
激光雷达技术在叶面积指数提取中的研究进展
2023-07-31 16:08:14丁铭铭包广道刘婷禹东彬林灿姜雪菲翟畅
安徽农业科学 2023年13期
丁铭铭 包广道 刘婷 禹东彬 林灿 姜雪菲 翟畅
摘要 叶面积指数(LAI)是观测植被生态的重要参数之一,快速、精准获取大尺度的LAI对发展精准林业至关重要。激光雷达技术(LiDAR)能够准确探测植被空间和地形的三维结构,特别是对植被垂直信息分布的获取,具有传统光学遥感技术无法比拟的优势,在森林参数的测量与反演上已经取得了成功的应用。介绍了激光雷达技术原理、传统测量LAI的技术方法及LiDAR反演LAI的优势,重点分析了LiDAR反演LAI的关键技术研究和LiDAR在反演LAI应用中的研究进展,并对LiDAR存在的问题和未来的发展趋势进行了分析总结。
关键词 叶面积指数;星载激光雷达;机载激光雷达;地基激光雷达;激光雷达处理技术
中图分类号 S771.8 文献标识码 A 文章编号 0517-6611(2023)13-0001-07
doi:10.3969/j.issn.0517-6611.2023.13.001
Research Progress of Lidar Technology in Leaf Area Index Extraction
DING Ming-ming1,2,BAO Guang-dao2,LIU Ting2 et al
(1.Changchun University,Changchun,Jilin 130022;2.Jilin Academy of Forestry Science,Changchun,Jilin 130031)
Abstract Leaf area index (LAI) is one of the important parameters for observing vegetation ecology,how to quickly and accurately obtain large-scale LAI is crucial to the development of precision forestry. Light Detection And Ranging (LiDAR) can accurately detect the three-dimensional structure of vegetation space and terrain,especially the acquisition of vertical information distribution of vegetation, has incomparable advantages over traditional optical remote sensing technology,it has been successfully applied in the measurement and inversion of forest parameters.This paper introduces the principle of lidar technology, traditional measurement LAI techniques and advantages of LiDAR LAI inversion,the key techniques of LiDAR LAI inversion and research progress of LiDAR in LAI inversion were analyzed.Finally, the existing problems and future development trends of LiDAR are analyzed and summarized.
Key words Leaf area index;Terrestrial laser scanning;Airborne laser scanning;Spaceborne laser scanning;Lidar technology
基金項目 吉林省自然科学基金项目(YDZJ202201ZYTS446);吉林省发改委创新能力建设项目(2021C044-9);吉林省科技发展计划项目(YDZJ202102CXJD046);吉林省自然科学基金项目(202201-01315JC);吉林省科技厅重点研发项目(20230202098NC);吉林省科技发展计划项目(20200602006ZP)。
作者简介 丁铭铭(1998—),男,吉林四平人,硕士研究生,研究方向:森林生态。
通信作者,讲师,从事森林生态研究。
收稿日期 2022-12-30;修回日期 2023-02-21
叶面积指数(leaf area index,LAI)是定量表征植物冠层结构的重要参数,在衡量宏观森林健康状态、估算森林生态参量等方面具有关键作用[1]。研究表明,LAI对植被的光合、呼吸以及碳循环等生物物理过程存在决定影响[2],通过LAI的异质性差异及变化规律,能够反映森林的生态条件,植物的生长趋势、状态,并以此评价森林光照、水分、土壤、植物之间能量的平衡状况。因此,准确、快速、宏观地获取森林LAI空间分布格局及其周期性变化态势,对准确还原森林碳水循环过程、探测扰动因子位置及程度、评估森林生态服务功能具有重大意义。
叶面积指数这一概念最早由英国作物学家Watson在20世纪40年代提出[3],当时被定义为“单位面积土地上单面植被光合作用的综合”[4]。但由于只考虑了叶片平整的情况,对叶片特性描述欠缺合理性,难以体现叶片的结构作用,局限性较大[5]。在此之后的近80年里,很多学者提出了新的定义,大致可以分为4种:①地表单位面积上冠层叶片垂直投影到水平面上的面积总和[6]。但这一定义忽略了植被冠层叶倾角不同的问题。②地表单位面积上冠层叶片垂直投影到水面上的最大投影面积[7]。该定义会因消光系数而使结果受影响。③单位地面面积总截面积的一半[8]。该定义只适合非平面的叶子。④地表单位面积上总叶片表面积的一半[9]。该定义考虑了多个方面,可以用于各种树种,包括针叶的不规则形状,是目前接受度最高、应用最广泛的定义。值得注意的是,以上不同的定义都有其本身意义,所以使用不同的定义去计算LAI会导致计算结果存在着较大差异[2],应用者需依据研究目的选择合适的定义。
目前,针对叶面积指数的测定方法很多[10-11],但均受不同条件的限制。仍然没有一项技术可以在无损的情况下实现对LAI的精准测量,而激光雷达作为一种新型的主动遥感技术,不仅能够直接、快速、精准地获取研究对象的三维结构坐标信息,还具备对植被的空间结构和地形的侦测功能,尤其是对森林高度和垂直结构的检测能力,是传统光学遥感无法比拟的[12]。因此,通过激光雷达获取森林结构的精确三维点云信息,再对点云数据进行处理、分析,可以有效地估测森林的垂直结构信息以及植被的冠层信息等,既提高了叶面积指数估算的准确性,也避免了叶面积指数估测中存在的饱和效应。
该研究通过整理国内外激光雷达技术的发展及分类、LAI的测量方法、激光雷达数据的处理方法,梳理了激光雷达技术在叶面积指数反演研究中的发展脉络,包括现有的点云的去噪、分类技术等,并在此基础上,归纳了当前仍存在的技术问题,对未来激光雷达技术在LAI测量方面的应用提出了展望,旨在对未来开展高精度LAI测定研究以及区域高分辨率叶面积指数产品生产提供参考。
1 激光雷达技术
激光雷达技术(light detection and ranging,LiDAR)是一种新型主动探测与测距技术。相比于传统雷达,它结合了激光技术和雷达技术,具有分辨率高、易携带、探测能力强等优点。而且不受地面回波的影响,具有微小物体探测能力[13]。自20世纪60年代问世以来,已经被诸多领域广泛应用[5]。直到20世纪80年代,有研究人员尝试将LiDAR用于获取三维点云数据上,结果达到了传统技术难以达到的高度,尤其是对目标细节的获取更是传统技术无法比拟的[10]。此后,LiDAR也成为诸多行业的热门研究。
1.1 激光雷达技术的原理
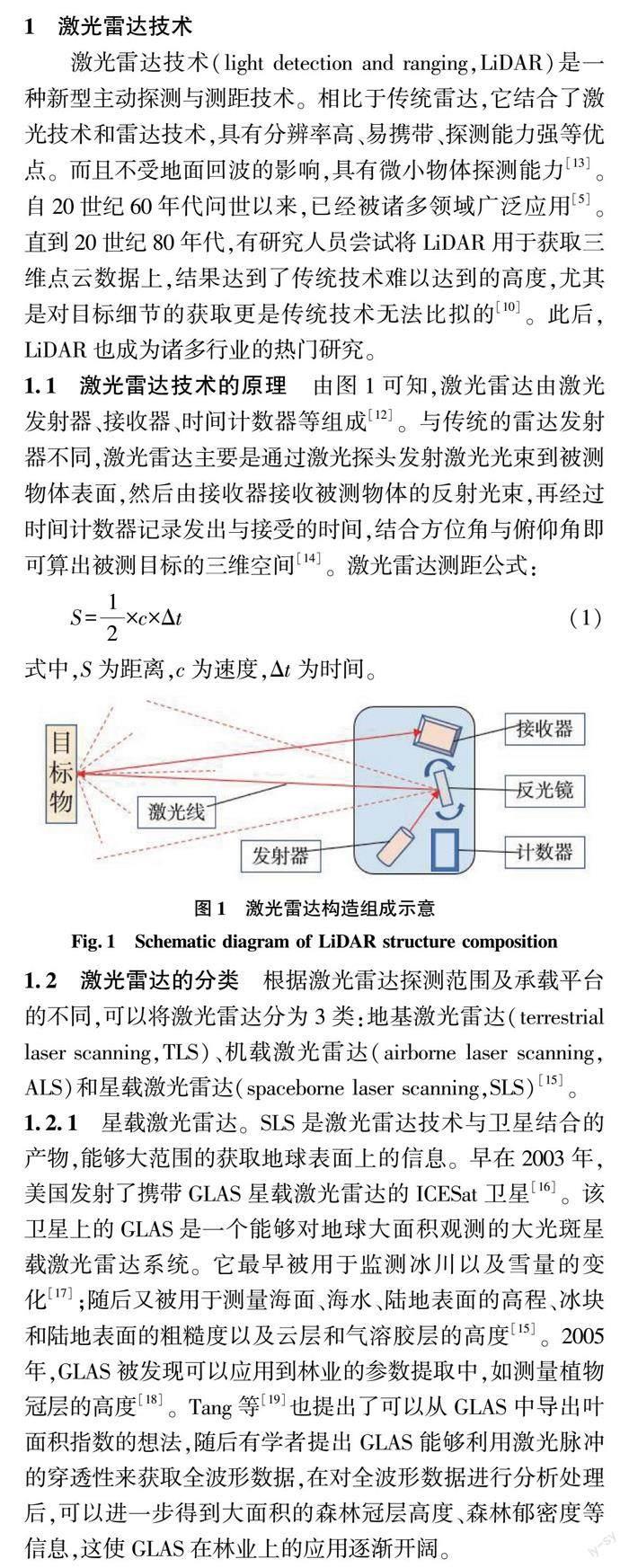
由图1可知,激光雷达由激光发射器、接收器、时间计数器等组成[12]。与传统的雷达发射器不同,激光雷达主要是通过激光探头发射激光光束到被测物体表面,然后由接收器接收被测物体的反射光束,再经过时间计数器记录发出与接受的时间,结合方位角与俯仰角即可算出被测目标的三维空间[14]。
激光雷达测距公式:
S=12×c×Δt(1)
式中,S为距离,c为速度,Δt为时间。
1.2 激光雷达的分类
根据激光雷达探测范围及承载平台的不同,可以将激光雷达分为3类:地基激光雷达(terrestrial laser scanning,TLS)、机载激光雷达(airborne laser scanning,ALS)和星载激光雷达(spaceborne laser scanning,SLS)[15]。
1.2.1 星载激光雷达。
SLS是激光雷达技术与卫星结合的产物,能够大范围的获取地球表面上的信息。早在2003年,美国发射了携带GLAS星载激光雷达的ICESat卫星[16]。该卫星上的GLAS是一个能够对地球大面积观测的大光斑星载激光雷达系统。它最早被用于监测冰川以及雪量的变化[17];随后又被用于测量海面、海水、陆地表面的高程、冰块和陆地表面的粗糙度以及云层和气溶胶层的高度[15]。2005年,GLAS被发现可以应用到林业的参数提取中,如测量植物冠层的高度[18]。Tang等[19]也提出了可以从GLAS中导出叶面积指数的想法,随后有学者提出GLAS能够利用激光脉冲的穿透性来获取全波形数据,在对全波形数据进行分析处理后,可以进一步得到大面积的森林冠层高度、森林郁密度等信息,这使GLAS在林业上的应用逐渐开阔。
1.2.2 机载激光雷达。
ALS是目前主流的一种主动遥感技术,它是由激光、全球定位系统(GPS)以及惯性导航系统(INS)组成的[20]。它不仅能够快速、精准地获取地面上的三维信息,并且还具有穿透性,可以穿透林分冠层并获得高精度的森林冠层以及林分内部结构信息。与传统摄影相比,ALS不受日光条件的限制,即使在夜晚也能不停作业,因此,在20世纪末迅速发展起来,并已经被应用到地形考察、林业调查、道路规划等各个领域[21],进入21世纪,在林业上的应用也逐渐变得成熟、完整,庞勇等[22]利用机载激光雷达提取出林分的平均树高;付甜等[23]利用机载激光雷达估测出森林生物量等。
1.2.3 地基激光雷达。
TLS技术产生于20世纪90年代[2],是传统雷达与现代激光技术结合的产物,通过位置、距离、角度等观测数据直接获取目标表面点的三维坐标[5],使其在高精度三维冠层信息的实时获取方面有极大的优势,并且可以高效地建立起被测物的三维模型。TLS起初更多地被应用于地形的勘测、文物保护、建筑物建模等方面[24],而在2002 年,Lefsky等[25]首次提出地基激光雷达可无破坏地获取森林的三维结构,尤其是垂直结构信息,TLS在林业内得到飞速地发展。
2 传统的叶面积指数测定
近年来,随着国际社会对全球变暖的关注度不断提升,针对植被碳水循环模型的研究逐渐深入,作为定量刻画植被冠层特征的关键指数之一,准确获取不同尺度LAI具有重要意义,使得针对LAI测定的研究逐渐增加,推进了LAI测定的发展。由于LAI的重要性及准确获取的困难性,使如何高精准地测定LAI成为研究的热门。传统的叶面积指数的测量方法大致可分为直接法与间接法[2]。
2.1 直接测量法
直接测量法是一种经典成熟的测量LAI的方法,主要是指通过测量仪器与手動测量目标对象部分叶片的表面积,在根据公式计算出叶面积指数。直接测量法具体分为:
①直接收获法,该方法是直接收获植物的叶片,并将其烘干称重,在通过测量出叶片的表面积,最后计算得出LAI[6]。
②异速生长方程法,该方法是2003年Bréda[26]提出的,主要通过建立 LAI 与树高、胸径的关系,再根据叶的比叶面积来估算 LAI。
③凋落物法,在针阔混交林样地中放收集网收集落叶,并称其叶片的干重,再通过测量其表面积,计算得出LAI[27]。
④破坏性采样法,此方法是典型的破坏性收集叶片的方法,它通过选取目标样地中有代表性的树木,对其叶片进行分层采样、计算LAI,以代表整个样地[20]。
直接测量的各个方法虽然有所差异,但本质上都是完全的人工测量,过程烦琐而且复杂,所以只适合用在单株或样地水平上的测量。而且在测量的过程中不仅需要耗费大量的人力物力,对植物更具有一定的破坏性,所以直接测量法更多是被用于间接方法的验证[28]。
2.2 间接测量法
间接测量法指的是无破坏地收集目标数据,再根据收集到的数据进行分析、计算,进而推出叶面积指数的一种方法。该方法不仅可以高效、无破坏地获取LAI,而且还能够用于检测不同类型森林的LAI的季节动态变化[8]。光学仪器法是目前使用最广泛的间接测量LAI的方法,主要分为:
①半球摄影法,半球摄影法是通过数码相机从底向上拍摄植被,对得到的图像进行处理、计算,得到冠层的间隙率,进而计算LAI的一种方法。该方法的关键在于提取的间隙率精度,精度越高,LAI越准确[28]。
②LAI-2200c植物冠层分析法,LAI-2200c通过测量冠层上下方的太阳辐射强度可以直接获取冠层的间隙率信息,这种方法相比于半球摄影速度更快,但受天气的影响较大[27]。
③TRAC冠层辐射分析仪,它通过记录太阳光线穿过植被冠层的过程,得出冠层孔隙率以及分布,进而计算出LAI[1]。
④HemiView 冠层分析仪,该方法与半球摄影法的原理相似,不同的是該方法可以收集彩色图像进行数据处理,进而得到LAI[29]。
然而,间接测量法虽然可以快速获取LAI,但是由于天顶角、木质部、聚集指数等因素的影响[30],导致测量结果会产生一定的误差,如罗光浪等[20]采用半球摄影与LAI-2200c对不同林龄的马尾松人工林估测LAI,结果显示半球摄影法测定的LAI平均低估50%,LAI-2200测定值低估41%,所以间接测量结果不能被定义为实际值,而是有效值[31]。
传统测量方法固然有很多,但却始终无法满足LAI测定的需求,而激光雷达的出现使LAI的测量有了新的方向。激光雷达技术作为一种主动的遥感技术,也属于间接测量法中的一种,它通过获取植被的精准三维信息,可以有效地评估树冠特征、植被的垂直结构信息,不仅提高了叶面积指数估算的准确性,也避免了叶面积指数较高树冠的饱和效应。
3 激光雷达反演叶面积指数的关键技术
在使用激光雷达收集数据时,特别是在野外的天然林,森林中有很多的昆虫、鸟类和其他非目标物也会被收集,同时林中的地形不一也会影响最终结果。因此,有必要对采集的点云数据进行预处理,以获得高精度的模型。在激光雷达的发展进程中,点云数据的处理方法不断更新和改进,旨在更快、更准确地提取森林参数。其中最为关键的就是点云的配准、去噪以及分类技术。
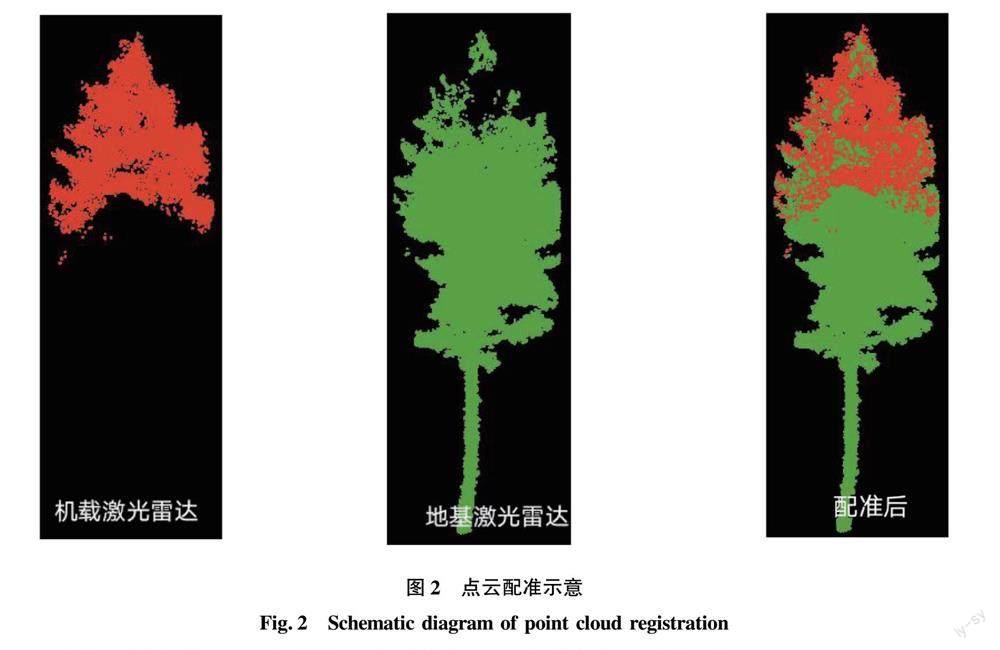
3.1 点云的配准
在激光雷达扫描样地的过程中,由于植被之间相互遮挡以及扫描仪器扫描范围的限制,会造成扫描信息的缺失。因此,为了获得完整的目标样地,需要从不同的角度对样地进行多次扫描,然后将多次扫描的数据进行组合,形成完整的目标样地,该过程就被称作配准(图2)。点云的配准尤为关键,匹配不准确会直接影响最终的结果。Besl等[32]在1992年首次提出了一种高层次的基于自由形态曲面的配准方法,即迭代最近点法(iterativeclosestpoint,ICP),它是一种精确配准算法。该算法的配准精度和运行速度取决于点云的初始位姿和数量大小,在初始位姿相近且点数数量少时,ICP的算法就越精准和快速,反之,则计算时间较长。随后又有一些学者在此基础上相继提出了EM-ICP算法[33]、基于特征点的ICP算法[34]、基于主成分分析法的ICP算法等[35],使ICP算法不断发展与优化,但配准速率与精度仍有不足。直到2020年,杨玉泽等[36]提出了基于特征直方图的初始配准与正态分布变换(normal distributions transform,NDT)精确配准相结合的配准方法,并与ICP、NDT、FPFH-ICP做比较,结果显示FPFH-ICP精确度最高,NDT算法运行速度最快,FPFH-NDT综合情况最优。
3.2 点云的去噪
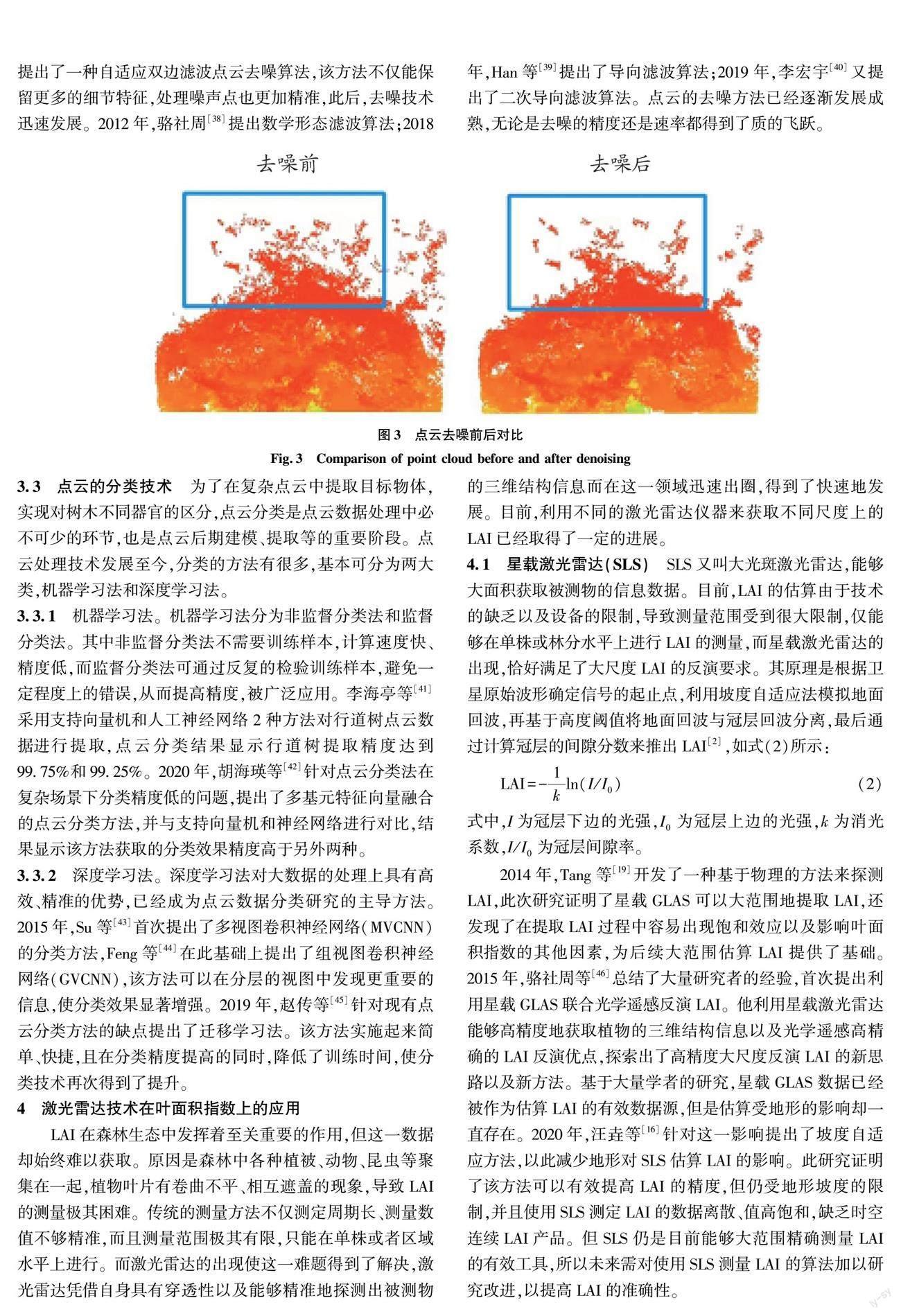
在使用激光雷达对目标数据进行采集的过程中,由于环境和自身的影响,如激光雷达扫描仪的声音、天空中突然飞过来的鸟、森林中昆虫的叫声等因素,都会成为扫描过程中不可控的噪声点,噪声点一般为孤立点,通常会明显高于地面或者物体。这些噪声点的存在会极大地影响试验的结果,因此为了保证后续三维点云的建模,需要对这些不应该存在的噪声点进行处理。这个过程也称为点云去噪或点云滤波(图3)。
学者提出了不同的点云去噪方法,以便能够更好地处理点云数据。有研究者提出了中值滤波的去噪算法,该方法是通过影像的处理技术来实现点云的去噪,但只适用于有序点云的去噪,并且在去噪的同时,对点云的有用信息也会造成丢失。此后,越来越多的学者进行了试验,但点云噪声点的自动识别和完全去除还没有取得很大的进展,肖国新等[37]提出了一种自适应双边滤波点云去噪算法,该方法不仅能保留更多的细节特征,处理噪声点也更加精准,此后,去噪技术迅速发展。2012年,骆社周[38]提出数学形态滤波算法;2018年,Han等[39]提出了导向滤波算法;2019年,李宏宇[40]又提出了二次导向滤波算法。点云的去噪方法已经逐渐发展成熟,无论是去噪的精度还是速率都得到了质的飞跃。
3.3 点云的分类技术
为了在复杂点云中提取目标物体,实现对树木不同器官的区分,点云分类是点云数据处理中必不可少的环节,也是点云后期建模、提取等的重要阶段。点云处理技术发展至今,分类的方法有很多,基本可分为两大类,机器学习法和深度学习法。
3.3.1 机器学习法。
机器学习法分为非监督分类法和监督分类法。其中非监督分类法不需要训练样本,计算速度快、精度低,而监督分类法可通过反复的检验训练样本,避免一定程度上的错误,从而提高精度,被广泛应用。李海亭等[41]采用支持向量机和人工神经网络2种方法对行道树点云数据进行提取,点云分类结果显示行道树提取精度达到99.75%和99.25%。2020年,胡海瑛等[42]针对点云分类法在复杂场景下分类精度低的问题,提出了多基元特征向量融合的点云分类方法,并与支持向量机和神经网络进行对比,结果显示该方法获取的分类效果精度高于另外两种。
3.3.2 深度学习法。
深度学习法对大数据的处理上具有高效、精准的优势,已经成为点云数据分类研究的主导方法。2015年,Su等[43]首次提出了多视图卷积神经网络(MVCNN)的分类方法,Feng等[44]在此基础上提出了组视图卷积神经网络(GVCNN),该方法可以在分层的视图中发现更重要的信息,使分类效果显著增强。2019年,赵传等[45]针对现有点云分类方法的缺点提出了迁移学习法。该方法实施起来简单、快捷,且在分类精度提高的同时,降低了训练时间,使分类技术再次得到了提升。
4 激光雷达技术在叶面积指数上的应用
LAI在森林生态中发挥着至关重要的作用,但这一数据却始终难以获取。原因是森林中各种植被、动物、昆虫等聚集在一起,植物叶片有卷曲不平、相互遮盖的现象,导致LAI的测量极其困难。传统的测量方法不仅测定周期长、测量数值不够精准,而且测量范围极其有限,只能在单株或者区域水平上进行。而激光雷达的出现使这一难题得到了解决,激光雷达凭借自身具有穿透性以及能够精准地探测出被测物的三维结构信息而在这一领域迅速出圈,得到了快速地发展。目前,利用不同的激光雷达仪器来获取不同尺度上的LAI已经取得了一定的进展。
4.1 星载激光雷达(SLS)
SLS又叫大光斑激光雷达,能够大面积获取被测物的信息数据。目前,LAI的估算由于技术的缺乏以及设备的限制,导致测量范围受到很大限制,仅能够在单株或林分水平上进行LAI的测量,而星载激光雷达的出现,恰好满足了大尺度LAI的反演要求。其原理是根据卫星原始波形确定信号的起止点,利用坡度自适应法模拟地面回波,再基于高度阈值将地面回波与冠层回波分离,最后通过计算冠层的间隙分数来推出LAI[2],如式(2)所示:
LAI=-1kln(I/I0)(2)
式中,I为冠层下边的光强,I0为冠层上边的光强,k为消光系数,I/I0为冠层间隙率。
2014年,Tang等[19]开发了一种基于物理的方法来探测LAI,此次研究证明了星载GLAS可以大范围地提取LAI,还发现了在提取LAI过程中容易出现饱和效应以及影响叶面积指数的其他因素,为后续大范围估算LAI提供了基础。2015年,骆社周等[46]总结了大量研究者的经验,首次提出利用星载GLAS联合光学遥感反演LAI。他利用星载激光雷达能够高精度地获取植物的三维结构信息以及光学遥感高精确的LAI反演优点,探索出了高精度大尺度反演LAI的新思路以及新方法。基于大量学者的研究,星载GLAS数据已经被作为估算LAI的有效数据源,但是估算受地形的影响却一直存在。2020年,汪垚等[16]针对这一影响提出了坡度自适应方法,以此减少地形对SLS估算LAI的影响。此研究证明了该方法可以有效提高LAI的精度,但仍受地形坡度的限制,并且使用SLS测定LAI的数据离散、值高饱和,缺乏时空连续LAI产品。但SLS仍是目前能够大范围精确测量LAI的有效工具,所以未来需对使用SLS测量LAI的算法加以研究改进,以提高LAI的准确性。
4.2 机载激光雷达(ALS)
ALS是目前被应用到叶面积指数反演最多的一项主动技术。机载激光雷达又称小光斑激光雷达,与星载激光雷达不同的是,它能够忽视地形,更加准确地收集目标数据,并且能够穿过冠层,获得更精准地目标三维结构,虽然范围相比有所限制,但是能够更加准确地反演出LAI(图4)。机载激光雷達通过发射激光扫描植被信息,在穿过冠层时,一部分激光能量反射回来,另一部分激光能量会通过冠层间隙直至地面,进而计算出间隙率[47],从而推算出LAI。其中间隙率是由比尔朗伯定律表示的:
P(θ)=e-G(θ)·LAI/cosθ(3)
式中,P(θ)为天顶角θ的冠层间隙率,G(θ)为单位植物面积投影到垂直于角度θ方向。
2016年,刘婷等[48]尝试机载激光雷达应用于农业上的LAI测定,以玉米为研究对象,成功研究出了适用于中等高度的农作物的LAI反演的方法,并将结果与实际值做对比,误差均小于10%。2021年,Song等[49]使用机载激光雷达成功精准地测定出温带混交林的LAI,并且精度达到了传统间接法难以达到的高度。机载激光雷达发展至今,大量的研究都表明了它在LAI反演中的实用性与准确性,不过目前的反演方法与技术还存在诸多的争议,例如,很多研究者发现在使用机载激光雷达反演LAI时,冠层以下的结构信息会获取不全,并且结果的精度也会受飞行的高度、扫描的范围、角度的影响[47]。而且不同的林分、农作物等LAI的反演方法也有所不同,目前机载激光雷达反演叶面积指数的方法包括2种,一种是经验模型反演法,一种方法是基于比尔朗博定律物理模型法[30],后者是在经验模型反演的基础上实现的,它不仅弥补了经验模型法的弊端,还被挖掘出了巨大的潜力,所以该方法也被广泛应用,但需要注意的是,不同的林分仍然不可以通用该方法[23]。
4.3 地基激光雷达(TLS)
TLS近年才开始应用到LAI的反演当中,相比星载激光雷达、机载激光雷达,地基激光雷达最适用于LAI的反演,原因在于它能够准确探测林分的三维结构以及垂直结构,尤其是在森林的垂直结构的探测上具有巨大的优势[25],机载虽然也能穿过树冠探测到垂直结构,但遇到树干、聚集叶片等遮挡,垂直结构仍有缺失,地基激光雷达则在很大程度上避免了该问题(图5)。TLS中最常用是手持激光雷达和背包激光雷达,两者不同于其他TLS,如在采20 m×20 m的数据时,单人5~10 min就能够完成,并且无须后续拼接就能形成完整的地块[50],是其他TLS无可比拟的。利用TLS提取LAI是根据计算激光束与植被冠层的接触频率,公式为:
N(s)=n1(s)/na(s)(4)
式中,N(s)为第s层激光的接触频率,n1为第s层的激光点的网格数量,na为第s层的三维网格数量。然后再根据第s层的接触频率计算该层的LAI:
L(s)=α(θ)×N(s)(5)
式中,α(θ)为叶片倾斜度校正因子,一般为1.1。最后将所有层的LAI进行累加,即得到区域内的LAI:
LAI=ss=1L(s)=1.1×ss=1n1(s)na(s)(6)
自2002年Lefsky等[25]首次发现了地基激光雷达在LAI反演中具有巨大优势以来,大量的学者也投入到了地基激光雷达反演LAI的研究当中,截至目前,地基激光雷达在LAI的测定中也有了一定的研究成果,同时在研究过程中也发现了诸多问题。巴比尔江·迪力夏提等[9]使用地基激光雷达测定胡杨的LAI,研究证明地基激光雷达能够实现快速获取植被的三维以及垂直结构信息,但由于叶片间的相互遮挡,获取的点云信息仍会出现缺失;2021年,黄兰鹰等[5]利用地基激光雷达对毛竹林LAI进行提取,并且评估了噪音与体元大小对LAI的影响,试验最终表明,有效的去噪以及合适的体素大小会提高LAI的精度;杨玉泽[36]利用地基激光雷达对常绿树种的LAI进行反演,并使用不同的算法来计算LAI,结果发现不同的算法得到LAI不尽相同,因此,不同树种选择合适的算法来计算LAI更加准确。地基激光雷达在LAI的反演中虽然存在很多问题,但对目标物的数据采集却是现代技术的前沿,随着研究的推进,后期点云数据的一些处理问题将得以有效解决,未来TLS将会被更加广泛地应用于LAI的反演。
5 存在问题
激光雷达技术已经越来越成熟,尤其是在LAI反演的应用上,学者们早以不再局限于传统的方法,而是进入了三维时代,激光雷达技术不仅能够满足LAI指数提取的需要,而且相比于传统测量,完全不需要特定的时间以及特定的天气就能够收集大量精准的森林三维数据。但在激光雷达技术的处理上,目前仍存在很多难点。例如,大量的研究[9,23-24,38]发现,现在的技术仍不能满足激光雷达收集的点云数据后期的处理,并且,在LAI反演中的叶倾角、聚集指数以及体素大小等影响因素也难以彻底解决,虽然激光雷达技术是目前最先进的探测技术,但在LAI的反演中受木质部及叶片间相互遮挡的影响仍会出点云丢失的现象。
5.1 点云的分类体系有待完善
目前的点云分类技术有很多种方法,但大都是种类间的区分(表1),植物、街道、建筑物的区分,更细化也只能达到植物中低矮植物与高等植被的区分,而对于需要更加细化的分类却难以达到,如木质部与叶片的区分、不同树种的区分等。
5.2 点云的去噪精度有待提高
点云的去噪方法在不断更新、优化,去噪的效果也更加精细化,但值得注意的是目前仍然没有一个完整而统一的去噪体系可以应用于各种林型。
5.3 自动化木质部的提取技术有待研发
如今的木质部的提取都建立在单木的基础上,对于细枝的处理仍不完全,尤其是针叶树种,更是无法准确地提取出一棵树的完整木质部。而对于区域植被木质部的提取更加不准确,并且只能提取出有缺失的树干。
5.4 区域森林参数的提取精度有待提升
在区域水平上,利用一些点云处理软件在对点云进行预处理以后,针对大范围的树木参数的提取结果误差仍然与实际差值较大,不能够应用到实际。
6 激光雷达技术在LAI测量中的展望
6.1 促进多平台LiDAR数据整合优化
受不同LiDAR平台获取信息角度及激光传统能力的限制,无论是使用SLS、ALS还是TLS,对目标物的扫描信息都有丢失的现象发生。对此通过整合地基与机载激光雷达的点云数据,并打通SLS與其他2种平台的尺度壁垒,能够使目标的三维结构信息得到有效互补,取得针对森林冠层的多尺度、高精度空间细节特征,这种SLS、TLS、ALS的结合将会给未来森林LAI的获取带来新的思维模式。
6.2 探索光谱特征与雷达点云数据融合
与其他地物不同,植被的生长所依赖的光合作用导致植被叶片具有独特的光谱特征,并且在光学遥感领域得到了深度的应用,但目前针对LiDAR点云的研究多集中在三维空间内的位置信息的整合与提取。随着携带RGB相机的新型激光雷达出现[10],空间点云已经能够携带XYZ以外的少量光谱特征,研发融合空间和光谱特征的点云分类技术,获取更为精细的树木各类型器官的空间信息,将对林学和生态方向的科学研究产生重要影响。
6.3 建立LiDAR在林业领域标准化技术
目前LiDAR技术在国内尚处于新兴阶段,虽然已经涌现了诸多应用的成功案例[12],但距产生行业影响仍有巨大差距。其原因除LiDAR设备成本较高外,规范化的作业流程和完善的技术细节要求缺失均影响着LiDAR的大规模应用,未来随着LiDAR设备普及程度提高,林业工作中丰富的应用场景和长周期标准化的数据需求,势必会推动相关技术规范和行业标准的出台,并继续推动LiDAR技术在林业行业中的深入发展。
参考文献
[1] 赵传燕,沈卫华,彭焕华.祁连山区青海云杉林冠层叶面积指数的反演方法[J].植物生态学报,2009,33(5):860-869.
[2] FANG H L,BARET F,PLUMMER S,et al.An overview of global leaf area index(lai):Methods,products,validation,and applications[J].Reviews of geophysics,2019,57(3):739-799.
[3] 蒋丽伟,张家琦,赵一臣,等.北京山区典型林分生长季叶面积指数动态变化[J].林业资源管理,2019(2):132-136.
[4] WATSON D J.Comparative physiological studies on the growth of field crops:II.The effect of varying nutrient supply on net assimilation rate and leaf area[J].Annals of botany,1947,11(4):375-407.
[5] 黄兰鹰,郑亚雄,张美曼,等.应用地基激光雷达对毛竹林有效叶面积指数的提取及敏感性分析[J].东北林业大学学报,2021,49(9):67-71,118.
[6] CHEN J M,RICH P M,GOWER S T,et al.Leaf area index of boreal forests:Theory,techniques,and measurements[J].Journal of geophysical research,1997,102(D24):29429-29443.
[7] MYNENI R B,RAMAKRISHNA R,NEMANI R,et al.Estimation of global leaf area index and absorbed par using radiative transfer models[J].IEEE transactions on geoscience and remote sensing,1997,35(6):1380-1393.
[8] 刘志理.东北典型森林叶面积指数的时空动态[D].哈尔滨:东北林业大学,2015.
[9] 巴比尔江·迪力夏提,玉米提·哈力克,艾萨迪拉·玉苏甫,等.应用地基激光雷达数据估算塔里木河下游胡杨叶面积指数[J].东北林业大学学报,2020,48(11):46-50.
[10] 刘斌,张军,鲁敏,等.激光雷达应用技术研究进展[J].激光与红外,2015,45(2):117-122.
[11] 骆社周,王成,张贵宾,等.机载激光雷达森林叶面积指数反演研究[J].地球物理学报,2013,56(5):1467-1475.
[12] 韩婷婷.激光雷达数据在森林垂直结构参数反演中的应用综述[J].北京测绘,2020,34(8):1061-1065.
[13] 李丹,岳彩荣.激光雷达在森林参数反演中的应用[J].测绘与空间地理信息,2011,34(6):54-58.
[14] WULDER M A,BATER C W,COOPS N C,et al.The role of LiDAR in sustainable forest management[J].Forestry chronicle,2008,84(6):807-826.
[15] 岳春宇,郑永超,邢艳秋,等.星载激光遥感林业应用发展研究[J].紅外与激光工程,2020,49(11):105-114.
[16] 汪垚,方红亮,张英慧,等.基于机载LVIS和星载GLAS波形LiDAR数据反演森林LAI[J].遥感技术与应用,2020,35(5):1004-1014.
[17] DEEMS J S,PAINTER T H,FINNEGAN D C.Lidar measurement of snow depth:A review[J].Journal of glaciology,2013,59(215):467-479.
[18] LEFSKY M A,HARDING D J,KELLER M,et al.Estimates of forest canopy height and aboveground biomass using ICESat[J].Geophysical research letters,2005,32(22):1-4.
[19] TANG H,BROLLY M,ZHAO F,et al.Deriving and validating Leaf Area Index(LAI)at multiple spatial scales through lidar remote sensing:A case study in Sierra National Forest,CA[J].Remote sensing of environment,2014,143:131-141.
[20] 罗光浪,何世强,谭伟,等.不同林龄马尾松人工林叶面积指数的测定[J].中南林业科技大学学报,2022,42(2):55-64.
[21] 刘鲁霞,庞勇.机载激光雷达和地基激光雷达林业应用现状[J].世界林业研究,2014,27(1):49-56.
[22] 庞勇,赵峰,李增元,等.机载激光雷达平均树高提取研究[J].遥感学报,2008,21(1):152-158.
[23] 付甜,黄庆丰.基于机载激光雷达数据的森林生物量估测研究进展[J].林业勘查设计,2010(4):86-89.
[24] 张颖,贾炜玮.基于地基激光雷达的落叶松人工林 枝条因子提取和建模[J].应用生态学报,2021,32(7):2505-2513.
[25] LEFSKY M A,COHEN W B,PARKER G G,et al.Lidar remote sensing for ecosystem studies:Lidar,an emerging remote sensing technology that directly measures the three-dimensional distribution of plant canopies,can accurately estimate vegetation structural attributes and should be of particular interest to forest,landscape,and global ecologists[J].BioScience,2002,52(1):19-30.
[26] BRDA N J J.Ground-based measurements of leaf area index:A review of methods,instruments and current controversies[J].Journal of experimental botany,2003,54(392):2403-2417.
[27] 王宝琦,刘志理,戚玉娇,等.利用不同方法测定红松人工林叶面积指数的季节动态[J].生态学报,2014,34(8):1956-1964.
[28] 周星.基于半球冠层摄影法的叶面积指数测量算法研究[D].成都:电子科技大学,2021.
[29] 李慧,陈少雄.基于两种冠层分析仪的桉树叶面积指数测算[J].桉树科技,2014,31(1):16-22.
[30] GEORGE J P,YANG W,KOBAYASHI H,et al.Method comparison of indirect assessments of understory leaf area index(LAIu):A case study across the extended network of ICOS forest ecosystem sites in Europe[J/OL].Ecological indicators,2021,128[2022-09-21].https://doi.org/10.1016/j.ecolind.2021.107841.
[31] 刘婷,陈晨,范文义,等.基于不同空间尺度遥感影像估算 森林叶面积指数的差异[J].应用生态学报,2019,30(5):1687-1698.
[32] BESL P J,MCKAY N D.Method for registration of 3-D shapes[C]//Proceedings of the sensor fusion IV:Control paradigms and data structures.Boston,MA,United States:SPIE,1992.
[33] GRANGER S,PENNEC X.Multi-scale EM-ICP:A fast and robust approach for surface registration[C]//Proceedings of the 7th European conference on computer vision.Copenhagen,Denmark:Springer-Verlag,2002.
[34] 戴静兰,陈志杨,叶修梓.ICP算法在点云配准中的应用[J].中国图象图形学报,2007,12(3):517-521.
[35] 朱新宇,万剑华,刘善伟,等.改进的ICP点云配准算法[J].海洋测绘,2015,35(2):77-79.
[36] 杨玉泽.基于地基激光雷达的树木点云数据处理及三维建模[D].哈尔滨:东北林业大学,2020.
[37] 肖国新,于辉,周晓辉.一种自适应双边滤波点云去噪算法[J].信息技术,2017,41(10):118-120.
[38] 骆社周.激光雷达遥感森林叶面积指数提取方法研究与应用[D].北京:中国地质大学(北京),2012.
[39] HAN X F,JIN J S,WANG M J,et al.Guided 3D point cloud filtering[J].Multimedia tools & applications,2018,77(13):17397-17411.
[40] 李宏宇.激光雷达的点云数据处理研究[D].长春:长春理工大学,2019.
[41] 李海亭,肖建华,李艳红,等.机器学习在车载激光点云分类中的应用研究[J].华中师范大学学报(自然科学版),2015,49(3):460-464.
[42] 胡海瑛,惠振阳,李娜.基于多基元特征向量融合的机载LiDAR点云分类[J].中国激光,2020,47(8):237-247.
[43] SU H,MAJI S,KALOGERAKIS E,et al.Multi-view convolutional neural networks for 3D shape recognition[C]//2015 Proceedings of the IEEE international conference on computer vision.Santiago,Chile:IEEE,2015.
[44] FENG Y F,ZHANG Z Z,ZHAO X B,et al.GVCNN:Group-view convolutional neural networks for 3D shape recognition[C]//2018 IEEE/CVF conference on computer vision and pattern recognition.Salt Lake City,UT,USA:IEEE,2018.
[45] 赵传,张保明,余东行,等.利用迁移学习的机载激光雷达点云分类[J].光学精密工程,2019,27(7):1601-1612.
[46] 骆社周,王成,习晓环,等.星载激光雷达GLAS与TM光学遥感联合反演森林叶面积指数[J].红外与毫米波学报,2015,34(2):243-249.
[47] TIAN L,QU Y H,QI J B.Estimation of forest LAI using discrete airborne LiDAR:A review[J].Remote sensing,2021,13(12):1-17.
[48] 劉婷,苏伟,王成,等.基于机载LiDAR数据的玉米叶面积指数反演[J].中国农业大学学报,2016,21(3):104-111.
[49] SONG J L,ZHU X A,QI J B,et al.A method for quantifying understory leaf area index in a temperate forest through combining small footprint full-waveform and point cloud LiDAR data[J].Remote sensing,2021,13(15):1-17.
[50] ASCHOFF T,THIES M,SPIECKER H.Describing forest stands using terrestrial laser-scanning[J].Int Arch Photogramm Remote Sens Inf Sci,2004,35:237-241.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
汽车观察(2021年8期)2021-09-01 10:12:41
湖南农业大学学报(自然科学版)(2021年3期)2021-07-02 01:48:06
大气科学(2021年1期)2021-04-16 07:34:18
新疆农业科学(2020年1期)2020-02-14 03:22:46
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
农业环境科学学报(2017年2期)2017-03-20 14:57:37
