滑模控制在磁悬浮隔振器中的隔振特性研究
2023-07-27 07:05王瀚轩宋世哲
机械设计与制造 2023年7期
王瀚轩,闫 兵,宋世哲,黄 燕
(西南交通大学机械工程学院,四川 成都 610031)
1 引言
目前动力机组双层隔振系统多采用参数不可变化的被动隔振的方式,系统隔振特能主要受到机组质量、隔振元件刚度、阻尼参数的影响,同时安装位置不善也会恶化系统的隔振性能。在稳定性和有效性的双重标准下,仅靠被动隔振元件优化,隔振系统性能很难进一步提高[1]。
采用准零刚度隔振器和相关控制策略,由被动隔振器提供静态承载力,主动隔振元件提供动态的调整力,这种主被动隔振器并联的方式为系统稳定性和隔振性能的同步提升提供了可能[2]。
在柴油发电机组中,机械振动主要是由柴油机做功产生的往复惯性力、离心惯性力以及电机转动平衡精度等所导致的。在转速一定时,动力机组的振动信号以周期信号为主其中包含与转速相关的基频及倍频成分[3]。而在实际工况中,动力机组由于各缸做功不均匀,其工作转速会在5%以内的范围波动,使动力机组转速导致的振动信号频率不确定的特点。此外动力机组还具有结构参数的不确定性,磁悬浮隔振器的刚度非线性等,这些特性要求抑制此类振动的控制方法具有很好的鲁棒性。文献[4]通过浮筏主动隔振系统建模以抑制低频外部扰动为目标,设计了滑模变结构控制器控制前后,误差信号的值下降了50%以上。文献[5]等以磁流变阻尼器为执行器,设计了抗冲击模糊滑模控制器,仿真证明了,基于模糊滑模控制可以有效减小冲击加速度和系统位移,具备较好的可控性和鲁棒性。因此可以利用滑模控制方法对磁悬浮隔振器的刚度进行精确控制。
这里首先以简化的二自由度动力包模型作为研究对象,采用MATLAB/Simulink构建了含有的磁悬浮隔振器的二自由度系统模型,然后通过S函数设计出滑模控制器,最后在扫频工况下将滑模控制算法同传统橡胶隔振器进行对比,验证控制算法的有效性。该研究可为进一步提高系统隔振特性,对动力机组全工况整机振动控制具有参考价值。
2 动力机组动力学模型及简化
以某型号的出口阿根廷米轨车动力包为例,其主要激励为柴油机的倾倒力矩以及电机的离心惯性力,该型号动力机组在扫频激励下力传递率曲线,如图1所示。在倾倒力矩方向以及离心惯性力方向主要是,第5阶以机组横摇为主的模态,此阶模态引起系统最大的共振峰。第17阶模态以构架横摇为主,此阶模态频率与机组怠速工况激振频率较接近。因此将十八自由度隔振系统在倾倒力矩以及离心惯性力方向进行化简成二自由度隔振系统进行研究[6]。系统简化模型,如图2所示。
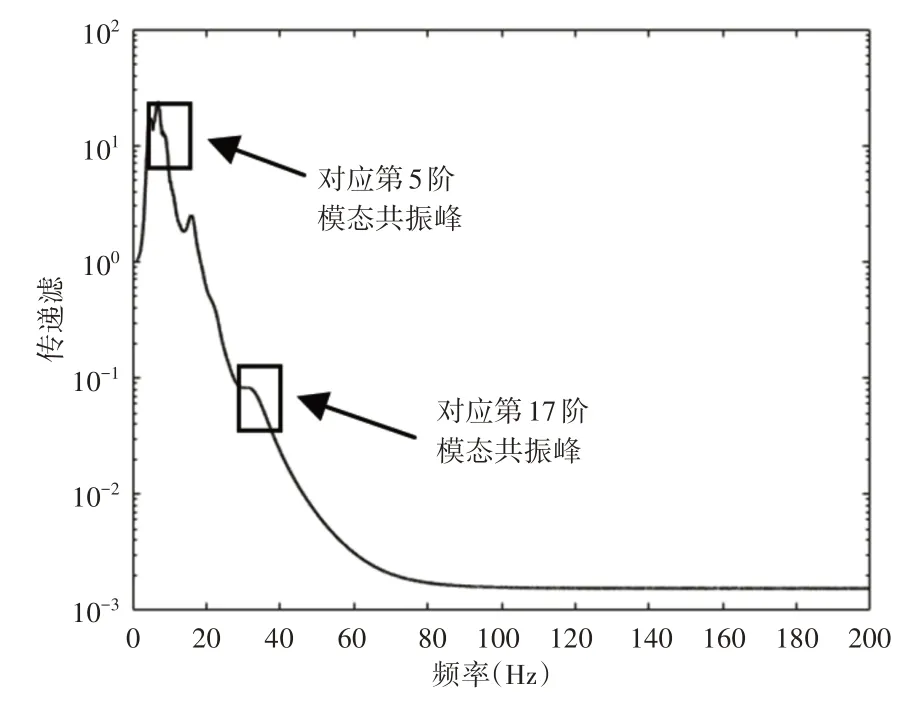
图1 弹簧隔振器系统力传递率曲线Fig.1 Force Transmission Curve of the Spring Isolator System
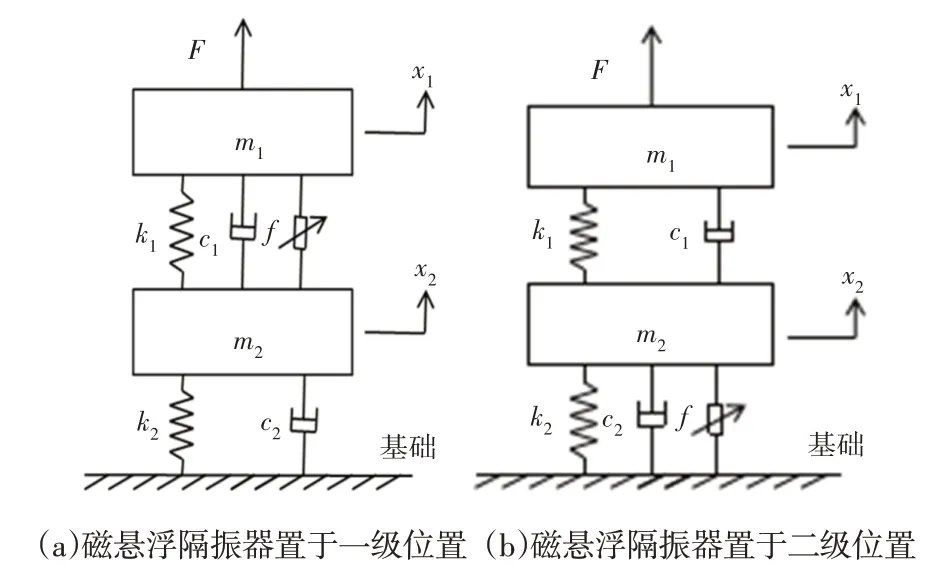
图2 系统简化模型Fig.2 Simplified Model of the System
图中:m1、m2—动力机组和构架倾倒力矩方向的等效质量;k1、k2—一级、二级隔振器总垂向刚度;c1、c2—一级、二级隔振器的等效阻尼;x1、x2—机组和构架的垂向位移;F—柴油机做功产生的倾倒力矩;f—磁悬浮隔振器产生的控制力。系统动力学方程可表示为:
取状态变量为:
则系统状态方程为:
式中:
根据上述方程,可在Simulink 软件中建立该系统的仿真模型,验证滑模控制算法对动力包振动系统的有效性。仿真模型的输入变量分别为激振力F和控制力f,输出变量分别为上层机组的振动速度、中间构架的振动速度及位移以及磁悬浮隔振器控制电流值。
3 滑模控制器的设计
滑模控制器的设计包括两大部分[7-8]:
(1)滑模切换面函数S(x);
(2)合理的滑模控制率。
3.1 求取滑模切换面函数
设参考模型的状态变量为:
设计的滑模控制器实质上是让被控双层隔振系统与理想的运动轨迹相比较,使滑动模态产生在两者的动力学系统中,则我们控制的最优目标为中间构架的速度和位移都为0,此时传向基础的力为0。于是可定义误差矢量e分别为构架实际速度、位移和位移的积分与构架理想的速度、位移和位移积分的差值,其矩阵形式可表示为:
则:控制系统的误差动力学方程为:
其中,
3.2 切换面的设计
系统想要迅速衰减至稳定状态时应处于欠阻尼(0 <ζ<1)状态,此时闭环系统的根应该全部位于左部相平面,才能保证系统稳定。
从而确定c1、c2、c3的取值,滑模切换函数也就可以确定:
3.3 设计滑模控制率
由式(6)、式(7)可得[9]:因为矩阵CAe、CBe、CGe均可逆,于是:
采用等速趋近律,同时用sat函数代替sign函数来消除抖振现象[10-11]。
令:
式中:ε—滑模趋近律,其影响运动点趋向滑模面的速率,同时影响系统波动性,ε越小,稳定速度越慢,系统抖动小,反之,当ε越大时,稳定速度越快,系统的抖动越剧烈;φ—边界层厚度。根据Lyapunov稳定性判据:V(x)正定,V̇(x)负定,则系统渐进稳定。设滑模控制系统的Lyapunov函数为:
当且仅当s=0时V̇(x) = 0。由此判定系统渐进稳定。
由式(9)、式(10)、式(12)得到磁悬浮隔振器的控制力为:
4 仿真分析
为了验证滑模控制器的效果,基于简化的动力学模型,在Simulink对系统模型进行了仿真[12],模型具体参数,如表1所示。
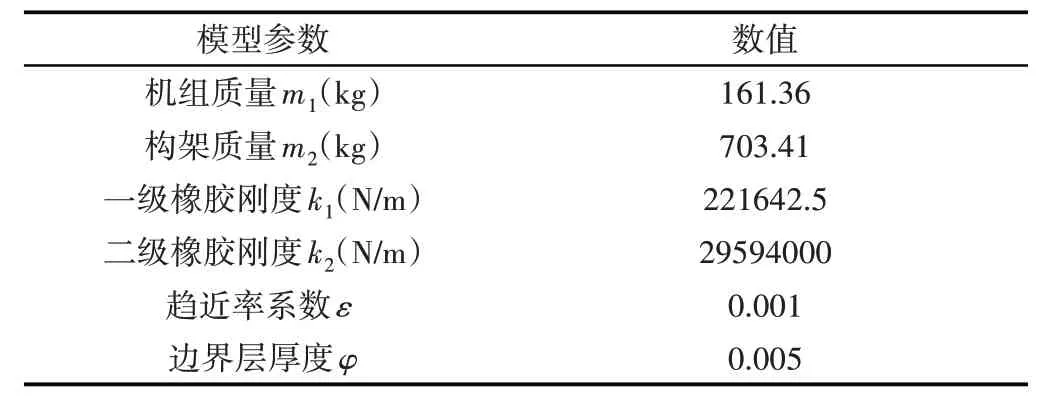
表1 仿真模型参数表Tab.1 Simulation Model Parameters Table
根据橡胶隔振器的阻尼特性,其阻尼系数与刚度和振动频率有关,可用下式描述:
式中:η—橡胶隔振器的损耗因子,对于该动力机组其值可取η=0.1;[C]—系统的阻尼矩阵;[K]—系统的刚度矩阵;ω—振动频率;使磁悬浮隔振器分别处于一级和二级隔振位置和橡胶隔振器并联,如上文,如图2所示。对比悬架和机组的振动烈度,系统的力传递率,控制力以及控制电流大小。
仿真结果,如图3所示。
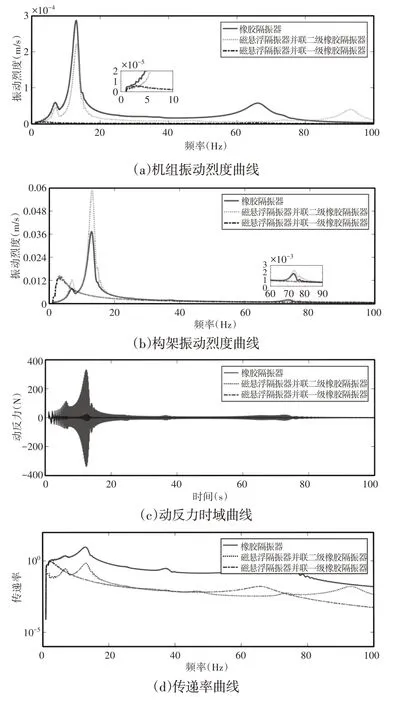
图3 滑模控制器实际控制效果验证Fig.3 Verification of Actual Control Effect of Sliding Mode Controller
在一级橡胶隔振器位置并联磁悬浮隔振器相当于理论上将一级隔振器动刚度减小至0[13],对系统固有频率会有显著影响。根据图3(a)可以看出,第一阶固有频率从7Hz降低至0.93Hz,约为原来的13.3%,第二阶固有频率从13.5Hz降低至3.3Hz,约为原来的24.4%;同时增加了上层机组在7.5Hz之前的低频振动烈度,降低了系统的稳定性;而在高频段时可以降低在共振时机组的振动烈度,非共振时影响不大。根据图3(b)、图3(c)、图3(d)可以看出,并联磁悬浮隔振器会在全频率范围内显著减小中间构架振动烈度,降低动反力和力传递率。根据图3(e)、图3(f)可以看出,控制力在机组刚开始启动经过固有频率时处于较大值,当趋于滑模面时磁悬浮隔振器的控制力也随之减小,并趋于稳定,控制电流也由开始的波动状况逐渐趋于稳定。
在二级橡胶隔振器位置并联磁悬浮隔振器相当于减小二级隔振器动刚度,但系统固有频率变化不明显,根据图3(a)可以看出,并联磁悬浮隔振器时,机组振动烈度在经过第一、二次共振时分别增加了50%和66%,引起机组的剧烈振动,降低了系统的稳定性。根据图3(b)可以看出,并联磁悬浮隔振器时,构架振动烈度略微降低,在经过第一、二次共振时均降低了28.6%。根据图3(b)、图3(c)、图3(d)可以看出,在二级隔振位置并联磁悬浮隔振器可以明显降低动反力和力传递率。并且在7.5Hz之前的低频范围相比于在一级隔振位置并联磁悬浮隔振器采用二级隔振位置并联磁悬浮隔振器可以获得更好的隔振效果。根据图3(g)可以看出,控制力在机组共振时产生较大的值,其他时较小,但是由于二级机组的振动位移较小,在相同控制力的情况下,导致计算出来的控制电流过大无法应用于工程实际中。
综上所述,采用磁悬浮准零刚度隔振器的滑模控制无论是同一级隔振器并联还是同二级隔振器并联相比于传统被动隔振都可以有效的降低力传递率和动反力,但是无论是系统稳定性角度还是从节能角度上来讲,磁悬浮隔振器同一级隔振器并联性能都优于磁悬浮隔振器同二级隔振器并联效果。
5 结论
建立2自由度的简化动力机组模型,并设计滑模控制器,扫频激励条件下在Simulink中进行仿真分析。
(1)将传统隔振系统同采用同一级橡胶隔振器位置并联的磁悬浮隔振系统进行对比,仿真表明在滑模控制器控制下的磁悬浮隔振系统在时域显示出良好的控制效果,系统固有频率,基础动反力,传递效率,构架振动烈度均有明显下降,机组稳定性略微下降。
(2)对比了将磁悬浮隔振器放在一级隔振器以及二级隔振器两种位置的作用效果,仿真表明同二级隔振器并联有更好的控制效果,同时所需电流更小,电流波动更小,稳定速度更快,但输出力更大,有更好的工程实用前景。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
建材发展导向(2021年7期)2021-07-16
中华养生保健(2020年3期)2020-11-16
家庭影院技术(2020年6期)2020-07-27
电子制作(2018年17期)2018-09-28
中华诗词(2018年1期)2018-06-26
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09