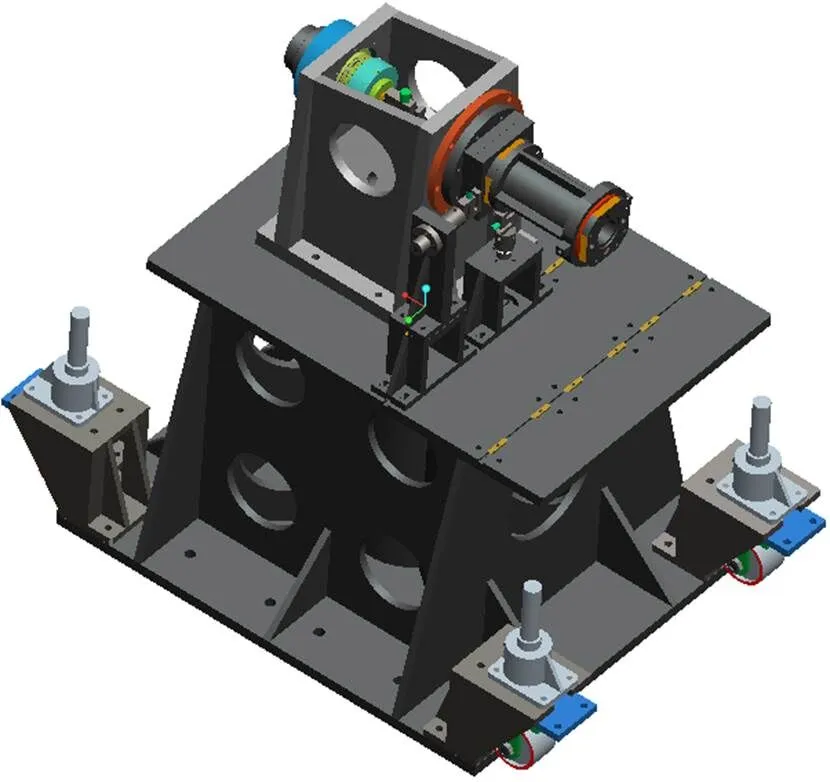
图1 推力矢量校准装置三维结构图[5]
推力校准时,试验员通过液压手动加载系统产生拉力,由连接件传到测力平台上,手动调节油缸,使标准传感器二次仪表的指示值刚好达到标定值,记录此时测力平台中工作传感器的输出,依据标准传感器的检定证书,计算逐级加载的力值,逐级加载完成推力校准。
试验时,依据推力校准得出的输入量与输出量关系,对得到的电压值处理,即得出推力测量值[12]。
3 推力测量传感器稳定性监测必要性
推力测量系统是复杂的机电系统,随着对推力校准精度的要求越来越高,为保证数据的一致性,需要对推力测量系统的状态进行监测。影响推力校准的因素有很多,包括电源的影响、推力架结构本身的影响、有数据采集系统太平洋6000的影响、有标准传感器的影响等等。
对于某次推力校准,发现斜率和以往偏差0.3%,需要分析原因:数据采集系统自身精度高,一般会定期送校;推力架本身结构除去接线不会有大的变化;供电电源以及监测仪表定期校检;排查标准传感器一般为最后一步,除去送校没有自身的手段,但是在检查标准传感器时,已经到了临近试验的日期,如果送到计量所校准则会耽误进度。
推力校准中使用的标准传感器有效期为一年,实际使用中传感器存在长期稳定性不佳或突然损坏的现象,但在试验前准备阶段唯一不能确定问题的就是标准传感器。
推力架标准传感器长期稳定性不佳带来的可靠性问题:
a. 试验前推力校准时发现对工作传感器标定的斜率和之前试验的斜率存在偏差时,就需要在每个传递环节查找问题,花费时间,耽误进度;
b. 在不能确定是标准传感器出现不稳定时,由于时间关系,试验中只能应用推力校准得出的传递关系系数,试验后送检标准传感器,但这会影响试验数据处理进度。
2021年,某型号发动机试验中发现推力偏低3%,标准传感器为半年前送检,试验后经再次送检发现标准传感器已经漂移,试验前推力校准系数有误差。
因此,有必要对推力测量进行长期稳定性监测,完善推力校准操作规程,设计一个对推力传感器进行推力校准的比对装置,通过比对装置,定期或在重大试验前快速确认标准传感器的性能指标,对比证书;同时建立一个数据库,包含不同推力架不同发动机型号推力校准的各项性能指标,方便查阅比对,有效保证试验高质量、高效率的完成,避免非必要的进度耽误。
4 稳定性监控系统设计
4.1 系统组成
推力测量传感器长期稳定性监测系统包括覆盖常用量程推力传感器的比对装置和数字采集系统,其中比对装置包括固定支架、驱动控制器、步进电机、直线模组、滑轨、弹簧、加长螺母、标准传感器、被测传感器以及自适应固定装置,监控系统比对装置流程图如图2所示,比对装置的结构图如图3所示,数字采集系统包括数字采集仪和稳压电源。

图2 监控系统比对装置流程图

图3 监控系统比对装置结构图
1—步进电机;2—精密直线模组;3—加长螺母;4—滑轨;5—加长螺母;6—标准传感器;7—被测传感器;8—自适应固定装置;9—弹簧伸缩部件;10—铝型材固定支架
a. 用于推力测量的传感器的压缩量或伸长量都较小,尤其对于大量程传感器,压缩或伸长单位微米对应的力值的变化量很大,将弹簧和滑轨(包括弹簧支撑轴和套筒)相结合,弹簧伸缩量代替传感器伸缩变形量,即弹簧伸缩毫米级代替传感器伸缩微米级,可以有效提高系统的负载精度。
b. 为了做到传感器的快速校准,首先需要做到传感器的快速安装,不同被测传感器的长度、大小、连接方式都不同,装置为做到快速安装做了如下改进:
为满足0~5000N的量程覆盖,引入矩形弹簧,如图4所示。不同颜色可承受不同最大载荷,但是结构尺寸一致,外径50mm,长度200mm,材质50CRVA,如表1所示,可根据不同量程的传感器选择合适的矩形弹簧。这里每个弹簧的最大载荷取安全系数为0.8,矩形弹簧可覆盖系统所需所有量程,详见表2。

图4 矩形弹簧

表1 矩形弹簧参数表

表2 矩形弹簧选择表
弹簧支撑轴与直线模组电动缸连接,机构设置了直线模组电动缸的初始伸长量170mm,校准前只需要将直线模组的伸长量通过电机收缩170mm,空出余量便可快速安装,模块化管理。
针对传感器连接尺寸的不同,加工了不同尺寸的连接件,做到试验常用传感器校准前的快速安装;针对传感器长度的不同,在机构尾端设计自适应固定机构,可以根据传感器底部的位置确定挡板固定的位置。
4.2 工作原理
在比对装置中,如图5所示,电机转动由直线模组转换为直线运动,直线模组连接滑轨,弹簧套在滑轨上与标准传感器连接,标准传感器通过加长螺母连接被测传感器,达到受力一致的目的。计算机通过驱动控制器控制电机的往复运动,从而控制弹簧的伸缩运动,施加需要加载的力值,数字采集系统记录标准传感器和被测传感器的输出信号,得出被测传感器的输入输出特性曲线,与校准证书比较,验证传感器的稳定性。

图5 监测系统原理图
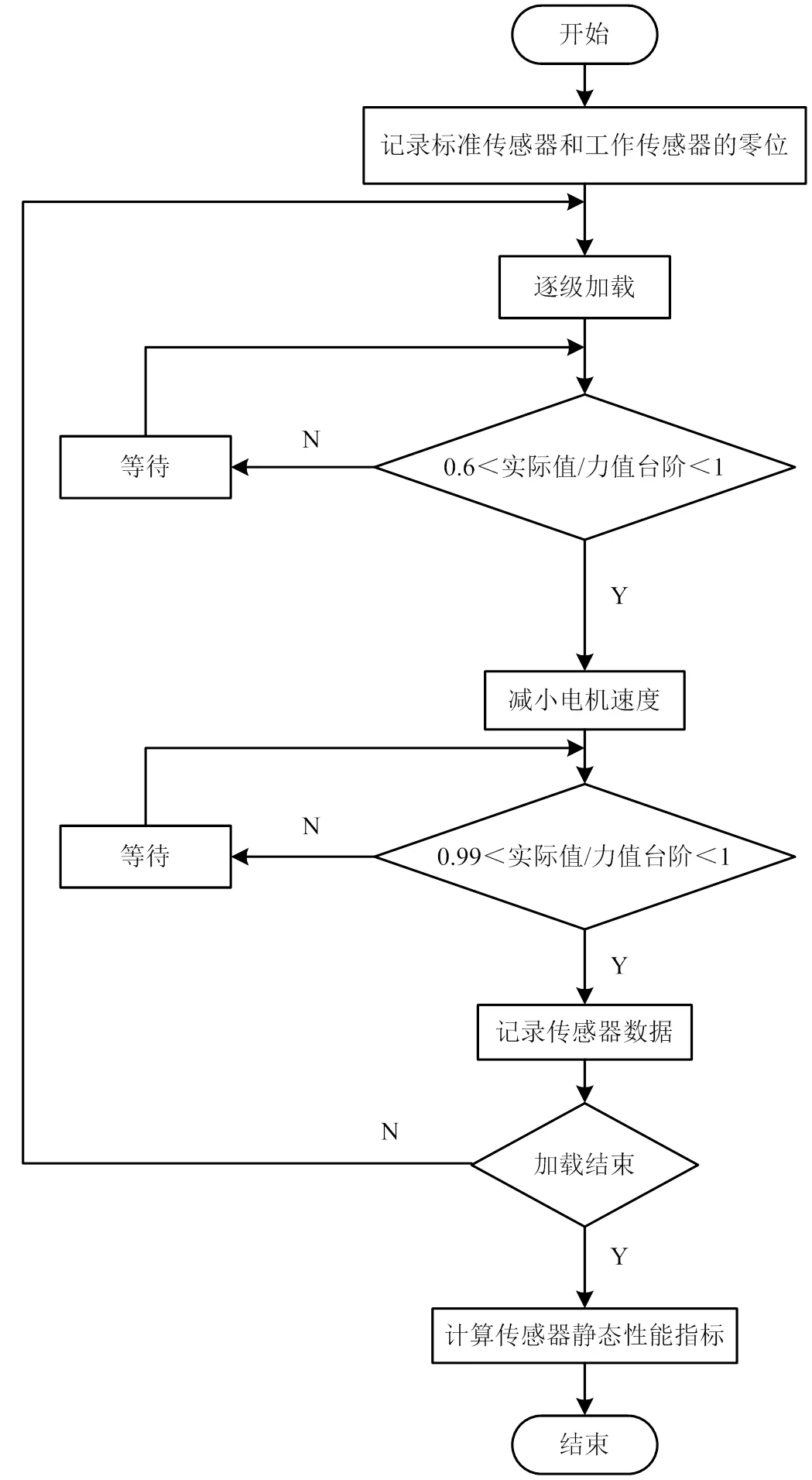
图6 自动校准技术流程图
系统的校准技术采用自动校准技术,日常姿轨控空间发动机试验一般使用油压机手动加载,前端根据检定证书施加力值,后端采集听到口令记录;自动校准技术通过程序控制电机旋转传递力,在到达一个力值台阶时,自动进行记录,继续到达下一个台阶,这避免了人工操作的误差,精度更高。自动校准加载系统的准确度,主要通过远端控制电机的稳定性来实现。
采用逐级加载的方式,在接近比对力值台阶时,如何保证电机在那一点处的稳定性是一个影响精度的重要因素。初步思路是把整个加载过程和卸载过程分为粗加卸载段和微调阶段,微调阶段为在加载力值接近标准值要求的力值时,通过微调达到稳定的目的,主要流程图如图6所示。在自动校准的同时,系统建立了一个数据库,包含不同推力架不同发动机型号推力校准的各项性能指标,方便查阅比对,同时可以分析方差。区别于以记录本的形式记录零散的数据,数据库不仅可以将历史的数据记录下来,还可以随时调用同一推力架同一型号的发动机的数据,做到全生命周期化管理。
4.3 实施方式
系统的实施方式包括以下内容:
a. 根据被测传感器的量程选择弹簧的量程,并安装被测传感器和弹簧;
b. 通过程序控制电机旋转,使电动缸缩短伸长量,便于弹簧安装在弹簧轴上,设置一定的预紧力;
c. 记录初始值,开始进行推力校验,通过弹簧传递力的台阶;
d. 每次到达力的校验值时,减小电机速度,在校验值与实际值之差的绝对值小于某一值时,进行记录;
e. 校准采用正反行程校准,通过信号处理系统记录数据得出传感器静态性能指标与证书比对;
f. 得出结论,并将结果记录在数据库中,方便以后查阅。
5 试验
5.1 试验对象
被测传感器:取试验现场的量程500N传感器进行比对,检定证书如表3所示。

表3 500N传感器检定证书数据

图7 500N传感器检定证书校准拟合曲线
根据检定证书数据可以计算出拟合曲线斜率为0.0395,如图7所示,检定证书中测量结果的不确定度为0.058%。
5.2 试验数据
通过监测系统,对500N传感器进行推力校准,标定数据如表4所示。

表4 推力测量传感器静态标定
由以上数据可以计算出斜率为0.039487,如图8所示,测量结果的不确定度为0.098%。
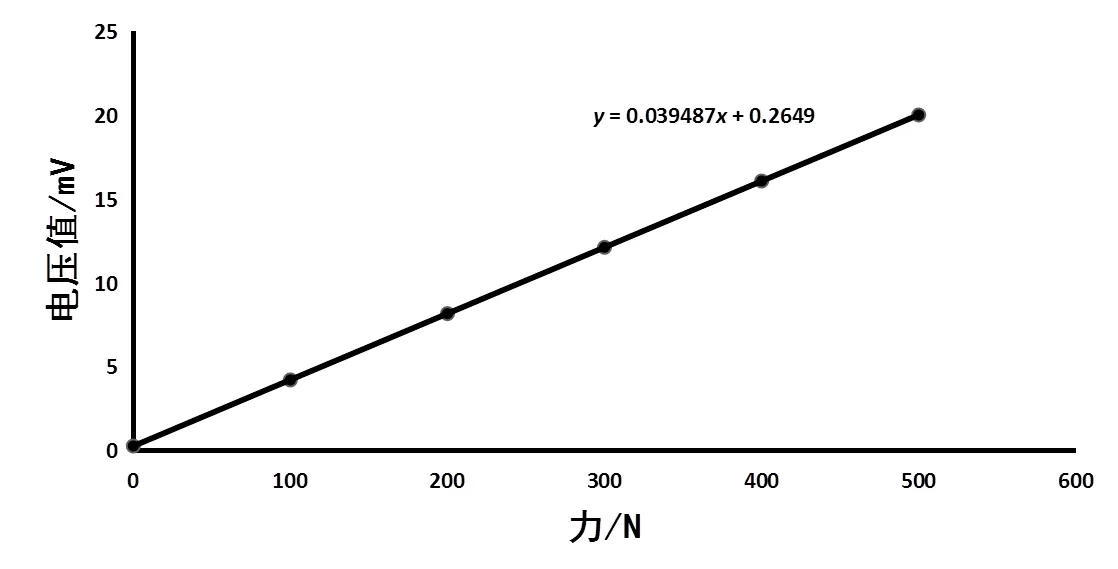
图8 500N传感器自动校准拟合曲线
5.3 试验分析
推力校准的目的是确定工作传感器输入量与输出量之间的关系,在发动机试验中,通过关系函数得出发动机实际力值,关系函数的重要参数之一就是斜率,通过监测系统比对装置得出,检定证书斜率与程序校准斜率对比误差为0.033%,在千分之一内,满足实际需求。
指标实现情况如表5所示。
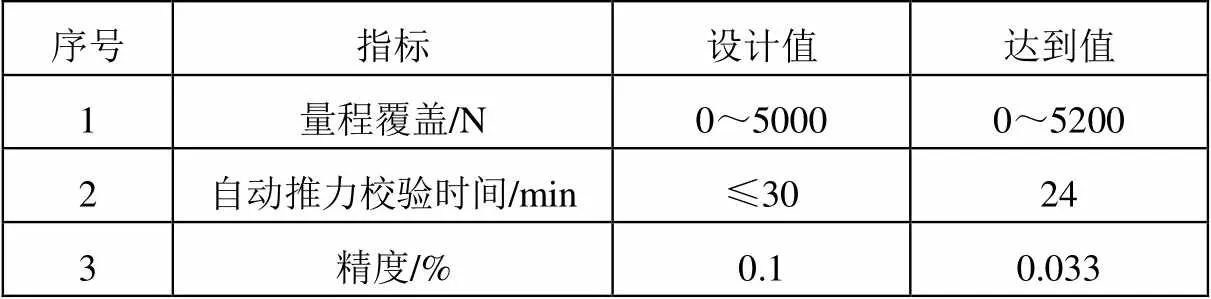
表5 监测系统指标实现情况表
6 结束语
一个推力测量传感器长期稳定性监测的系统其特征在于一套覆盖常用量程的推力传感器比对装置,相比计量所的检验装置,本装置做到了小型化,整套装置占地1.5m2;相比于送到计量所校准,本装置可以在现场直接进行推力校准比对;相比于日常试验油缸加载,本装置采用步进电机和驱动控制器加载,精度更高;相比于日常试验人工加载,本装置采用自动校准技术通过步进电机、驱动控制器、精密直线模组、弹簧伸缩部件、滑轨等校准推力传感器,精度更高;本装置通过设计传感器连接件覆盖了姿轨控发动机试验常用量程20~7500N传感器的校准比对,覆盖范围广;本装置采用了量程不一致结构尺寸一致弹簧伸缩部件以及自适应挡板等,既可以自适应调节也可以达到快速安装的目的。
基于设计研制推力传感器比对装置的系统,开发了新的自动推力校准算法,并已应用到发动机试验任务中。试验前对较长时间未使用的力传感器,通过利用比对装置进行快捷校准,可以预知传感器状态,提前应对相应措施,进而保障试验进度。提升时间效率,减低试验人工成本,减小姿轨控发动机多频次试验压力。
1 郑科,耿卫国,朱子环. 蒙特卡洛法在发动机推力测量不确定度评估中的应用[J]. 计算机测量与控制,2021,29(6):249~254
2 王宏亮,晏卓,李志勋,等. 发动机矢量推力测量与校准系统设计研究[J]. 火箭推进,2018,44(1):75~80
3 颜雄雄,耿卫国. 小发动机推力矢量的测量[J]. 推进技术,2000, 21(3):86~88
4 张伟,田国华,陈锋,等. 远地点发动机推力矢量的极坐标算法[J]. 宇航计测技术,2012,32(2):33~36
5 陈修平. 月面软着陆火箭发动机推力矢量测试系统研究[D]. 大连:大连理工大学,2013
6 史乃青. 小力值推力矢量测试研究[D]. 大连:大连理工大学,2015
7 耿卫国,朱子环. 轨姿控发动机动态推力与推力矢量测试系统研制[J].宇航计测技术,2015,35(6):28~32
8 郑科. 液体火箭发动机推力矢量测量不确定度评定方法研究[D]. 北京:中国运载火箭技术研究院,2021
9 常庆兵. 推力矢量测试装置可控六维力/力矩加载研究[D]. 大连:大连理工大学,2019
10 朱文勇. 发动机推力矢量测试系统研究 [D]. 大连:大连理工大学, 2014
11 化梅. 周向动力布置系统推力矢量测量研究[D]. 大连:大连理工大学,2019
12 朱子环,蔡睿. 氢氧火箭发动机高空模拟试验推力测量装置研制[J]. 宇航计测技术,2016,36(6):50~55
Long Term Stability Monitoring System for Thrust Measurement Sensors Used in Engine Testing Site
Zheng Ke Guo Jianxin Zhu Wang Wang Dezhi Zhang Xuefei Liu Shuo
(Beijing Aerospace Test Technology Institute, Beijing 100074)
Before the high-altitude simulation test of the engine, thrust calibration is required to determine the static characteristic indicators of the sensor, such as linearity, sensitivity, and repeatability. The key task is to establish the actual input-output characteristic curve between the input and output quantities through experimental methods. The validity period of the standard sensor used in thrust calibration is one year. In actual use, the sensor has long-term poor stability or sudden damage, but the only problem that cannot be determined in the preparation stage before the test is the standard sensor. Therefore, it is necessary to monitor the long-term stability of thrust measurement, improve the thrust calibration operating procedures, and develop a thrust sensor comparison device that covers common ranges, When the thrust frame or a standard sensor is not in use for a long time, the standard sensor is calibrated before the test and compared with various indicators of the certificate. After experimental testing, the rapid calibration of the thrust sensor is achieved, with a time of 24 min and an error of within one thousandth, meeting the task requirements of the sensor on the test site.
thrust measurement;rocket engine testing;sensor;thrust calibration

V439+.8
A
某国防科技技术基础项目。
郑科(1996),硕士,制冷及低温工程专业;研究方向:液体火箭发动机测试计量。
2023-07-05
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
中学生数理化·高一版(2021年11期)2021-09-05
煤气与热力(2021年4期)2021-06-09
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
石油化工自动化(2018年5期)2018-11-14
新高考·高一物理(2016年10期)2017-07-07
现代防御技术(2016年1期)2016-06-01
通信电源技术(2016年1期)2016-04-16
新高考·高一物理(2016年1期)2016-03-05
文学少年(有声彩绘)(2016年11期)2016-02-28
