第二代星基增强系统GATBP的PPP服务模糊度固定效果
2023-07-26 04:41吴继忠
大地测量与地球动力学 2023年8期
吴继忠 陈 杰
1 南京工业大学测绘科学与技术学院,南京市浦珠南路30号,211816
星基增强系统SBAS利用一定范围内的地面监测站对导航卫星进行监测,通过地球同步轨道GEO卫星播发距离、轨道、时钟和电离层改正数以及完好性信息,以提高定位精度、服务可用性和完好性,是GNSS的重要组成部分。第一代SBAS包括美国的广域增强系统(WAAS)、欧洲的静地卫星导航重叠服务(EGNOS)、日本的多功能卫星增强系统(MSAS)、俄罗斯的差分校正和监测系统(SDCM)、印度的GPS辅助静地轨道增强系统(GAGAN)等。随着各导航卫星系统逐步播发第2个航空无线电导航服务(ARNS)信号(如GPS L5信号、Galileo E5信号和BDS B2信号),直接利用双频无电离层组合模型消除大部分电离层延迟成为可能。2017年澳大利亚和新西兰启动第二代双频多星座SBAS实验平台GATBP[1],以评估SBAS在不同行业的应用性能。GATBP通过L1和L5广播卫星轨道和时钟信息来支持PPP服务[2],其中,通过L1发送的改正数支持GPS双频用户,通过L5发送的改正数支持GPS/Galileo双频用户[3]。
针对GATBP各类服务在不同环境下的精度、可用性、保护性水平等的研究较多[2-4],但目前尚未有关于GATBP PPP服务模糊度固定率的研究成果。本文使用GATBP精密轨道和钟差数据对10个MGEX测站进行PPP解算,计算得到观测值残差、模糊度固定率、定位精度和对流层延迟估计误差,全面验证GATBP的PPP服务性能。本研究对我国北斗SBAS PPP服务性能的提升具有一定的参考意义。
1 PPP及其模糊度固定
1.1 PPP函数模型
PPP的函数模型广泛采用双频GNSS伪距和相位观测值的无电离层组合[5],观测方程如下:
(1)

1.2 星间单差模糊度固定法
(2)
(3)
(4)
无电离层组合包含接收机端和卫星端的硬件延迟偏差,一般通过星间单差来消除接收机端的硬件延迟偏差[6],因此进行PPP模糊度固定时只需考虑卫星端的硬件延迟偏差。由于模糊度和硬件延迟之间存在相关性,直接分离整周模糊度和硬件延迟较为困难,而硬件延迟具有短时间内的稳定性,因此可将其分解为常整周部分和随时间变化的小数部分。整周部分不会破坏模糊度的整数特性,因此会被模糊度吸收,剩余的硬件延迟小数部分则由小数周偏差(fractional cycle bias,FCB)进行改正。另一种改正方法是与观测值相关的信号偏差(observable-specific signal bias,OSB)改正[7]。不同于传统的FCB产品直接提供宽/窄巷FCB,OSB改正方法直接提供卫星端伪距和相位的偏差值,能够支持多个GNSS系统并进行标准化处理。宽/窄巷FCB与OSB的转换可以表示为[8]:
(5)

(6)
(7)

(8)

2 实验结果分析
2.1 数据处理策略
选取10个位于GATBP服务区域内的MGEX测站,如图1所示,其中正方形所在位置为GEO卫星Inmarsat-4F1的星下点,圆圈为卫星截止高度角设置为10°时GATBP的服务区域。
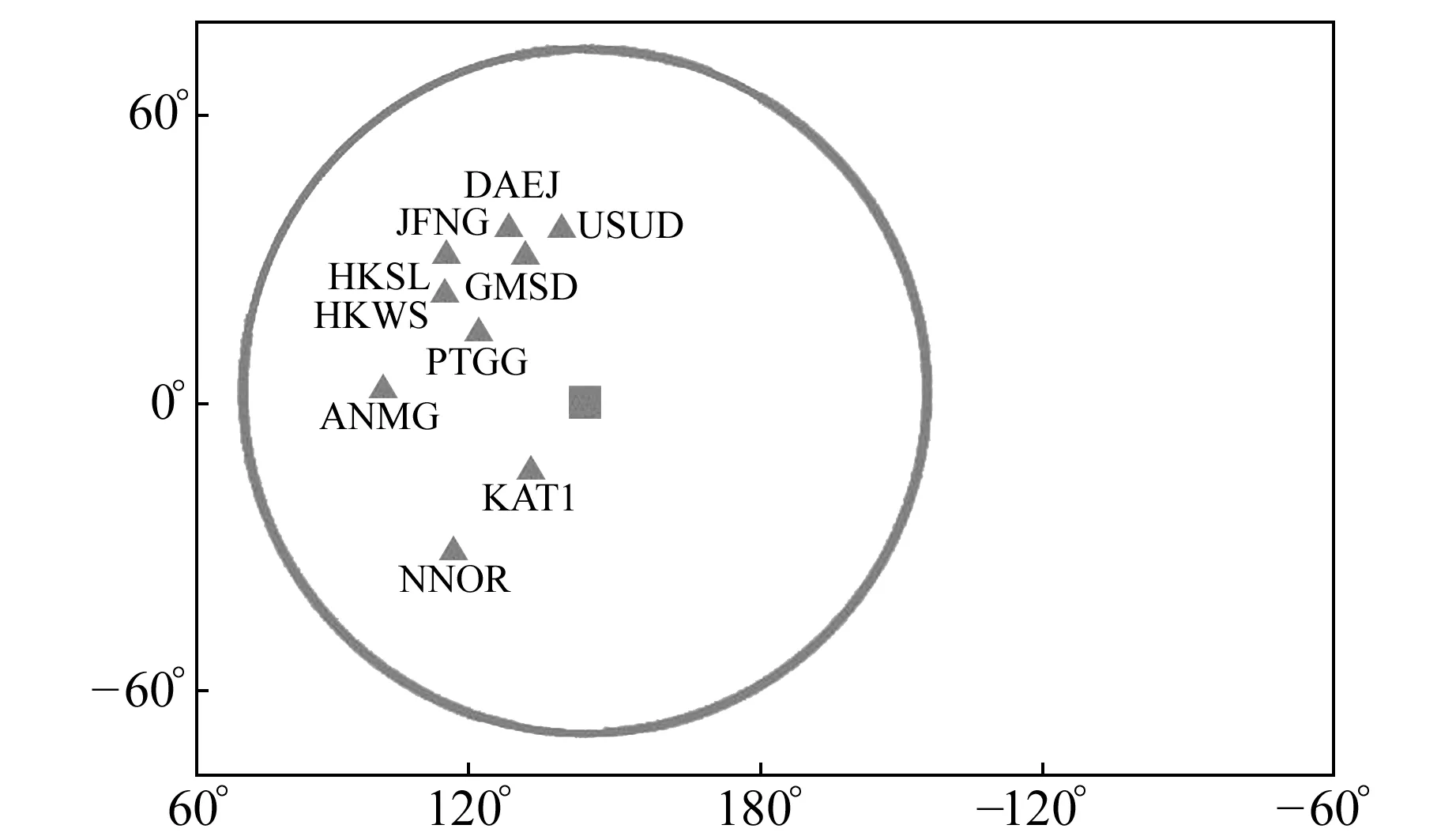
图1 MGEX测站分布Fig.1 Distribution of MGEX stations
从图1可以看出,卫星截止高度角为10°时,GATBP服务可覆盖72°~215°E、-74°~74°N之间的区域。需要说明的是,第二代SBAS PPP服务范围取决于GEO卫星的位置和轨道高度,而第一代SBAS的服务范围既与GEO卫星的位置和轨道高度有关,又与其地面监测站生成的电离层格网改正数实际覆盖范围有关。
基于上述MGEX测站2019年doy51~57的观测数据,使用动态模式进行处理和分析,数据采样间隔均为30 s。由于GATBP PPP服务仅支持GPS和Galileo,因此在PPP解算时仅选择GPS和Galileo卫星的观测数据。观测值使用无电离层组合,待估参数包括测站坐标、接收机钟差、对流层延迟以及模糊度参数。对流层延迟通常以干延迟、湿延迟及相应的映射函数表示,利用Saastamoinen模型改正其干延迟,采用随机游走过程估计其湿延迟,使用全球投影函数GMF将天顶对流层延迟投影到传播路径上。模糊度解算显著性检验ratio值的阈值设置为3。数据处理策略如表1所示。
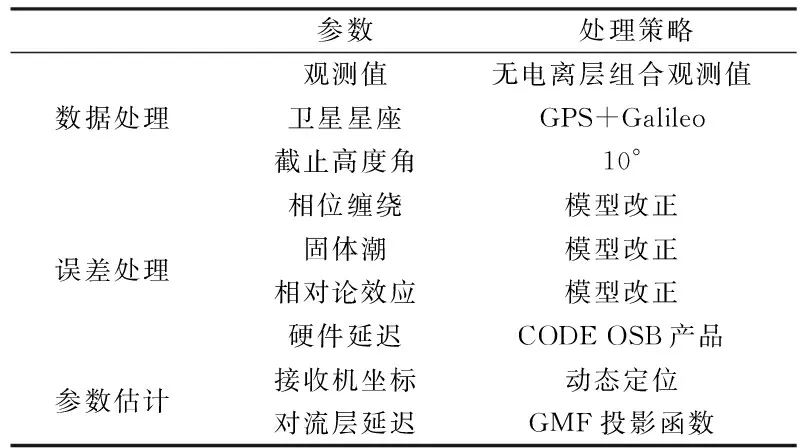
表1 数据处理策略Tab.1 Data processing strategy
设计2种不同的方案进行PPP固定解解算:方案A使用GATBP精密轨道和钟差产品;方案B使用CODE的事后精密轨道和钟差产品。2种方案除了精密轨道与钟差产品的来源不同外,其余数据处理策略均一致。解算完成后,对模糊度固定率等结果进行分析。
2.2 模糊度固定率比较
由于宽巷和窄巷模糊度固定率变化较为平稳,故统计各站2种方案7 d的模糊度固定率平均值(图2、3)。可以看出,方案A中GPS和Galileo宽巷模糊度固定率较接近,变化范围为83.7%~99.6%,平均为95.0%;窄巷模糊度固定率也较接近,变化范围为27.7%~32.8%,平均为30.2%。方案B中GPS和Galileo宽巷、窄巷平均模糊度固定率均维持在95%以上。由此可知,使用GATBP产品时,GPS和Galileo宽巷模糊度固定率与CODE产品持平,但窄巷模糊度固定率低于CODE产品。这可能是因为GATBP所用的地面跟踪站数量仅为CODE的1/4左右[3],导致GATBP的卫星轨道和钟差精度相对较低。窄巷和宽巷组合的波长分别为10.7 cm和86 cm,GATBP的卫星轨道和钟差的误差水平普遍超过窄巷组合的波长,但远低于宽巷组合的波长,因此其误差对窄巷模糊度固定率的影响较为显著,对宽巷模糊度固定率的影响可忽略不计。
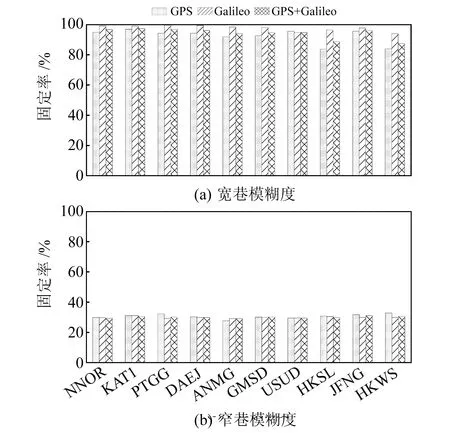
图2 方案A的平均模糊度固定率Fig.2 Average PPP ambiguity fixed rate of scheme A

图3 方案B的平均模糊度固定率Fig.3 Average PPP ambiguity fixed rate of scheme B
2.3 观测值残差比较
为进一步分析模糊度固定率的差异,图4给出不同方案所得各测站上GPS和Galileo无电离层组合相位观测值残差的单日RMS序列。
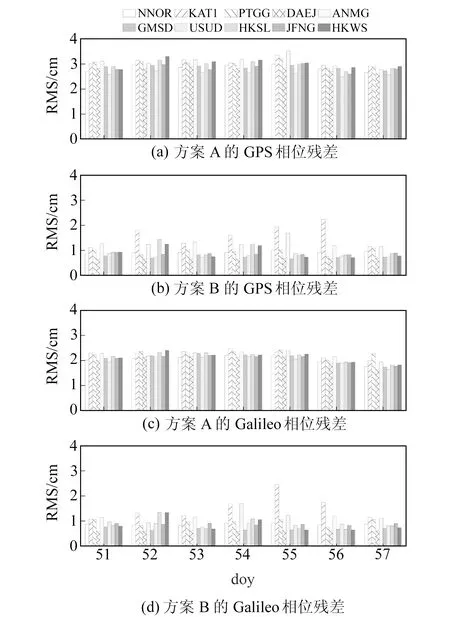
图4 相位残差RMSFig.4 RMS of phase residuals
由图4可见,方案A中GPS相位观测值残差RMS变化范围为2.5~3.5 cm,平均为2.9 cm;Galileo相位观测值残差RMS变化范围为1.6~2.5 cm,平均为2.1 cm。方案B中GPS相位观测值残差RMS变化范围为0.6~2.2 cm,平均为0.9 cm;Galileo相位观测值残差RMS变化范围为0.6~2.5 cm,平均为0.9 cm。整体上看,方案A的相位观测值残差RMS明显大于方案B。结合2种方案的窄巷模糊度固定率可以看出,窄巷模糊度固定率越高,相位观测值残差的RMS越小。通过相关性分析可知,在95%的置信水平下,GPS和Galileo窄巷模糊度固定率与相位观测值残差RMS的Pearson相关系数分别为-0.980、-0.954,表明窄巷模糊度固定率与相位观测值残差RMS之间存在很强的负相关性。
2.4 定位精度比较
比较各测站单个历元估计的坐标与IGS周解的坐标值,并转换至站心坐标系下,图5为2种方案所得N、E、U方向上定位误差的单日RMS。
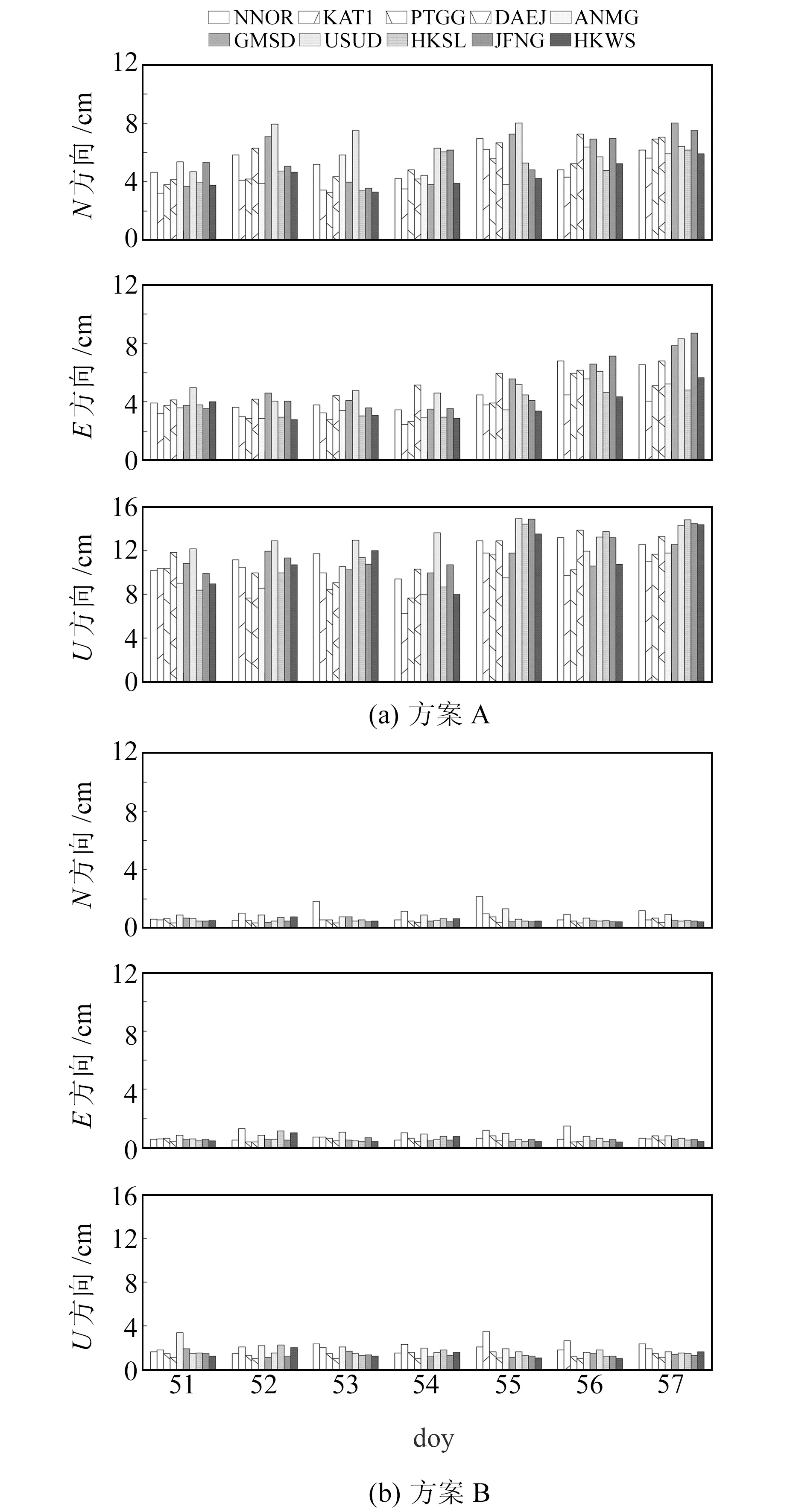
图5 不同方案定位误差的RMSFig.5 RMS of positioning errors of different schemes
从图5(a)可以看出,N、E、U方向上的定位误差RMS分别为3~8 cm、2~6 cm和8~15 cm,水平方向定位误差RMS的均值为5.6~8.7 cm,三维定位误差RMS的均值为10.8~15.0 cm,这一结果与文献[4]的结论基本一致。从图5(b)可以看出,N、E、U方向上的定位误差RMS分别为0.5~1 cm、0.5~1 cm和1~2 cm,整体精度明显高于方案A。与方案A相比,方案B的定位精度在N、E、U方向上分别平均改善86%、81%和87%,这同样得益于方案B使用了更高精度的卫星轨道和钟差。
2.5 对流层延迟估计比较
分别提取2种方案估计的天顶对流层延迟值,以IGS发布的天顶对流层延迟值为参考,计算各测站上对流层延迟估计值的绝对误差,并统计该绝对误差的单日RMS,结果如图6所示。
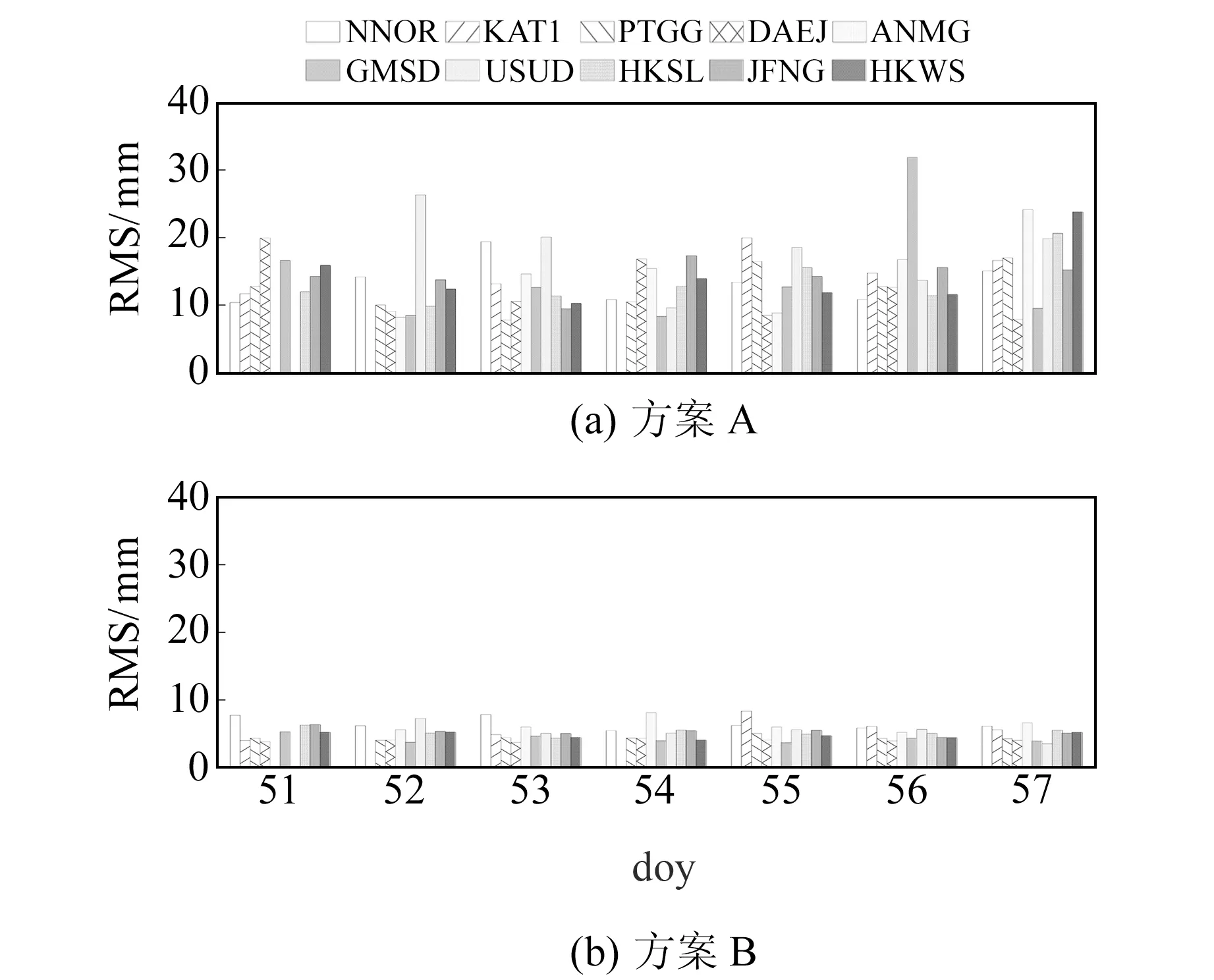
图6 对流层延迟估计误差的RMSFig.6 RMS of ZTD estimation errors
由图6可以看出,方案A的对流层估计误差的RMS为7.8~31.8 mm,平均为14.1 mm;方案B的对流层估计误差的RMS为3.5~8.3 mm,平均为5.2 mm。相比于方案A,方案B的对流层延迟精度平均提高63.4%。综上可知,窄巷模糊度固定率、相位观测值残差、定位精度和ZTD估计误差之间存在很强的关联性。
3 结 语
本文对第二代SBAS实验平台GATBP的PPP服务模糊度固定效果进行分析。结果表明,使用GATBP产品的宽巷模糊度固定率平均值在95%以上,但窄巷模糊度固定率平均值仅为30.2%,远低于使用CODE产品的窄巷模糊度固定率95%。与此同时,使用GATBP产品的相位观测值残差是使用CODE产品的2~3倍,其N、E、U方向上的定位误差及对流层延迟估计误差的RMS也远大于使用CODE产品的估计结果。造成这一结果的原因是GATBP地面跟踪站数量偏少,导致精密轨道和钟差产品的精度较低。
猜你喜欢
大地测量与地球动力学(2022年7期)2022-07-06
房地产导刊(2021年12期)2021-12-31
区域治理(2021年14期)2021-08-11
导航定位学报(2018年3期)2018-09-03
测绘学报(2017年1期)2017-02-16
载人航天(2016年4期)2016-12-01
成都信息工程大学学报(2016年6期)2016-06-01
水利科技与经济(2016年9期)2016-04-22
芳草·文学杂志(2015年3期)2015-05-28
沙漠与绿洲气象(2014年1期)2014-03-20