一种基于慧鱼的智能化植树装置
2023-07-26 10:12孙艺文
装备制造技术 2023年5期
孙艺文
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
0 引言
中国防护林种植方式主要是以人工种植为主、机械作业为辅[1]。这种种植方式存在着效率低下、人工负荷大、树苗成活率低等问题。在沙漠化等地区以及极端恶劣的环境下,智能化植树装置很好地解决以上不足。它在解决人工成本问题的同时,又能使植被存活,达到植被修复及防风护林的目的。智能化植树装置在降低操作难度、提高工作效率、环境保护等方面具有重要作用。但是,在很多植被修复、防风固沙的地区,原有的自动化植树装置加上半人工辅助操作已无法更加智能化地实现要求。本文针对此问题设计了一种基于慧鱼的智能化植树装置,以解决普通植树装置因无损伤钻坑、检测土壤质量、填土而存在操作难度大、工作效率低的问题,从而实现智能化操作。
1 装置的功能设计分析
1.1 适用对象
本装置适用于种植树苗等植树造林的地区,大到生态环境遭到严重破坏的沙漠化地区,小到日常种植树苗等地方。在种植树木的过程中可以对其进行智能化位置识别、检测土壤质量、自动夹取树苗以及植后养护。
1.2 功能分解
本装置主要包含三大功能:智能化识别种植位置后,通过检测土壤质量,用机械手夹取相应合适的树苗种类进行栽植以及植后的修复及营养液的灌溉。在整个工作流程中经过智能化识别定位后,进行钻坑。从运载车中,通过机械手来抓取树苗,将树苗种植到相应的坑位,最后完成填土的步骤以及营养液的灌溉。整体种植一棵树的时间节拍在5 min 之内。装置的总流程如图1 所示。

图1 装置的流程图
1.3 总体方案说明
根据装置的种植流程安排,可以将总体方案分解为定位识别后的钻坑、机械手夹取树苗及种植和植后的修复及灌溉三部分。
1.3.1 智能化识别钻坑过程
当需要种植树苗时,将车本体开至合适的土壤旁,通过智能化识别到合适位置时,用其右侧安装的传感器探测土壤湿度、水分、PH 值等一系列影响树苗生长相关因素。在得到相应的数据参数后选取适合该土壤种植的树苗。采用特制的钻头进行钻坑(可根据不同直径的树苗来更换不同尺寸的钻头)。电机与丝杠相固定,电机启动,驱动着丝杠进行转动,利用电机正反转来带动丝杠进行上下往复运动,安装在丝杠下端的钻头完成相应的钻坑动作[2]。
1.3.2 机械手夹取及种植过程
此时,转动旋转座,从而带动机械臂旋转方向[3],机械手端部的工业相机对钻坑位置进行识别后,从运载车后身抓取相应尺寸大小的树苗,机械手通过马达控制丝杠,并带动机械手往下运动,进而使得机械手爪部对准并接触到所钻坑的底部。此时,通过机械臂下端的垄土铲将大量的土覆盖到树苗的根部,后通过丝杠转动将机械臂收回到上方合适的位置,从而完成树苗的种植过程。
1.3.3 植后的修复及灌溉过程
在完成种植过程后,转动旋转座,带动机械臂旋转。通过控制丝杠转动,使机械臂手左侧的营养喷头喷射出所需要的营养液,以确保种植后的树苗能够正常生长。
2 装置的功能设计
2.1 装置的结构原理
智能化植树装置包括车体、传动电机、钻头、机械臂等装置。车体上方通过齿轮座装有转向齿轮,转向齿轮通过啮合进行传动,传动丝杠的一端连接传动电机的输出轴,而其另一端螺纹连接丝母。在转向齿轮的中间上方装有升降框架。传动丝杠的上端连接传动电机(图2 所示丝杠顶部右端的电机)下方的输出轴,在升降框架的外围套装机械爪升降传动架,在机械爪升降传动架的上方水平方向设有左端连接车架的传动丝杠,传动丝杠外围螺纹连接丝母。传动丝杠的右端连接传动电机的输出轴,在车架的左端连接转轴支架。转轴支架的后侧面上连接机械爪竖直转向传动杆的一端,机械爪竖直转向传动杆的另一端用螺钉固定在机械爪升降传动架的后侧面上。在转轴支架的左侧面上连接外转轴和内转轴,在两机械爪之间设铰接支架。电机与丝杠相固定,电机启动,驱动着丝杠进行转动,利用电机正反转来带动丝杠进行上下往复运动,安装在丝杠下端的钻头完成相应的钻坑动作[4]。
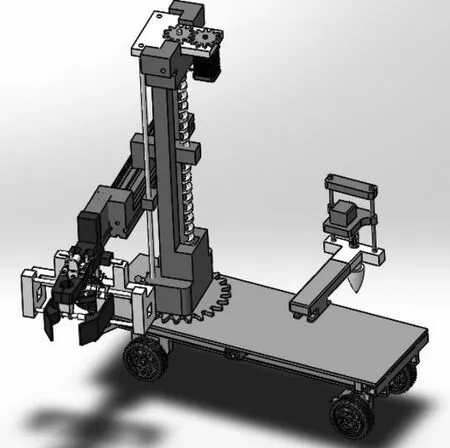
图2 装置的总示意图
2.2 装置的实际操作过程
当装置通电后,车本体行驶到合适的位置,通过机械臂右端的全通滤波网络式传感器[5],实时检测土壤情况。将传感器的探针深入土壤层来探测土壤的湿度、水分、PH 值等一系列影响树苗生长相关因素,通过互联网技术将所探测到的相关数据实时传输反馈给使用者,让使用者对该地的不同区域段的土壤情况有所了解,并及时对所栽种树苗种类做出调整。启动液压控制的钻坑机构在相应位置进行钻坑后,机械臂手上的工业摄像机通过识别坑体的大小来从运载车中选取相应尺寸的树苗,机械臂将合适大小的树苗夹取到坑内后,启动垄土铲将其两边的土壤覆盖在树苗上,后进行镇土、压平。最后,左端的营养液喷头喷射出相应的营养液,以确保树苗能够正常生长。
3 装置关键件的有限元分析
3.1 垄土铲的有限元分析
智能植树车的垄土铲采用的材料为Q235-B,其屈服强度235 MPa、张力强度390 MPa、泊松比0.274、弹性模量210 GPa。网格化的模型经过运算分析,在约束和载荷的作用下,可以得到相应的静态应力分布图和位移分布图,如图3、图4 所示。通过分析图3 可知,最大应力值位于安装板的中部,逐渐向垄土铲末端分散。最大应力值为1.06 × 107N/m2,小于屈服强度2.35 × 108N/m2,因此满足强度条件。分析图4 可知,垄土铲的前端部有明显的位移,且小于最大变形量,同样满足刚度的设计要求[6]。

图3 垄土铲的应力分析
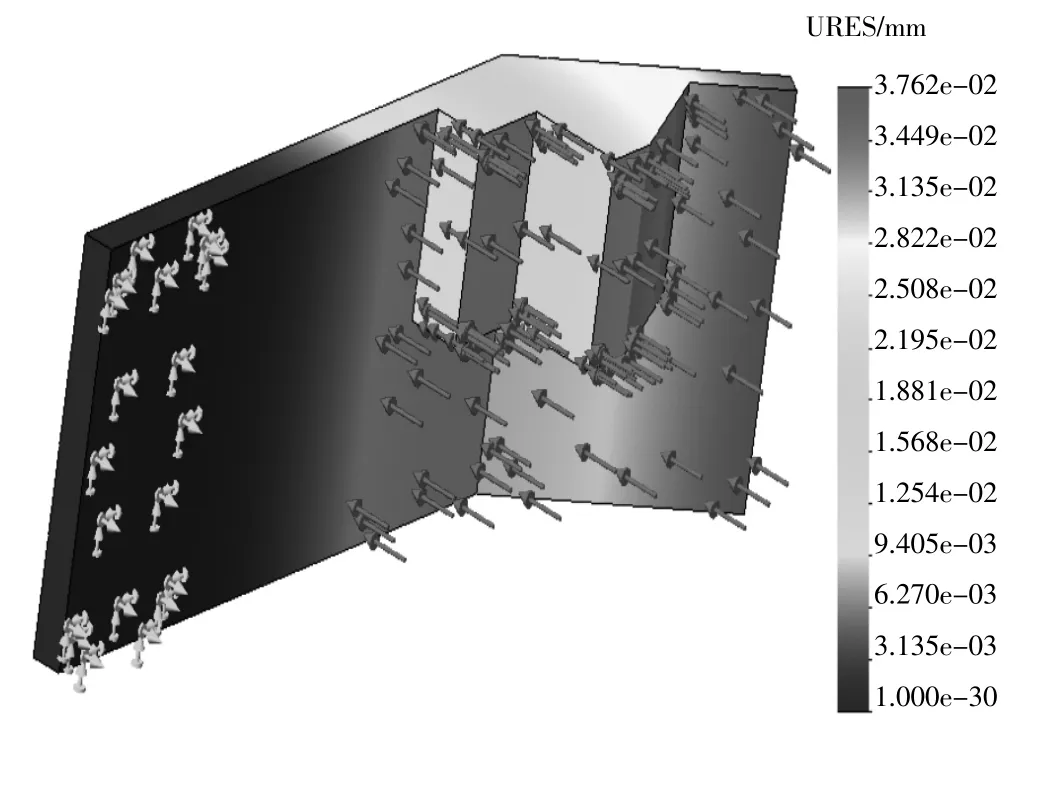
图4 垄土铲的位移分析
3.2 机械臂手的有限元分析
通过分析图5 可知,最大应力值位于前端定位销处。最大应力值为1.577 × 107N/m2,小于屈服强度2.35 × 108N/m2,因此满足强度条件。分析图6 可知,夹手的前端部有明显的位移,且小于最大变形量,同样满足刚度的设计要求。

图5 机械臂手的应力分析

图6 机械臂手的位移分析
4 结语
针对土地沙漠化严重,生态环境恶化,设计了一款基于慧鱼的智能化植树装置。装置主要包括装置本体、钻坑机构和种植系统,所述装置本体具有车身。种植树苗系统包括旋转座、机械臂,旋转座设置于装置身上,从而达到将钻坑与种植相结合、检测土壤质量以及无死角填土的功能。此装置有效地解决了沙漠地区因干旱而导致的土地沙漠化及水土流失等问题。种植树苗一体化,达到植被修复及防风护沙的目的。
猜你喜欢
小学生学习指导(高年级)(2022年4期)2022-04-26
数学小灵通(1-2年级)(2021年11期)2021-12-02
数学小灵通(1-2年级)(2021年5期)2021-07-21
小学生学习指导(低年级)(2021年3期)2021-07-21
小天使·一年级语数英综合(2021年3期)2021-05-08
制造技术与机床(2019年11期)2019-12-04
小学生学习指导(低年级)(2019年3期)2019-04-22
作文周刊·小学一年级版(2019年48期)2019-01-08
深圳职业技术学院学报(2015年5期)2015-11-30
小说月刊(2014年4期)2014-11-18