
飞机电感式接近传感器信号检测技术研究
2023-07-29 11:00赵兴平李赛雷
自动化与仪表 2023年7期
李 洋,赵兴平,李赛雷
(1.海军装备部,西安 710089;2.航空工业第一飞机设计研究院,西安 710089)
当前国内军、民用各类飞机的舱门和起落架系统的位置检测功能主要通过接触式微动开关和电感式接近传感器实现[1]。接触式微动开关存在开关触点易老化、机械寿命低等缺点,逐渐趋于淘汰化。电感式接近传感器是一种可以输出开关量的位置指示与告警设备,由于其工作性能稳定、环境适应性强且可实现非接触式测量和余度设计等优点,广泛应用于现代新型飞机的起落架系统、舱门信号系统等作动机构的位置检测[2]。
本文以电感式接近传感器为对象研究其工作原理和接近特性,根据传感器不同运动方式对接近特性和信号检测精度的影响,探讨传感器靶标的材料选用和布置设计,最后给出了接近传感器在飞机上的一般性安装要求和故障检测方法。
1 电感式接近传感器工作原理
电感式接近传感器按照激励信号和工作原理的不同,可分为涡流耗损式和可变磁阻式。
涡流耗损式的激励信号为交变信号,在金属靶标上会形成一个电涡流,靶标接近或者远离传感器时,形成的涡流变化使得线圈的阻抗发生变化,如图1 所示。

图1 接近传感器工作原理Fig.1 Working principle of proximity sensor
根据法拉第电磁感应定律,当传感器探头线圈通以正弦交变电流i1时,线圈周围空间必然产生正弦交变磁场H1,它使置于此磁场中的被测金属导体表面产生感应电流,即电涡流[3]。与此同时,电涡流i2又产生新的交变磁场H2,H2与H1方向相反,并力图削弱H1。若将金属导体上形成的电涡流等效成一个短路环中的电流,可得到等效电路如图2 所示。
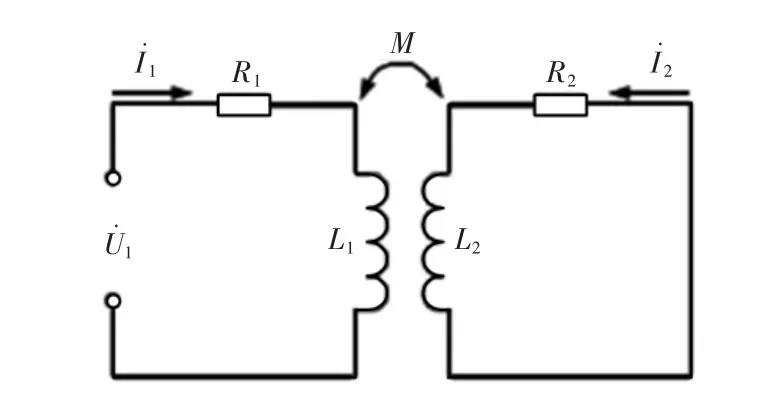
图2 接近传感器工作等效电路Fig.2 Working equivalent circuit of proximity sensor
图2 中R1、L1为传感器探头线圈的电阻和电感,R2、L2为被测导体的电阻和电感。探头线圈和导体之间存在一个互感M,它随线圈与导体间距离的减小而增大。U1为激励电压。
根据基尔霍夫电压平衡方程式得出等效电路的平衡方程为
由此可得传感器线圈的等效阻抗为
依据上述方程组可得接近传感器探头线圈的等效阻抗Z 为
式中:x 为检测距离;μ 为被测体磁导率;ρ 为被测体电阻率;f 为线圈中激励电流频率。
利用靶标接近或者远离传感器时形成的电涡流变化原理,将接近传感器探头线圈等效阻抗Z 随检测距离x 变化的函数关系通过测量电路进行转换,通过接近传感器线圈回路电感L 表征检测距离x的远近进而实现基于接近传感器信号的位置检测。
本文研究的电感式接近传感器均为可变磁阻式,其激励信号为直流信号,一般由远程电子单元提供。接近传感器的信号经远程电子接口单元内部解算后,将接近和远离两种状态处理为离散电平信号并输出给飞机管理计算机,供飞机判断舱门和起落架系统等部位的位置信息。
2 接近传感器特性研究
2.1 接近传感器信号的距离特性研究
电感式接近传感器检测示意图如图3 所示。检测距离和复位距离之间的空间称作回差,检测距离即额定动作距离。在检测距离及检测距离之内接近传感器输出信号衰减,检测到“目标近”;在基准位置及基准位置之外,检到“目标远”。

图3 接近传感器检测示意图Fig.3 Schematic diagram of proximity sensor detection
由接近传感器的工作原理可知,靶标与传感器感应头之间的距离是控制信号开关的唯一外部激励。为便于分析,将这一距离向量分解为X,Z 两个方向的分量,其中X 表示为从靶标前缘到传感器中心轴线的距离,Z 表示为靶标端面与传感器感应头端面之间的距离。
以X 和Z 为基本变量,反映靶标-传感器距离与传感器信号之间关系的就是传感器特性曲线,分别表示触发“接近”和“远离”信号时的2 条边界曲线。
当靶标与传感器的距离位于目标近区域,即Ga曲线以下时,可确保传感器信号被计算机处理后的信息是“接近”;同理当靶标与传感器的距离位于目标远区域,即Gd曲线以上时,可确保传感器信号被计算机处理后的信息是“远离”。电感式接近传感器检测特性如图4 所示。
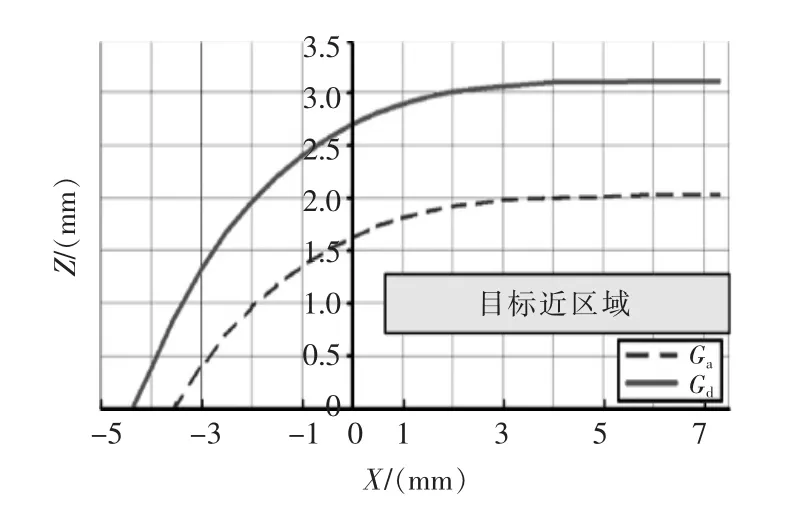
图4 电感式接近传感器特性Fig.4 Inductive proximity sensor characteristics
图4 中,Gd表示“远离”时接近传感器检测面和靶标之间的距离;Ga表示“接近”时接近传感器检测面和靶标之间的距离;“目标近区域”即表示额定检测距离以内满足一定的Z 值时的传感器检测区域。
通常靶标与传感器之间相互靠近的运动方式有直线接近式、相向转动式和径向转动式3 类,不同运动形式的传感器信号特性差异较大。
飞机上接近传感器的安装常用于转动副,一般将接近传感器固定,靶标随移动部件转动,与传感器的接近方式通常有3 种。第1 种方式中,靶标与传感器端面相向运动,使二者端面相“碰触”;第2种方式中,靶标端面与传感器端面相互垂直相切,且之间存在一定间隙;第3 种方式中,靶标相对传感器端面转动,二者之间存在一定间隙。常见的将第1 种运动形式简称为圆周相对运动,将第2 种转动形式称为圆周径向运动,第3 种转动形式简称为圆周相切运动。
由线圈电感变化量公式(6)计算电感L 可知,电感随传感器与靶标间距离增大成衰减趋势,且距离越大,电感值的变化越小,靶标与铁芯气隙长度是非线性的关系,如图5 所示。在微小变化量的情况下可将L-δ 看成近似线性,因此接近传感器只适用于微小距离的测量(<10 mm)。

图5 气隙长度与电感值的特性曲线Fig.5 Characteristic curve of air gap length and inductance value
式中:W 为线圈匝数;Rm为回路 总磁阻;μ0为磁芯的磁导率;S0为气隙截面积;δ 为传感器与靶标的距离。
由图5 可以得出:
所以在气隙长度方面接近传感器的灵敏度为
由线圈电感变化量公式可知,靶标与铁芯气隙截面积是线性的关系,如图6 所示。
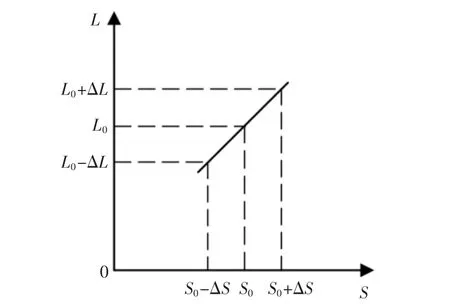
图6 气隙截面积与电感值的特性曲线Fig.6 Characteristic curve of air gap cross-sectional area and inductance value
由图6 可以计算出,在气隙截面积方面接近传感器的灵敏度为
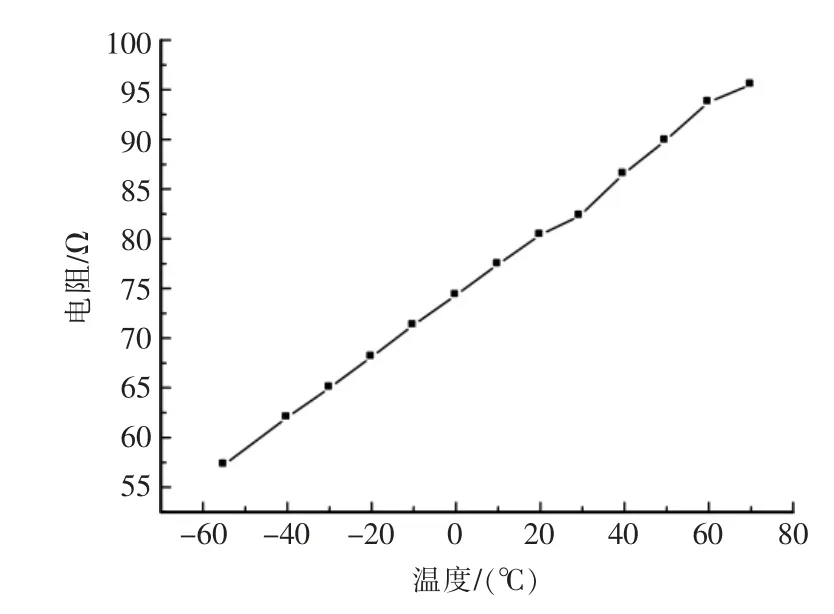
对比K0和K1的关系可以看出,通常情况下K1 研究接近式传感器等效电路参数R、L 随温度的变化情况,通过试验温度从70 ℃降至-55 ℃测量接近传感器的等效电阻和等效电感,试验结果如图7 和图8 所示。 图7 接近传感器电阻随温度变化关系Fig.7 Proximity sensor resistance versus temperature graph 图8 接近传感器电感随温度的变化关系Fig.8 Variation of proximity sensor inductance with temperature 从图7 和图8 结果可知,电阻随温度变化比较明显,而且近似成线性关系,而电感值随温度变化非常的小。接近传感器检测电路也是利用了其电感值在温度变化时相对不变,只随靶标距离改变的特性准确检测靶标位置。 接近传感器在正常没有目标体接近时,传感器内部LC 回路会产生高频振荡,当传感器内部断路时振荡会停止,此时电容两端会被直流稳压电源充电,电压升高后经处理电路可输出断路故障信号;当传感器内部短路时,LC 回路的振荡幅值降低时间较正常情况长很多,根据该特性可设计故障诊断电路实现内部短路自检测[4]。 接近传感器的感应特性与周围环境的材料特性息息相关,其安装支架应选用磁导率接近空气磁导率的材料,这样对传感器周围磁路的影响最小。靶标材料一般应选用铁磁性材料,其相对磁导率远远大于1,磁阻小。 铁磁性材料又分为硬磁性材料和软磁性材料,由于硬磁性材料磁滞损失大且在安装使用过程中剩磁大,会吸附并磁化周围金属,所以应选用铁磁性材料中的软磁材料[5]。不同的软磁材料对感应距离有轻微影响,磁性越强,磁阻越小,感应距离越大;但同时磁性越强又会影响飞机上的电磁环境,所以靶标材料应从导磁系数、机上电磁环境等方面综合考虑,推荐使用PH13-8Mo、17-4PH、15-5PH 等低碳不锈钢材料。而诸如铜、铝、银等非磁性且具有较高导电性的材料对接近传感器的磁场影响很大,不能用于靶标材料,并且此类材料不能置于传感器感应区域附近。 飞机在进行地面试验和功能检查时,希望在机体运动机构不动的工况下检查接近传感器的接近/远离特性,此时需要一个隔离片插入传感器端面与靶标之间隔断接近传感器的磁场,使传感器的输出状态信号由接近变为远离,从而检查传感器接近、远离两种信号转换的正确性。 在接近传感器感应面与靶标之间插入适当的隔离片时,实际会在隔离片表面产生涡流效应,此涡流效应会反作用于接近传感器线圈,使其电感值减小,当其电感值减小到远离状态的电感值时,其状态就由接近状态变为远离状态,实现隔断的功能[6]。 隔离片的隔离效果与隔离片材料的电导率、磁导率、几何尺寸等息息相关。经研究发现隔离片需要选择电导率高、磁导率低的材料,常见金属材料特性数据,如表1 所示,同时考虑便携和经济性等因素,认为铜可作为隔离片的优先推荐材料。 表1 常见金属电导率和磁导率Tab.1 Electrical conductivity and magnetic permeability of common metals 如果靶标材料选用不当或感应区域有除了靶标以外的其它金属材料,会改变传感器感应头部的磁场分布,造成信号干扰严重影响接近传感器感应距离和信号特性。为消除此类干扰,要求接近传感器应具备一定的安装空间,在该安装空间中不允许出现除靶标外其他磁性物体。 从电磁场角度进行研究分析,认为接近传感器通电后产生的磁场可以看做低频交变磁场,其波长λ 约为10E5 数量级,可以将接近传感器通电后产生的磁场类似于一个近场区,其线圈产生的空间磁场强度为 式中:I 为线圈电流;A 为导线等效长度;D 为距离波源的距离。 根据接近传感器实际工况的参数计算出与波源的距离D,即认为在这个距离以外的物体不会影响接近传感器感应特性,将这个距离可视为接近传感器安装的安全距离。 在接近传感器安装布置时,两个传感器轴线之间的距离应或两个感应端面间的距离应当大于安全距离。 接近传感器的特性是微距测量,因此安装支架及靶标的强度和刚度应足够大,以保证接近或远离时的信号特性不受安装支架变形的影响[7]。如果接近传感器安装支架或靶标安装刚度较差,使用过程中形变过大会导致靶标与传感器的相对位置变化过大,造成误报虚警的情况。一般要求安装支架须具有足够的刚度以限制接近传感器和靶标之间的距离的变化不超过开关点间隙的15%,防止由于结构变形而导致误指示。 电感式接近传感器在工程实际应用时应重点考虑靶标及安装支架材料选用、运动形式、安装空间及稳定性等方面因素,同时需结合接近传感器信号的温度特性和故障检测进行设计。接近传感器信号检测技术采用非接触测量原理,其工作可靠、无机械磨损、使用寿命长且抗干扰能力强,在未来飞机系统的位置检测领域将有更加广泛的应用。2.2 接近传感器信号的温度特性研究

2.3 接近传感器信号的故障检测
3 接近传感器及靶标安装布置
3.1 材料选用

3.2 安装空间
3.3 安装稳定性
4 结语
猜你喜欢
大电机技术(2022年4期)2022-08-30
中国特种设备安全(2021年5期)2021-11-06
军民两用技术与产品(2021年10期)2021-03-16
模具制造(2019年7期)2019-09-25
世界农药(2019年3期)2019-09-10
通信电源技术(2018年5期)2018-08-23
光学精密工程(2016年4期)2016-11-07
肿瘤影像学(2015年3期)2015-12-09
电测与仪表(2015年16期)2015-04-12
汽车维护与修理(2015年6期)2015-02-28
