桥梁挠度智能检测设备研究
2023-07-28 07:24:56崔凯华
科学技术创新 2023年18期
崔凯华
(1.辽宁省交通规划设计院有限责任公司,辽宁 沈阳;2.辽宁大通公路工程有限公司,辽宁 沈阳)
桥梁是重要的公共设施,桥梁挠度是桥梁安全性评价的一项重要指标,桥梁挠度检测结果直接影响桥梁养护工作的实施,随着桥梁检测需求的逐年递增,快捷、准确的桥梁挠度检测显得十分必要[1]。传统的桥梁挠度测量方法通常采用百分表、水准仪、全站仪和位移计等,这些相对简单的测量方法一般用于桥梁静挠度测量,存在费时、费力和在线检测困难等不足。近年来出现了一些新型的桥梁挠度检测方法,如倾角仪、加速度计、连通管法、光纤位移传感器或应变仪、光纤陀螺、差分GPS、光电图像法和准直激光束法等这些方法也各有优缺点,不能在多种现场环境下进行广泛的推广应用。
在以上检测方法中,光电图像法依靠其便捷性获得了一定程度的认可[2],并且在市场上涌现出一批光电挠度检测产品,但目前市场同类产品受应用环境影响较大,现场适用性及稳定性不强[3],鉴于目前桥梁数量不断攀升,养护压力逐年增大,亟需提升挠度检测效率及适用性,因此有必要开发一款稳定、可靠、高效、便捷的光电挠度检测设备,以提供更为优质、便捷的桥梁检测服务。
1 基于光电原理的桥梁挠度检测应用
图1 为基于光电原理的桥梁荷载试验过程,检测前需要将挠度检测设备放置在桥下位置,并且需要在桥梁上被检测位置安装靶标,同时需要确保桥梁挠度检测设备可以清晰、无遮挡地拍摄到被检测目标。至此,完成设备的安装布置工作,接下来即可开始向被检测桥梁进行加载,在加载过程中桥梁会出现下挠,而被检测点会出现位移,此时桥梁挠度检测设备通过采集到的目标图片可以实时计算出桥梁的下挠量。

图1 基于光电原理的桥梁荷载试验过程
2 基于深度学习的桥梁挠度检测方法
基于光电原理的挠度检测方法需要实时采集被检测区域的图片,并对此区域的目标位置进行计算,并得到准确的挠度值。现有的光电挠度检测设备所采用的目标定位跟踪原理运用计算图形相似度的方法,此方法要求操作人员在检测准备阶段框选被检测目标,检测过程中,设备处理器会实时计算先后两张照片中被框选目标的相似度,再配合亚像素算法即可得到精确的挠度值。但在桥梁挠度检测过程中,此检测方法的稳定性较差。桥梁荷载试验属于野外检测,外界环境复杂多变,可能出现的干扰包括环境光线的变化、异物的暂时性遮挡、震动干扰等[4],对于基于相似度匹配的目标定位跟踪方法来说,当环境光线变化或者有临时的异物遮挡,都会严重影响到设备的目标定位跟踪效果,严重情况下会导致目标丢失,无法进行检测。
3 系统架构
桥梁挠度检测设备的硬件系统主要由主控板卡、相机镜头、液晶屏、电池、壳体以及靶标组成,其设备组成结构如图2 所示。桥梁挠度检测设备的主要功能是实时采集被检测目标的图像信息,并将此信息传输至主控板卡进行处理,实时计算出被检测点的挠度信息,为了更加准确地检测挠度信息,可以采用专用的靶标辅助挠度检测,将靶标安装于被检测点,主控板卡通过计算可以实时定位跟踪到靶标的位置坐标,并且计算出精确的挠度信息,显示到液晶屏幕上,同时也可通过无线通信系统,将检测到的挠度值上传给服务器进行处理。
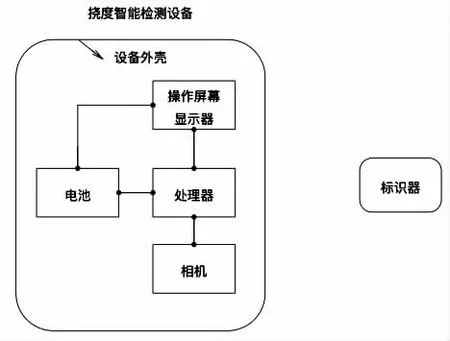
图2 桥梁挠度检测设备组成
4 硬件选型
4.1 相机及镜头
工业相机的主要作用是实时采集图像信息,将采集到的图像信息转换为数字信号,通过数据线上传给图像处理板卡,在桥梁挠度检测系统中工业相机以及镜头的选型至关重要,相机的靶面大小以及镜头的焦距大小决定了图像采集的视野,相机的靶面越大,图像采集的视野范围越大,镜头的焦距越小,其视野范围越大。在进行图像采集的时候,相机上每个像元都会对光线进行接收,而像元接收光线的过程是一个积分的过程,像元接收光线的多少不仅与像元的大小有关系,而且与相机的曝光时间有关系,相机曝光时间越长每个像元接收光线的时间就会越长,感光效果也就越好,但曝光时间不能过长,因为曝光时间直接关联图像的采集频率,在实际工程应用中,桥梁挠度检测设备的工作效率与实际工况有直接关系。例如,桥梁静挠度检测,最佳图像处理速度为大于5 帧每秒,图像处理速度太低会影响用户使用质量,因此需要选取合适的曝光时间,来适配检测现场的应用需求。对于黑白相机来说每个像元感应的是光线的强弱,而光线强弱可以用8bit 长度的二进制数字来表示,体现为不同的灰度值,每个像素感应到不同的光线后都会输出不同的灰度值,这样就形成了一副图像,这样的数字图像被打包成数据流上传给图像处理板卡。
桥梁挠度检测装备的重点在于,可以远距离非接触式的完成桥梁挠度的检测,根据实际的检测需求,相机及镜头的参数配置如表1 所示。本系统检测精度需要控制在0.2 mm 以内,通过亚像素算法可以将精度提升十分之一至二十分之一个像素精度,因此在物距为20 m 的情况下可以采用50 mm 焦距的镜头,在物距为30 m 的条件下可以采用80 mm 焦距的镜头,在物距为10 m 的情况下可以采用25 mm 焦距的镜头,为了确保挠度检测的精度,我们需要采用定焦镜头,定焦镜头具有更加稳定的光学特性,在不同的物距条件下更换镜头,以满足检测精度要求。

表1 相机及镜头选型(25 mm、50 mm、80 mm 焦距)
4.2 主控板卡
桥梁挠度检测属于野外检测,要求检测设备具有体积小、重量轻、携带方便、便于操作等特点,另外结合卷积神经网络计算量大的特点,可以采用GPU 边缘计算模块完成此项功能,GPU 具有丰富的运算单元,可同时完成大量的并行运算,这对于图像处理中的矩阵运算具有非常大的优势,当进行图像矩阵运算的时候可以大幅度提升其运算速率,Jetson TX2 是一台7.5 瓦的单模组超级计算机,可为终端提供真正的AI 计算功能。此计算机基于NVIDIA PascalTMGPU 架构,搭载8 GB 内存,且内存带宽为59.7 GB/秒。Jetson TX2 配备多种标准硬件接口,可与不同种类和外形的产品实现集成。此GPU 配有256 个CUDA 核心,非常适用于常规卷积神经网络的边缘计算,具有低功耗、大算力的特点。
4.3 标识器
采用光电图像法检测桥梁挠度过程中,光线的变化会影响挠度检测精度,室外光线变化较大时会导致目标丢失,光线明暗变化很大的情况下,传统的匹配跟踪算法以及智能定位跟踪算法都会出现目标丢失的情况[5]。为解决此问题,可采用固定波长的光源作为背光板,以此制作标识器(如图3 所示)。此标识器的背光板的发光波长为500 nm,另外在镜头前端安装此波段的滤光片,在检测时干扰光线会被滤光片滤掉,只有靶标发出的光线才可以透过滤光片被相机接收,有效提高了桥梁挠度检测设备的抗干扰能力,其图像采集效果如图4 所示,从图中可以看出除标识器之外的图像相对较暗,此方法显著提升了标识器对比度,隔绝了外部光线的干扰,提升了目标识别的稳定性。

图3 背光标识器实物

图4 背光标识器图像效果
5 目标智能定位跟踪
本文采用深度学习方式实现靶标的智能定位跟踪,此方法具有稳定性高、环境适应能力强的特点,适用于桥梁挠度检测复杂多变的野外环境。基于深度学习的智能定位跟踪技术的关键在于神经网络模型的选择以及网络模型的训练。
5.1 深度学习网络模型
由于边缘计算的GPU 板卡依托于NVIDIA 产品为核心,并考虑到操作及理解的难易程度,本文选择以NVIDIA 官方的DetectNet 网络作为目标检测的核心算法。DetectNet 被集成在DIGITS 4(NVIDIA 官方提供的模型训练平台)内,作为一种标准的神经网络模型提供给开发者,使用时底层采用Caffe 深度学习框架进行模型的训练。DetectNet 与其他常规的目标检测网络的区别在于更擅长于多目标的检测。DetectNet通过引入固定的三维标签格式实现了这一优势,该格式使DetectNet 能够捕获存在可变数量对象的任何大小的图像。
DetectNet 的FCN 子网具有与GoogLeNet 相同的结构,但没有数据输入层,最终池化层和输出层。其优点是可以用预训练的GoogLeNet 模型初始化Detect-Net,从而减少训练时间并提高最终模型的准确性。FCN 是卷积神经网络(CNN)没有全连接层的图层。这意味着网络可以接受大小不同的输入图像,并以大步滑动窗口的方式有效地应用CNN。输出是可以覆盖在图像上的实值多维数组,非常类似于上述的DetectNet输入标签。
使用DetectNet 进行对象检测的主要好处是可以高效地检测大图像中的所有对象并生成精确的边界框。与使用CNN 分类器作为滑动窗口检测器相比,在DetectNet 中使用FCN 效率更高,因为它避免了由于窗口重叠而造成的多余计算。使用单个神经网络体系结构而不是多阶段算法过程来执行此任务,从而更简单。
这里使用307 个训练图像数据集和24 个验证图像测试集验证DetectNet 的性能,这些图像的大小均为1 536×1 024 像素,使用NVIDIA Caffe 0.15.7 和cuDNN RC 5.1 在DIGITS 4 中的单个Titan X 上花费63 分钟。在使用NVIDIA Caffe 0.15.7 和cuDNN RC 5.1 的Titan X GPU 上,DetectNet 设置网格像素大小16 可以对这些相同的1536×1024 像素图像进行推理,仅需41 ms(约24 FPS)。此网络模型具有高效、快速、准确性高等特点,通过少量训练即可达到理想的目标定位跟踪效果,与其它网络模型相比,更加适用于桥梁挠度检测系统的应用。
5.2 模型训练
由于桥梁挠度检测现场的环境复杂多变,因此需要充分的样本训练来提升目标定位跟踪的效果,在检测过程中由于物距的不同、光线的变化、检测角度的不同,会导致相机采集到的图像发生形状以及明暗的变化,此变化会影响对标识器的准确识别[6],因此在对模型进行训练时需要考虑上述因素,在模型训练数据中加入不同大小、不同观测角度以及不同明暗的图像,如图5、图6 所示。通过一定数量的训练数据进行训练后,深度学习模型可以准确稳定的识别被检测目标,有效提升桥梁挠度检测设备的稳定性。

图5 不同明暗的标识图片

图6 不同角度的标识图片
6 系统测试
为了验证本文所开发的桥梁挠度检测系统可以达到预期效果,进行了实桥测试,并与市面现有设备进行了对比。测试距离为24.901 m,仰角为13°。测试过程中天气转为多云,由于云彩遮挡,导致光线变化较大,因此对比设备无法持续定位目标,没有得到准确的挠度检测数据,但本文开发的挠度检测系统依然可以正常工作。现场环境见图7,检测图片见图8,图9、图10 是1 号标识器(左侧)以及2 号标识器(右侧)输出的挠度检测曲线,从图中可以看出左侧靶标由于阳光照射,导致亮度较强,右侧靶标相对较暗,但在此条件下系统仍然可以正常输出准确的挠度曲线,本文所开发的桥梁挠度检测设备适用于复杂的野外工作环境。

图7 现场环境

图8 检测图片

图9 自研光电挠度仪1 号靶标测试结果

图10 自研光电挠度仪2 号靶标测试结果
7 结论
本文根据现有桥梁挠度检测方法存在的实际问题,提出一种智能桥梁挠度检测设备,此设备采用基于深度学习的目标定位跟踪方法,并在神经网络模型训练样本中加入不同大小、不同角度以及不同明暗的训练样本,通过训练可以使设备在工作过程中稳定识别被检测目标,另外为了解决由于检测现场环境光线变化较大,导致的识别目标丢失的问题,本文提出了采用固定波段标识器作为被识别目标,并在镜头安装对应波段的滤光片,此方法有效抑制了环境光的干扰,使设备适用于桥梁挠度检测环境。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
World Journal of Clinical Cases(2020年16期)2020-09-16 13:35:08
世界农药(2019年3期)2019-09-10 07:04:10
中外文摘(2019年8期)2019-04-30 06:47:36
光学精密工程(2016年4期)2016-11-07 09:04:48
创新作文(小学版)(2016年28期)2016-02-28 18:24:50
肿瘤影像学(2015年3期)2015-12-09 02:38:45
故事作文·高年级(2015年5期)2015-09-08 08:27:33
吉林地质(2014年4期)2014-03-11 16:47:56