
苹果采摘机器人机械手及控制系统设计
2023-08-07 09:21孙旖彤潘肖楠李明明雷达荣
科技创新与应用 2023年22期
孙旖彤,潘肖楠,张 俊,李明明,雷达荣
(1.陇东学院,甘肃 庆阳 745000;2.长庆油田分公司第十一采油厂,甘肃 庆阳 745000;3.庆阳质量检验检测研究院,甘肃 庆阳 745000)
我国苹果的生产量巨大,一年的总产量大概有3 000 万t。在整个苹果产业生产中,采摘过程占全部所需劳动力的三分之一至二分之一。但是,目前大部分的苹果采用的是人工采摘,采摘的效率非常低,而且耗费的劳动力比较大,在采摘的过程中还会遇到一些不可预知的危险。因此机械自动化采摘尤为重要。
针对市面上一些辅助机器易损伤、效率低的问题,本文研究的苹果采摘机械手是一种自动化的水果采摘机械手,通过控制系统和机械结构的自动操作就可以完成采摘苹果的工作,这样大大提高了劳动效率,对促成苹果产业的发展具有重要的运用价值。
1 机械手结构设计及相关计算
1.1 机械手爪对苹果摘取的原理
苹果采摘机器人经过多年的发展,其驱动部分主要有液压、气压、电机驱动,而手指结构设计分为两指和多指。本文中研究的机械手爪采取三指,利用电机进行驱动。
通过分析采摘机械手装置的机械原理,本文采取电机控制刚性连杆带动其运动的连杆驱动型手爪,其装置主要由电机、丝杠、轴承等零件组成。
电机采用丝杠步进电机,丝杠与螺母结合,丝杠作为主动体,当丝杠转动时,螺母就会随之转换为直线移动,螺母连接着支持连杆使其运动,最后带动机械手抓取苹果。
当机械臂到达苹果的位置时,发出信号给控制系统,使其驱动步进电机进行正转,带动螺杆转动使螺母上升,同时带动连杆也上升,然后机械手握紧,抓住苹果,而当机械臂到达放置苹果的位置时,单片机驱动步进电机反转,螺母下降,同时也伴随着机械手张开,放置苹果。而在机械手张开和握紧期间,通过螺杆的自锁能力使机械手关节不会受苹果重力而张开,装配图如图1 所示。
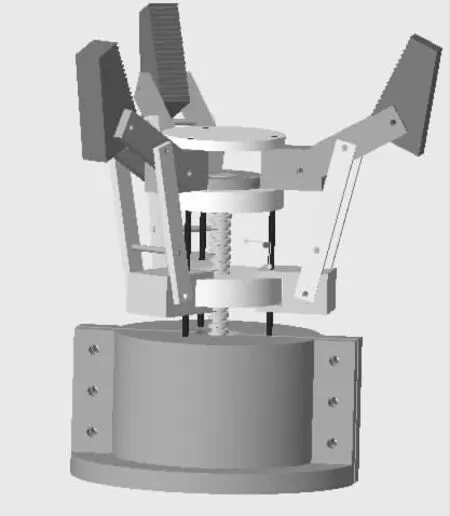
图1 装配图
1.2 手指的结构设计
手指部分包括近端关节和末端关节,设计执行机构时要考虑采摘过程中是否会对果实造成伤害,为了尽可能降低对果实造成的伤害,决定在末端关节的内侧装上较为柔软的尼龙材料。
近端关节材质为铝合金;末端关节材质为尼龙材料。
手指部分包括近端关节、末端关节,为了使机械结构易于制作,因此采用曲柄滑块结构,连杆简图如图2所示。
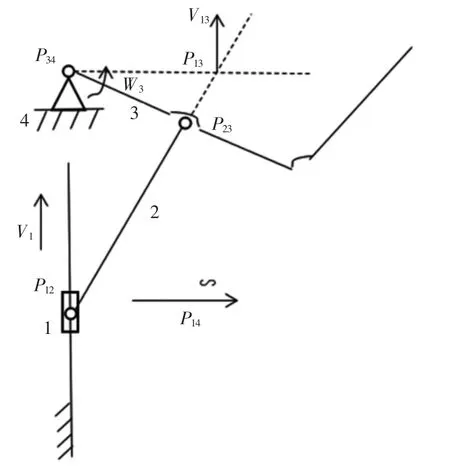
图2 连杆简图
1.2.1 运动分析
1)寻找瞬心P13。对于直接连接的杆件,其瞬心可直接判断出P12P34P23瞬心。P12是构件1、2 的瞬心,P14是构件1、4 的瞬心,P34是构件3、4 的瞬心。
对于两构件未直接相连的,其瞬心利用三心定理进行判断,延长1、2 杆和垂直于杆1 的点,可判断出瞬心P13。
2)求角速度与螺杆速度关系
作图分析,可得出以下公式
式中:IP12P34为P12到P34的距离,W3为P13的角速度。又因为P13是构件1、3 的瞬心,根据式(1)和式(2)可得。
1.3 手指的尺寸确定
机械手第一个关节末的位置如图3 所示,在坐标系O-xyz 中 为 点A(0,y1,z1),O'O=l1,sin120°=0.78,cos120°=-0.5。
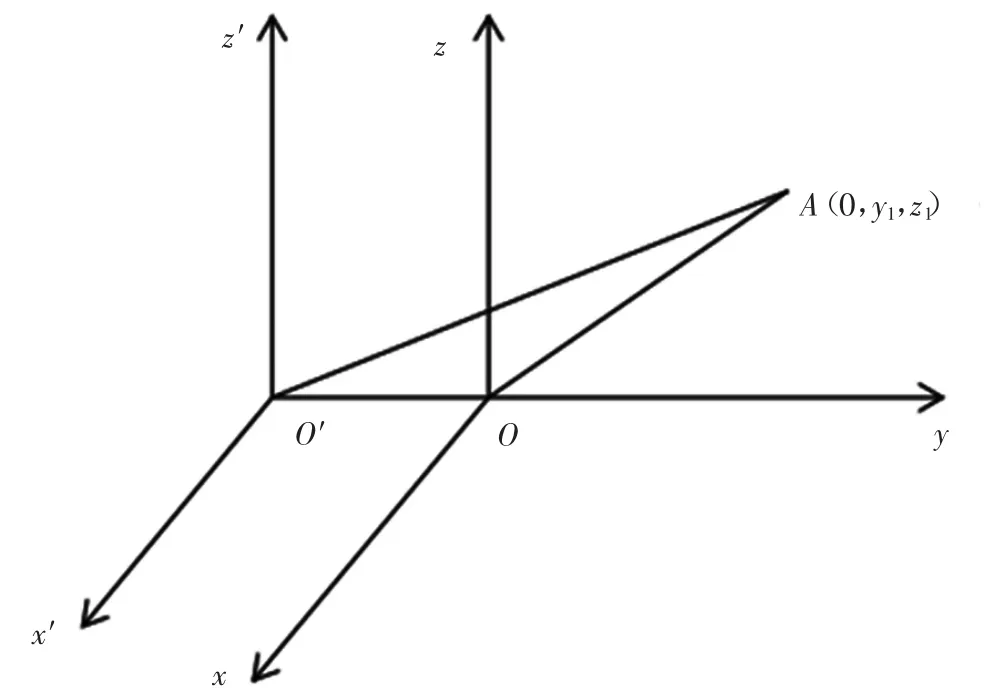
图3 第一个手指位置图
对于O'-x'yz'坐标系,A 点对应的坐标为A'(0,l1+y1,z1)
利用H 变换矩阵,分别沿z 轴旋转120°为另外2个机械手手指的坐标
因为空间坐标中的O'A,O'B,O'C 大小相等,且为绕z 轴旋转120°所得,所以3 点连线为一个正三角形,如图4 所示。

图4 苹果横切面简图
由公式
可求得手指末端关节长度
苹果高度一般为50~110 mm,直径在50~110 mm,为机械手指尺寸提供依据。
由R≥55,z1≥55,已知l1=40,z1选取为60,OA选取为80。
1.4 受力分析
机械手夹持苹果重量为100~400 g,对其受力分析如图5 所示。
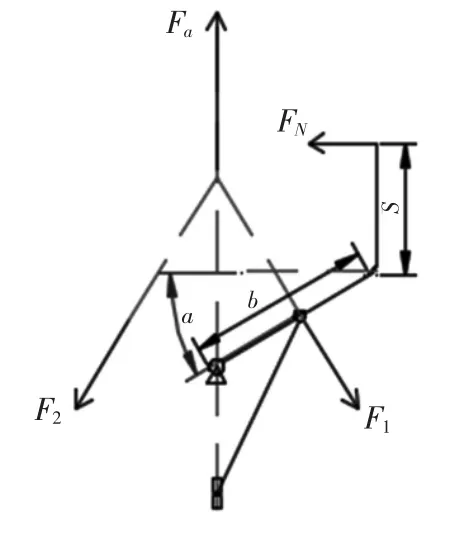
图5 受力分析图
机械手另外2 个第二关节的受力处根据三力平衡汇交定理,可合成为力F2与F1,其汇交于一点,Fa为螺母向上的推力,构成三力平衡,可得公式
三指对苹果的力可表示为FAFBFC,利用三力平衡汇交定理,FAFB的合力FN与FC平衡,所以根据公式2FNμ≥mgk1,可求得
由尼龙材料的摩擦系数μ=0.15~0.25,取μ=0.2,安全系数k1取1.5,a=30°;苹果重量选择0.4 kg 进行计算;求得FN≥14.7 N,因此选择夹持力为15 N,求得驱动力Fa≈47.3 N。
1.5 手掌的结构设计及相关计算
手掌处主要是螺杆的设计及计算,本文中采用滑动螺旋传动,其结构简单,成本低廉,并且相较于滚动螺旋传动,滑动螺旋传动有自锁能力;因此本部分主要进行滑动螺旋传动中螺杆螺母尺寸的选择、强度校核、自锁性验算以及稳定性校核,其螺杆示意如图6 所示。

图6 螺杆图
1.5.1 丝杠轴向载荷力的计算
螺杆上方重量为m=2 kg。
轴向载荷公式如下
由式(8)进行计算得F≈67 N,因此选取轴向载荷力F=70 N,最为合适。
1.5.2 选材以及许用应力计算
螺杆螺母都采用45 号钢,选择梯形螺纹,其牙形角为30°,因此由《机械设计手册》,可取σp为360 MPa,由
可取许用拉压力σp=90 MPa。
因为机械手上升运动为低速运动,因此查《机械设计手册》得螺杆对螺母的许用压强[p]=7.5~13 MPa,取值为10 MPa。
1.5.3 螺纹尺寸选择及校验
螺纹尺寸取值,见表1。

表1 螺纹尺寸 mm
由耐磨性校验螺纹中径是否合适:
当螺纹为整体式时,螺纹升角系数(ψ)取1.2~2.5,取ψ=1.5。
依据《机械设计手册》梯形螺纹,取ξ=0.8,F=70 N。
由公式可计算出螺纹中径
所以螺纹中径选择为9 mm,上表尺寸数据合适。
因此,基本牙型高度
螺母高度
旋合圈数
选取中等精度,螺旋副标记为Tr10×2—7H。
1.5.4 自锁性校验
导程P=2 mm,查《机械设计手册》表12-1-4,可得螺纹升角
查《机械设计手册》表12-1-7,可得f=0.15~0.17,取值0.17,得
因为λ<ρ,所以自锁可靠。
1.5.5 驱动转矩计算
由公式
计算出驱动转矩T=70.277(N·mm)。
1.6 手腕的结构设计及机械手材料选取
手腕主要结构是安装电机,以及对接机械手臂,对其材料有一定要求,而果农采摘水果时,还可能会遇到恶劣天气,因此材料需要一定强度和耐腐蚀性。
铝合金材料质量轻,强度够,耐腐蚀且价格低廉,所以材料采用铝合金。
2 控制系统硬件设计
2.1 控制系统硬件组成
硬件是由主机、接口电路及外部设备组成。其相应的示意图如图7 所示。

图7 控制系统硬件示意图
机械手及其末端执行器在运动时需要各种传感器进行辅助,但因个人知识水平有限,因此本文只对其中的单片机、力传感器、电机部分进行相关选用及设计。
2.2 力传感器
2.2.1 RP-C 电阻式压敏传感器
人手摘取苹果时,是通过皮肤和眼睛把消息传递给大脑,实现抓取;与此相同,机械手实现抓取动作,需要传感器把信号传递给单片机,随后单片机控制电机进行转动,带动执行装置完成抓取苹果功能。
本文选用的压力传感器是RP-C10-ST 薄膜压力传感器,这是一种直径为10 mm 的圆形柔性传感器,由综合机械性能优异的聚酯薄膜,高导电材料和纳米级压力敏感材料组成,由曲线图查表获得Rx和F 的关系式
因为苹果压力小于20 N 时,表皮没有损伤,但如果超过20 N,苹果表皮虽然没有直接损坏,但内部出现组织损坏。为了使苹果采摘时不被损坏,则手指的压力不应该超过20 N。
依据曲线可以看出,随着压力的增大,电阻不断变小,因此传感器输出的电阻应该大于26.6 Ω。
2.2.2 压力传感器应用电路
压力传感器输入信号,单片机要检测到该信号时,需要相应电路进行该信号的放大与转化;应用电路主要使用电阻分压器,然后把分压的电压输入电压比较器中,然后通过设计使其输出高低电平,最后连接相关单片机串口,使单片机进行步进电机启停的控制。
1)电阻分压器。电源电压为5 V,传感器可以等效为一个可变电阻,其串联一个R1=20 Ω 的电阻,整个电路起到分压的作用。
输出电流
分压电压
由上公式可推导出
其曲线图如图8 所示。
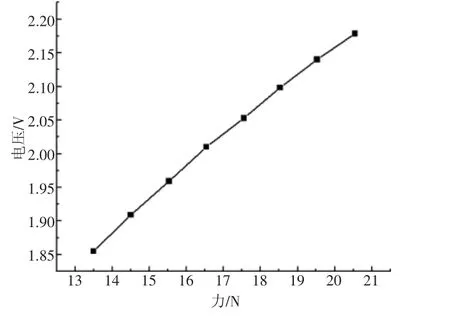
图8 电压/力关系图
2)电压比较器。UP处接入VN口,VE接一个比较的电压,当VN>VE时,比较器不导通,输入5 V 电压作为高电压;反之,当VN<VE时,比较器导通,输出低电压。
苹果抓取的力一般不会超过15 N,其为了采摘苹果时不损坏果皮,按照曲线图,电压不应该大于2.1 V,但为了单片机在手抓取时发出信号,使电机停止转动,应该使VE接一个1.9 V 的电压。
当UP电压超过1.9 V 时,电压比较器输出高电压,单片机接口检测出数值为“1”,电机停止转动,螺母自锁使机械手抓取的苹果不会掉落。
2.3 单片机选用
在本次苹果采摘机械手的控制系统中,选择AT89C51 单片机,其通过IO 口输出的具有时序的方波作为对机械手控制动作的信号,这一方波信号会通过芯片LN298,进行信号放大,然后驱动步进电机以此来实现机械手的摘取动作。
AT89C51 单片机与MCS-51 单片机兼容,价格便宜,IO 口的操作简单,指令简单,极其适合用于作为本文控制部分的设计。
2.4 电机选用
本次设计的苹果采摘机械手的驱动部件是由电机实现的,因此电机的选择是整个结构设计和控制系统设计的关键。常见的机器人的运动形式在于对步进电机的控制和驱动,为了设计的方便,此次设计选择电机为四相的步进电机(内阻33 Ω,步进角度1.8°,额定电压12 V)。
想要驱动电机,必须需要响应的驱动电路,因此使用LN298 芯片,不仅可以充分发挥了步进电机的功能,能稳定地驱动步进电机,而且从经济考虑,价格不高,其可以直接用单片机模拟出时序信号,控制不复杂。
本文步进电机步距角为1.8°,螺杆导程为2 mm,所以单片机需要发出200 个脉冲,螺杆螺母将转动一周,其简单的系统结构图如图9 所示。
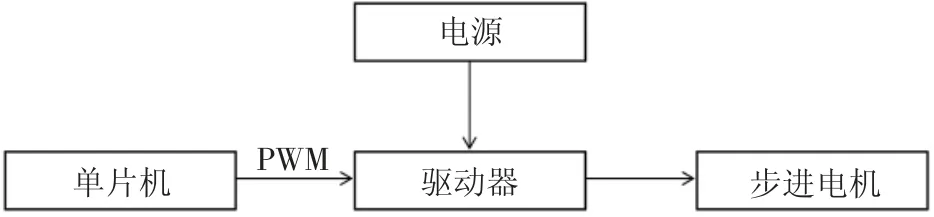
图9 步进电机控制系统结构图
如图10 所示,单片机对EN A、EN B 口发送方波脉冲信号,接P3.4、P3.5 引脚,IN1~IN4 接AT89C51 单片机P0.0~P0.3 口;单片机接受到力传感器和位置信号后,通过输出脉冲,然后经过LN298 芯片信号放大,实现电机正反转以及启停。

图10 电机接线图
3 仿真分析
3.1 三维装配
在机械手装配过程中与其他装配过程大致相同,在装配时,需要选择合理的连接方式,使后期仿真顺利进行,因此选用销钉、滑块等方式进行装配,其装配图先进行手指部分,然后进行总装配。
3.2 仿真过程
为了使设计的产品能够合理地进行运动以及实现需要的功能,在设计中往往会进行仿真分析,本文利用creo4.0 进行仿真分析,其仿真分析过程如下。①打开已经装配好的机械手爪,点击“应用程序”,运行“机构”命令。②点击电动机,为机械手添加驱动装置。③进行机构分析,点击运行。④点击“回放”,然后打开“动画”界面。⑤打开“动画”界面后,选择播放查看仿真是否合适,随后点击“捕获”,选择保存路径,点击保存的视频类型,随后点击确定,最后就能够获得仿真动画视频。⑥曲线图绘制。点击测量,进行新建测量定义,输入需要测量的角速度连接轴,点击图形工具,曲线图如图11 所示。

图11 角速度图
4 结束语
苹果人工采摘作业季节性强、人工成本高、劳动强度大,是苹果生产链中最耗时、最费力的一个环节。因此,研制一款苹果采摘机器人具有重要的经济意义,能够有效降低工人劳动强度,提高生成效率,保证苹果及时采收。通过对苹果采摘机器人手指和手掌进行结构设计,尺寸计算和受力分析,完成了苹果采摘机械手的整体方案,并进行了控制系统的设计和简单的仿真,验证了该机械手的设计合理性,零件的结构要素符合预期的设计目标,为下一步的步态规划和样机研制奠定了基础。
猜你喜欢
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
思维与智慧(2020年7期)2020-04-09
福建质量管理(2018年20期)2018-11-14
橡塑技术与装备(2018年20期)2018-10-20
橡塑技术与装备(2018年10期)2018-05-18
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
机电信息(2014年29期)2014-02-27
