模值观测IMU零偏快速标定技术
2023-08-03 08:29:48马国驹刘鹏娇邢博文
兵器装备工程学报 2023年7期
马国驹,刘鹏娇,邢博文
(中国电子科技集团公司第五十四研究所, 石家庄 050081)
0 引言
捷联惯性导航系统(strap-down inertial navigation system,SINS)能够自主实时高输出频率地为运载体提供包括速度、位置和姿态在内的导航信息,广泛应用于军事和民用领域[1-4]。惯组,又被称为惯性测量单元(inertial measurement unit,IMU),是SINS的核心惯性敏感部件,具体的由三轴正交安装的陀螺仪和加速度计组成,惯组的误差包括零偏、刻度因数、安装误差角和高阶误差项。由于SINS基于航位推算原理的导航解算方式,SINS的导航误差随时间增加而增加且主要取决于惯组的零偏[5-7]。基于六面体、分度头或转台的惯组室内标定是确定惯组误差和保证SINS导航精度的重要手段。然而,惯组内的陀螺和加速度计特性会随着时间和环境的变化而变化,其中,惯组零偏是变化最大的标定参数。若在惯组使用现场沿用室内标定的零偏结果,将导致SINS导航精度的严重降低,因此,惯组零偏的现场标定是惯组现场使用的一个重要步骤。然而,惯组零偏的现场标定面临着时间短和不具备室内标定条件的挑战[8],为满足外场试验对惯组零偏标定提出的时间短、精度高的要求,需要对惯组零偏的现场快速标定方法进行研究。许多学者将惯组零偏标定与SINS初始对准相结合,在SINS精对准阶段借助转位机构进行SINS转位以实现惯组全零偏的完全可观测,通过滤波方法实现惯组全零偏的估计,即基于静基座多位置对准方法的惯组零偏标定[2,7]。然而,这类惯组零偏估计方法需要借助转位机构且滤波需较长时间以保证零偏收敛精度,不太适用于外场惯组零偏标定时间短以及无转位设备的背景。为此,李建利等[9]根据解析粗对准原理,研究了欧拉角对惯性传感器零偏的敏感性,分析地球自转角速度在载体系误差与粗对准姿态间的关系,建立了任意两位置三轴陀螺零偏标定关系式,实现了惯组三轴陀螺零偏的标定;然而该方法没有标定惯组三轴加速度计零偏;卢家振等[10]基于解析粗对准原理分析了重力加速度计误差与粗对准姿态误差间的关系,提出了改进三位置惯组全零偏标定及解析粗对准算法,但需要对惯组零偏标定位置进行编排设计。王岁儿等[11]通过构建解析式初对准捷联矩阵非正交、非单位化误差与北向、天向陀螺及天向加速度计零偏关系,提出了一种三位置惯组全零偏快速标定方法,但只对战术级惯组进行验证。
现有方法还无法很好地解决惯组零偏现场标定中时间与精度的矛盾,模观测标定方法基于当SINS处于静态时,三轴陀螺测量地球转角速度而三轴加速度计测量当地重力加速度,利用测量值的模进行标定,具有速度快、不需要依赖标定设备精度的优点[12]。因此,针对外场试验对惯组零偏标定提出的时间短、精度高的要求,提出了一种基于模观测法的惯组零偏快速标定方法,建立惯组零偏模值观测标定非线性方程,通过最优化非线性函数求解工具完成惯组零偏参数的选取得到标定结果,通过任意三位置即可实现惯组6个零偏参数标定,每个位置采集数据一分钟,整体标定时间3 min,具有快速标定的突出优势。同时,无需考虑方程求解奇异,也不需要进行标定位置编排,该方法同时适用于低精度和高精度惯组的零偏标定。通过不同精度惯组的零偏标定仿真验证了所提出方法的有效性,并基于提出的方法用实际低、中、高精度惯组的标定试验验证了所提出方法的正确性和可行性。
1 基于姿态矩阵IMU零偏标定方法

1.1 二位置陀螺零偏标定方法

(1)


消元dφ,可得到2个IMU陀螺零偏计算方程:
1.2 三位置加速度计零偏标定
对上面三式,消元dθ、dγ并化简整理,可得加速度计零偏标定公式:
通过3个位置可对三轴加速度计零偏进行求解。
1.3 二位置陀螺、三位置加速度计零偏标定方法不足
以三位置加速度计零偏标定为例,将其零偏标定计算式改写成非齐次线性方程的形式如下:
Ax=B
(8)
其中A、x、B分别为
条件数是线性方程组Ax=B的解对B中误差或不确定度的敏感性的度量,条件数较小的方程组解的精度较高,反之条件数越大表明方程解中误差越大。在加速度计零偏标定中,当水平姿态θ、γ均为45°时,A矩阵的条件数为3.6,此时加速度计零偏标定精确;当水平姿态θ、γ均为85°时,A矩阵的条件数为12.8,此时加速度计零偏标定含有较大的误差;当水平姿态θ、γ均为89°时,A矩阵的条件数为56.2,此时不能得到有效的零偏标定结果,这种零偏标定方法不可用。此外,当水平姿态角都为0°时无法对z轴加速度计零偏进行标定。因此,基于解析粗对准的惯组零偏标定方法存在着需要规划标定路径、时间长的问题。
2 基于模观测IMU零偏标定方法
基于解析粗对准惯组零偏标定方法存在需要对SINS位置编排,且惯组零偏精度受解析粗对准姿态精度的影响,最终导致惯组零偏标定精度不高。当SINS静态时,三轴陀螺仪、三轴加速计所测量的地球自转角速度与当地重力加速度为模值观测,建立模值观测标定非线性方程,惯组零偏模值标定方法减少了对SINS位置要求,且不会将解析粗对准姿态误差引入到惯组零偏标定中。
SINS处于静态条件时,不考虑惯组的安装误差及标度系数误差,加速度计理想测量模值为当地重力加速度值,而陀螺理想测量值是地球自转角速度值,对加速度计及陀螺的测量信息分别取模,得到:
对三轴加速度计组件:
对三轴陀螺组件:

通过增加SINS位置可以增加非线性方程组的个数,惯组零偏标定求解参数陀螺和加速度计均为3个,即需要3个位置模值观测就可实现惯组零偏的标定,进而也将IMU零偏标定转换为非线性方程组求解的问题。将上式等效为如下最小损失函数:
代价函数分别为
具体的方法为:将惯组3个敏感轴分别朝天1 min,采集惯组静态三轴陀螺、加速度计数据,将数据代入式(13)—(15)中,进行遗传算法最小值寻优获得零偏。具体地,目标函数为式(13),变异参数为0.2。
3 测试结果及分析
模观测IMU零偏标定方法既不需要转位机构提供准确的姿态,也不需要进行零偏标定位置编排,且适用于低精度和高精度惯组零偏标定。为了验证所提出方法的有效性及标定精度,开展了仿真及实际系统零偏标定测试。此外,为了进一步验证该零偏标定方法的普适性,分别对低精度、中精度、高精度的3种精度等级的光学陀螺IMU零偏标定实验。
3.1 仿真试验
模观测惯组零偏标定仿真从低精度到高精度SINS选择6组不同零偏陀螺和加速度计组合,仿真设置参数如表1所示,以相同量级的加速度计、陀螺组成惯组并添加相应的数值10%为随机白噪声。选SINS每个敏感大致朝上3个位置IMU测量可实现零偏标定,仿真生成不同精度IMU三个位置1 min静态数据,数据更新频率设为200 Hz。

表1 仿真设置IMU零偏表
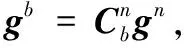
对采集的IMU三位置静态数据采用模值观测零偏标定方法计算零偏。以表1中序号4仿真精度IMU为例,其IMU三轴陀螺零偏、三轴加速度计零偏迭代收敛曲线如图1所示,从图1中看出经过15次迭代后趋于稳定εx、εy、εz计算值分别为0.029 8(°)/h、0.021 2(°)/h、0.009 2(°)/h,而▽x、▽y、▽z计算值分别为199.2、151.4、100.6 μg,计算的IMU零偏计算与仿真设置的零偏误差非常小,其他精度级别IMU零偏计算结果统计见表2。从表2中结果看出,表2所列出几种不同精度IMU计算陀螺零偏误差均小于仿真设置零偏的10%,而计算的加速度计零偏误差均小于仿真设置的1%,基于模值观测IMU零偏仿真标定结果符合预期,验证了该方法有效性和正确性。
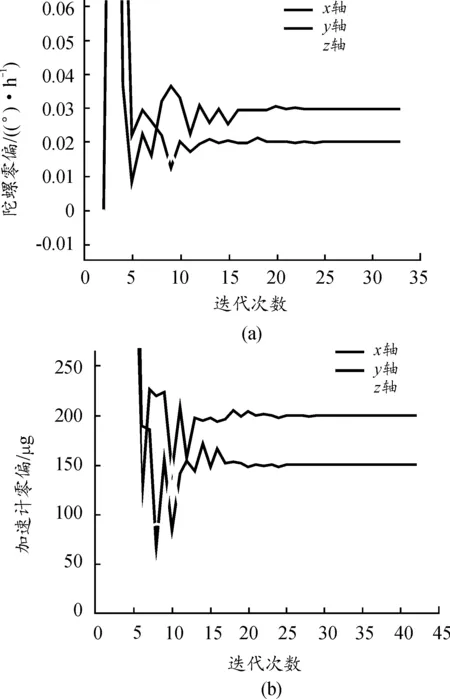
图1 陀螺零偏、加速计零偏迭代收敛曲线

表2 仿真计算IMU零偏结果表
3.2 实际系统试验
为了进一步验证所提出的标定方法有效性,以3种不同精度等级的光学陀螺惯导系统进行了惯组零偏标定验证实验。图2为战术级光纤陀螺惯导系统在转台测试图,陀螺零偏稳定性约为0.5(°)/h,加速度计零偏稳定性约为200 μg,图3为2套激光陀螺惯导系统转台测试图,其中军绿色为50型激光陀螺惯导系统,陀螺零偏稳定性优于0.01(°)/h,加速度计零偏稳定性优于100 μg;而浅灰色为90型激光陀螺惯导系统,陀螺零偏稳定性优于0.005(°)/h,加速度计零偏稳定性优于50 μg。
图2 战术级光纤陀螺惯导系统转台测试

图3 2台激光陀螺惯导系统转台测试图
考虑实际系统的真实零偏难以获得,所以在以分立式标定的零偏值作为参考值,惯导系统温热稳定工作不断电短时间其零偏变化量可忽略不计,系统不断电的条件下进行模值观测惯组零偏标定实验。转动转台使得SINS三个敏感轴分别在朝上的位置保持静止1分钟,数据更新率为200 Hz,对采集IMU三个静态位置数据进行零偏计算并将结果统计在表3中。

表3 三套实际系统计算IMU零偏结果
通过对3台不同精度级别惯导系统模值观测IMU零偏标定实验,从表3可以看出,计算值与参考值的偏差均比对应精度的惯组精度高一个数量级,即IMU零偏模标定计算结果与参考值相差在可容许的范围内,结合仿真及实际系统的IMU零偏标定实验,验证了模值观测IMU零偏标定方法的正确性与可行性。
4 结论
针对外场试验对惯组零偏标定提出的时间短、精度高的要求,提出了一种基于模观测法的惯组零偏快速标定方法,获得的结论如下:
1) 所提出的基于模观测法的惯组零偏快速标定方法基于惯组三轴测量信息模值,通过将惯组3个敏感轴分别大致朝上3个位置,实现惯组所有零偏的解耦求解,完成惯组零偏标定。
2) 整个惯组零偏标定仅需约3 min,而且不用借助转位机构,仅需让每个敏感轴大致朝上保持静态1 min,适用于外场惯组零偏快速标定。
3) 利用仿真和试验验证了所提出方法的有效性,计算值与参考值的偏差均比对应精度的惯组精度高一个数量级,即惯组零偏模标定计算结果与参考值相差在可容许的范围内。
猜你喜欢
铁道通信信号(2021年1期)2021-04-10 08:15:46
测控技术(2018年2期)2018-12-09 09:01:02
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
导航定位与授时(2016年4期)2016-03-16 06:36:51
中国惯性技术学报(2015年1期)2015-12-19 13:11:44
计算机工程(2015年4期)2015-07-05 08:28:57
导航定位与授时(2015年5期)2015-03-10 06:09:27
沈阳理工大学学报(2015年3期)2015-02-20 05:47:34