“绿色无耗”
——基于流量数据的可变道系统设计
2023-08-02 00:46:52王晓楠陈文文毛陈晨
科海故事博览 2023年21期
王晓楠,陈文文,毛陈晨,胡 峰
(徐州工程学院物理与新能源学院,江苏 徐州 221111)
随着国内城市化的快速发展,城市功能区越来越分明,造成产业集中区、政务服务中心区等功能区域房价居高不下的现象,功能区域的主职比下降较快。同时伴随着经济的发展,私家车的保有量逐渐增加,极大地增加了交通的运行压力,道路拥挤,潮汐现象普遍出现。在寸土寸金的功能区域,一味扩宽道路,会造成资源的过度浪费,也是不现实的。所以,如何在不改变现有的交通网络格局的情况下,安全、有效且不消耗过多资源地缓解交通压力,成了一个不可忽视的问题。
国内外专家对潮汐车道的设置以及优化进行了广泛而深入的探讨。陈婷婷等人提出构建双层规划模型来缓解路段交通流不平衡[1];文建斌等人提出将交通诱导和潮汐车道控制相结合的办法,从而避免设置潮汐车道带来的空间资源错位的问题[2];魏庆琦等人基于累积前景理论和退化路网来优化路网[3];郑桂传等人利用VISSIM 仿真软件和SSAM 软件对潮汐车道设置进行了运行效果的评价[4];类似的还有魏双秋和马健等人的工作[5-6]。尽管“潮汐车道”的布局与测试进行得如火如荼,但也不能全然忽视它的弊端与不完善的方面。虽然可变道控制系统提高了城市交通系统流通速率,但这些地方的交通事故率却也逆势上扬。所以现在关注的重心便在于如何在保证“潮汐车道”效率性的同时兼顾安全,这时就需要我们运用数据分析具体情况,在可变道控制系统自动状态下添加人工手动模式[7],以防止突发情况的发生。同时也要注意采集数据的多样性,这样会使控制方向的效率更高,更加精准。
1 潮汐车道设置的依据
1.必要性。彭祖大道作为连接徐州市老城区和新城区的一条主干道,承载着新老城区东西方向的通勤要求。道路建设标准双向8 车道,以及双向独立人行道和非机动车道。彭祖大道东段设置有大量的市级行政机关以及企事业单位,在上下班高峰期间,就易出现潮汐现象,导致彭祖大道道路资源分配不合理,成为困扰群众出行的难题。
课题组经过现场调研和收集交通部门的数据,发现在早高峰时段,居于老城区的通勤人员采用自驾、公共交通等形式由西向东出行,导致彭祖大道东段附近出现严重的拥堵。而晚高峰工作在新城区的通勤人员大量聚集又会使得彭祖大道西段出现明显的延误问题。
这里采用马健等人给出的方向不均匀系数量化公式[8]:
其中,K 为研究方向的不均匀系数;Q 为道路研究方向横断主车流量,q 为道路研究相反方向的主车流量。
根据交通部门给出的数据,利用公式(1)给出西向东的早高峰方向不均匀系数为0.87,晚高峰方向不均匀系数为0.31。与之相对应的对向不均匀系数分别为早高峰0.13 和晚高峰0.69。从量化的数值可以看出具有明显的潮汐现象,也正是本文要研究的必要性所在。
2.可行性。彭祖大道设计为直行2 车道,左右转各1 车道,人行道和非机动车道各1 道,做到了机非分离,完全满足潮汐车道设置要求。同时我们也发现早晚高峰的方向不均匀系数大于2/3,满足流量要求。
2 基于流量数据的可变系统设计方案
2.1 总体方案设计
可变道控制系统,其特征为基于流量数据分析下的变道,系统包括红外光电控制模块、WiFi 模块、单片机控制电路、太阳能供电等模块。系统采用的是对射式的光电传感器,一次射出光线,收光器便会接收一次信号,发出一次低电平控制信号给单片机处理层,处理层接收信号开始计数并上传显示层,并且开始计算,当第二车道的计数和第一或第三车道计数大于其中之一时,单片机会启动舵机电源,使舵机运转控制。此外系统还设置了手动控制层,通过WiFi 模块使软件和单片机连接,直接控制舵机的转向。车流量检测器运用的是红外光电传感技术,它的作用是对实时的车流量进行检测统计,并按照设计好的时间间隔上传到平台。后端平台则负责接收数据,并利用数据算法计算处理需要判断的数据,由此决定车道的运行方向。
2.2 硬软件设计
本方案的硬件主要有STC89C52 单片机,光电传感器,SP30 舵机模块以及ESP8266 模块。其中系统采用完全相同的三组红外对射模块。用红外模块模拟三种车道,将光电传感器模块的OUT 端口与STC89C52 单片机I/0 端口直接相连。由于接收器和发射器中间有一段距离,当接收器出现光信号中断时,电路板上的绿灯亮起,此时OUT 端口开始持续输出低电平信号,代表有一辆车通过。系统采用的是SP30 舵机模块,贴合本系统的车道变换方案的实施。利用 ESP8266 WiFi 模块种工作模式之一的AP 模式进行数据传输。AP 模式的工作是使得WiFi 模块成为一个热点,通过连接热点的形式让上位机直接沟通,并通过手机端口的APP 下达指令形成控制。
程序设计采用基于C 语言软件编程的keli5 软件,同时电路开发与设计采用的是Altium Designer 软件。基于流量数据的可变道控制系统的系统流程如图2 所示。首先电源通电系统启动,自动初始化程序,单片机读取红外接收器通过串行口发送过来的数据并进行简单运算,将结果通过PWM 信号利用时钟中断发送给SP30 舵机实现功能运转,并通过WiFi 显示在显示屏上。由于是循环数据系统,流程结束将会回到中断程序,通过低电平复位,以此往复。
2.3 方案调试
方案实物图如图1 所示,设计主要功能是为了检测数据流量的大小并由单片机通过舵机给予反馈。首先给系统接入5V 电源启动,设备开始初始化,显示归零。初步检查,舵机模块位置居中,红外模块红色LED 亮起,电路运行正常,WiFi 模块发送数据正常。其次进行数据功能检测,用不透光的硬壳纸阻挡红外光的直射充当一次车流量数据,当纸板在一、二、三卡槽一次放入,显示屏显示数量加一,显示正确,系统数据结构正常。此时系统舵机运转,将系统一车道与二车道的计数大于三车道,大约一分钟后,舵机右转,功能正常。系统结构完整,功能正常,组成了基于流量数据的可变道控制系统设计。

图1 系统实物图
在系统初步完成后,经过调式发现偶尔会出现系统卡顿延后的现象,为了增加安全性和稳定性,后续加入了人工干预模式,实现了手机端对于变道系统的控制。
3 方案量化仿真
为了更好地验证当前的方案设计,我们采用PTVVISSIM 软件对彭祖大道的主次干道、重要路口等进行了仿真,采用郑桂传等人给出的模型,着重探讨潮汐车道设置前后交通状况差异化的影响,即考虑通行时间和延误时间。
从图2 可以看出,早高峰西向东方向在设置潮汐车道之后,通行的总时间从312 秒下降到284 秒,总的行程时间减少了11.86%。与之相对应的,延误时间也从原来的163 秒下降到136 秒,总的延误时间减少了16.56%。但是值得注意的是,与之相反方向,无论是总的行程时间还是总的延误时间都没有明显的改善。当前仿真结果与郑桂佳、马健等人的结论相一致,即考虑的主要方向通行能力有明显的增加,次方向通行能力下降。但是从道路使用者最大利益来说,当前的道路资源分配还是合理的。
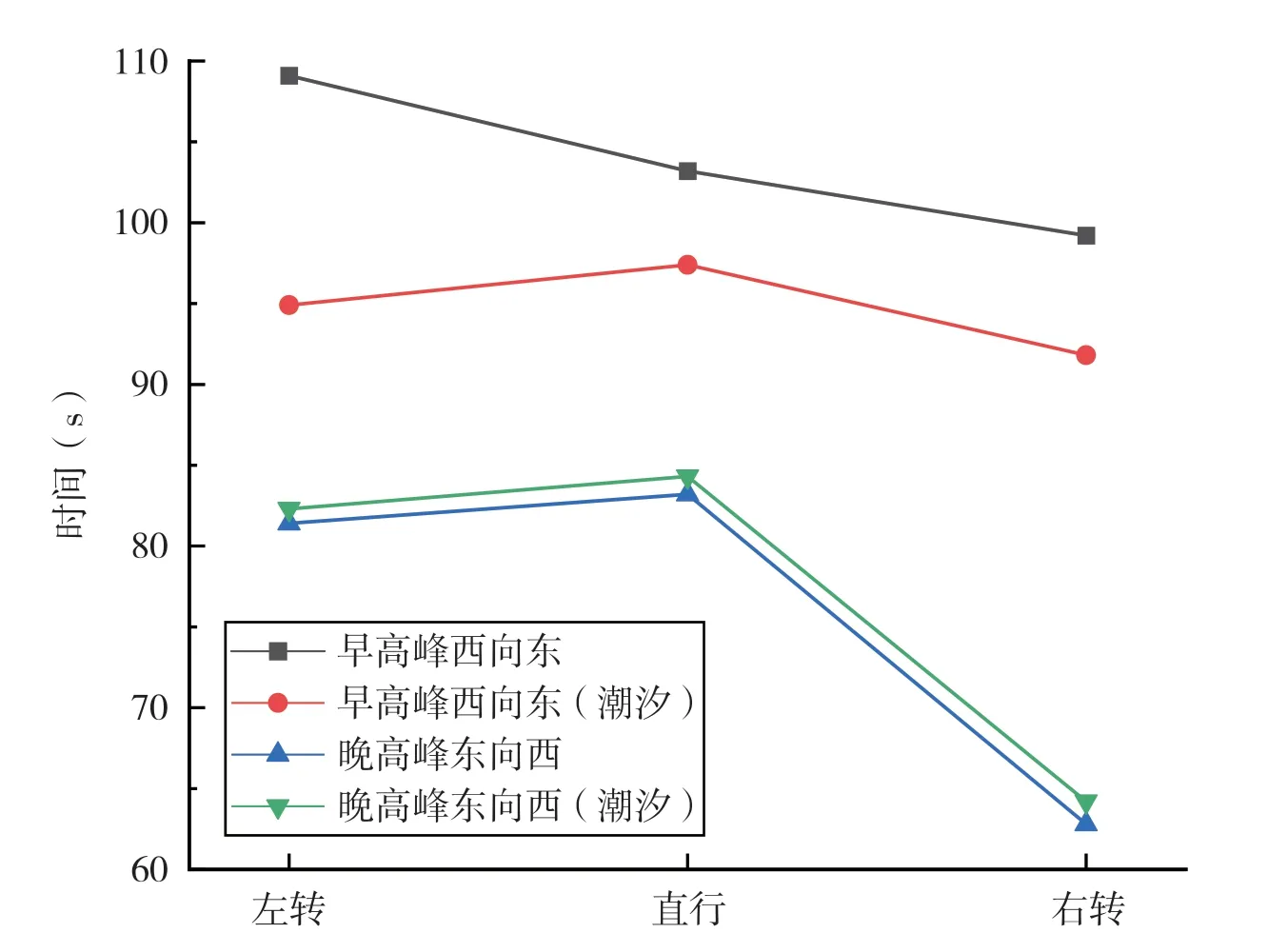
图2 行程时间评价
4 结论
本系统通过单片机控制中心串联,同时将流量数据统计、红外光电接收、显示等功能串联一体,实现了道路变道的自动与手动控制,为道路拥堵情况提供了解决方案。系统的人工干预模式更是为系统提供了更多可以选择的方案,当自动模式出现故障或者当现实中出现一些突发情况的时候,人工干预模式会有效地增加系统的安全性和稳定性。
猜你喜欢
凤凰动漫(军事大王)(2022年9期)2022-11-05 03:15:08
幽默大师(漫话国学)(2020年6期)2020-12-29 08:45:20
时代邮刊(2019年18期)2019-07-29 08:49:24
自动化学报(2019年6期)2019-07-23 01:18:36
VOGUE服饰与美容(2019年6期)2019-07-17 07:55:01
晚晴(2018年4期)2018-12-07 04:52:06
电子制作(2018年1期)2018-04-04 01:48:14
现代营销(创富信息版)(2018年5期)2018-02-21 00:54:14
电子制作(2017年9期)2017-04-17 03:00:56
制造业自动化(2017年2期)2017-03-20 14:26:08