
基于迎角和法向过载反馈的纵向控制律设计
2023-07-25 11:22:24冷国旗裴登洪邹俊俊
教练机 2023年2期
冷国旗,裴登洪,相 梅,邹俊俊
(航空工业洪都,江西 南昌,330024)
0 引言
现代高敏捷性的战斗机不但具有边界限制功能,还具有响应快速且操纵精准的操纵特性,之所以具有如此优秀的飞行品质是因为采用自动控制技术设计了控制增稳控制律。控制增稳纵向控制律一般以俯仰角速率、迎角和法向过载等信号作为反馈信号并结合自动控制技术实现的。如果控制增稳控制律的某个反馈信号失效,就可能造成边界限制失效或者飞行品质降级,影响飞行安全。
本文对俯仰角速率信号的作用进行分析,并基于某飞机针对俯仰角速率信号失效,只采用迎角和法向过载反馈的情况研究设计了纵向控制律。为验证设计控制律的有效性,进行了飞行品质计算分析。
1 俯仰角速率信号的作用分析
俯仰角速率信号是电传飞行控制系统的主要反馈信号之一,主要用于增加飞机纵向阻尼导数,改善飞机的纵向短周期模态阻尼特性。如果俯仰角速率反馈信号失效且飞机本体的纵向阻尼偏低,操纵飞机时飞机就会出现超调或俯仰振荡等现象,很难控制飞机,给飞行员带来很大的操纵负担,严重影响飞行安全。
为分析俯仰角速率信号的作用,分别在有俯仰角速率反馈和无俯仰角速率反馈的情况下,对飞机施加纵向阶跃操纵,响应对比曲线见图1,从中可知,有俯仰角速率信号反馈时,飞机阶跃响应快速且精准,如图中蓝色实线所示;无俯仰角速率信号反馈时,飞机产生俯仰振荡,很难控制飞机,如图中红色虚线所示。
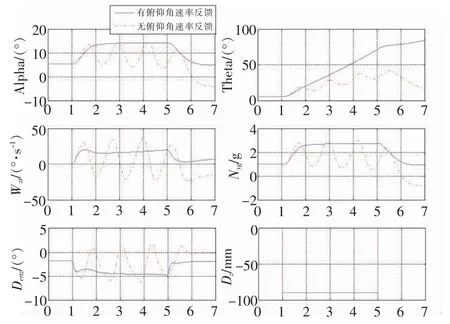
图1 纵向阶跃响应曲线
图1 中Alpha 表示迎角,单位为(°),Theta 表示俯仰角,单位为(°),Wzt表示俯仰角速率,单位为(°/s),Nyg表示法向过载,单位为(g),Dertz表示平尾,单位为(°),Dz表示纵向杆位移,单位为(mm)。
2 纵向控制律设计方案
2.1 控制律功能要求
纵向控制律应保证飞机在包线范围内具有稳定性和操纵性,保证在包线范围内具有迎角和法向过载等边界限制功能,具有中性速度稳定性等功能。
2.2 控制律反馈信号
根据控制律设计功能要求,如果想精确操纵飞机,必须具有足够的纵向阻尼导数和良好的纵向短周期模态阻尼特性。由俯仰角速率信号的作用分析可知,俯仰角速率反馈可实现该功能。
然而,若俯仰角速率信号失效,则必须采取措施代替俯仰角速率信号,为飞机提供阻尼。飞机上的俯仰角速率信号是由速率陀螺测量的,是飞机的机体带动陀螺的壳体绕Oz 轴转动时产生的,主要测量的是飞机机头在俯仰方向的变化率,也就是俯仰角的变化速度。而无风平飞时,俯仰角与迎角基本相同,所以拟引入迎角变化率改善飞机纵向短周期模态阻尼特性,迎角变化率由对迎角信号微分获取。
同时,为实现迎角限制功能,增加飞机纵向静稳定导数,改善飞机纵向短周期无阻尼自振频率,引入迎角反馈信号[1]。为实现中性速度稳定和法向过载限制引入法向过载反馈信号。
2.3 控制律设计
控制律设计时采用以时域设计为主,频域验证为辅的方式。时域设计时要求飞机响应快速,在没有或者尽可能小的超调量的情况下,使飞机达到预期的迎角或者法向过载,且要求稳态精度高,即达到预期值时能精确保持当前的迎角或者法向过载。频域验证时主要要求系统的短周期频率特性应满足GJB 185—86有人驾驶飞机(固定翼)飞行品质的要求,稳定储备应满足GJB 2191—1994 有人驾驶飞机飞行控制系统通用规范的要求。
在控制律设计过程中,将迎角反馈信号经过增益Kα调参直接反馈到平尾,改善飞机纵向静稳定导数和纵向短周期无阻尼自振频率;将迎角微分信号经过增益Kαwz调参直接反馈到平尾,改善飞机纵向短周期模态阻尼特性。被控信号通过取大取小逻辑进行切换,迎角较小时,为了实现中性速度稳定和法向过载限制,引入法向过载反馈信号作为被控信号;迎角较大时,为了实现迎角限制,引入迎角反馈信号作为被控信号。引入纵向杆的输入信号经过指令成形后,与被控信号做差,通过比例(增益为KP)+积分(增益为KI)的控制方式生成平尾控制指令,平尾作动器按平尾控制指令驱动舵面偏转,控制飞机产生俯仰方向运动。 Kα、Kαwz、KP、KI等参数随高度和马赫数调参。 纵向控制律框图如图2 所示。
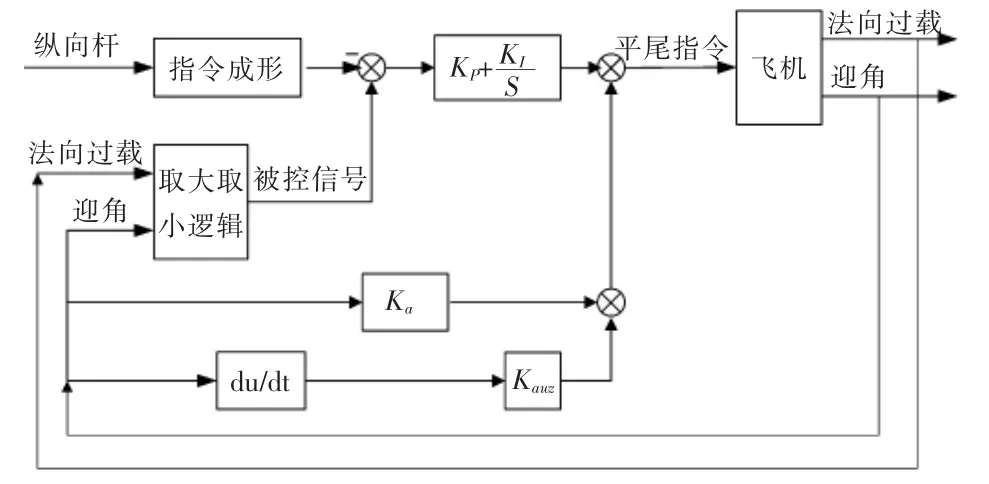
图2 纵向控制律框图
3 仿真计算与飞行品质分析
为验证纵向控制律是否满足设计要求,以某型飞机为平台,进行了仿真计算和飞行品质分析。从时域响应、短周期反应和稳定储备等方面进行了计算分析。 计算时选取了小速度状态点1km、0.3M 验证指令迎角支路接通时的飞行品质;大速度时选取1km、0.7M 状态点验证指令过载支路接通时的飞行品质。
3.1 飞机方程数学模型
控制律设计和仿真计算时以某型飞机为平台建立飞机动力学仿真模型。飞机方程采用的运动方程组为“机体—机体”体系(T-T 体系),即飞机质心的动力学方程和转动的动力学方程都在机体坐标系中建立。飞机方程模型的方程组及公式如式(1)~式(12)所示[2]:
3.2 时域响应计算分析
时域响应计算分析时,采用阶跃响应的分析方法。即飞机在平飞状态下输入阶跃杆指令进行仿真计算,可以得到飞机纵向飞行品质以及飞机在各模态下的时域响应曲线。
在仿真计算时,将仿真时间设置为7s,在1s~5s时施加纵向杆位移为Dz=-90mm 的阶跃输入。飞机的时域响应曲线结果见图3~图4,由仿真结果可知,在阶跃杆指令输入后,小速度时,迎角建立迅速,达到指令的迎角后几乎无超调并且能精确保持,迎角限制功能正常;大速度时,法向过载建立迅速,达到指令过载后过载无超调并且能精确保持,法向过载限制功能正常,满足控制律的设计要求。

图3 飞机纵向时域响应曲线(H=1km、M=0.3、Dz=-90mm)
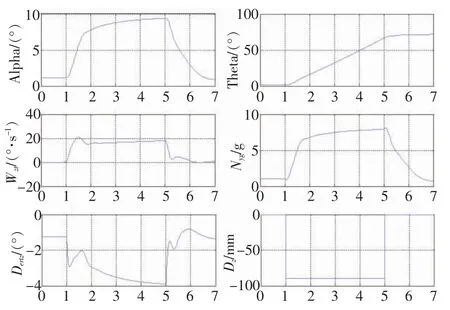
图4 飞机纵向时域响应曲线(H=1km、M=0.7、Dz=-90mm)
3.3 短周期反应
GJB 185—86 规定,在速度近似不变时,由于微小扰动或者突然的俯仰操纵所产生的短周期操纵期望参数CQC 标准1 在0.28~3.6 之间,标准2、3 在0.16~0.28 或者3.6~10 之间(战斗阶段)。短周期阻尼比标准1 时应满足在0.35~1.3 的范围内,标准2 应在0.25~0.35 或者在1.3~2 之间。
由计算结果可知,计算状态点的短周期频率和操纵期望参数均满足GJB 185—86 规定的标准1 要求,见图5;短周期阻尼比满足GJB 185—86 规定的标准1 要求,计算结果见表1。

表1 短周期特性参数
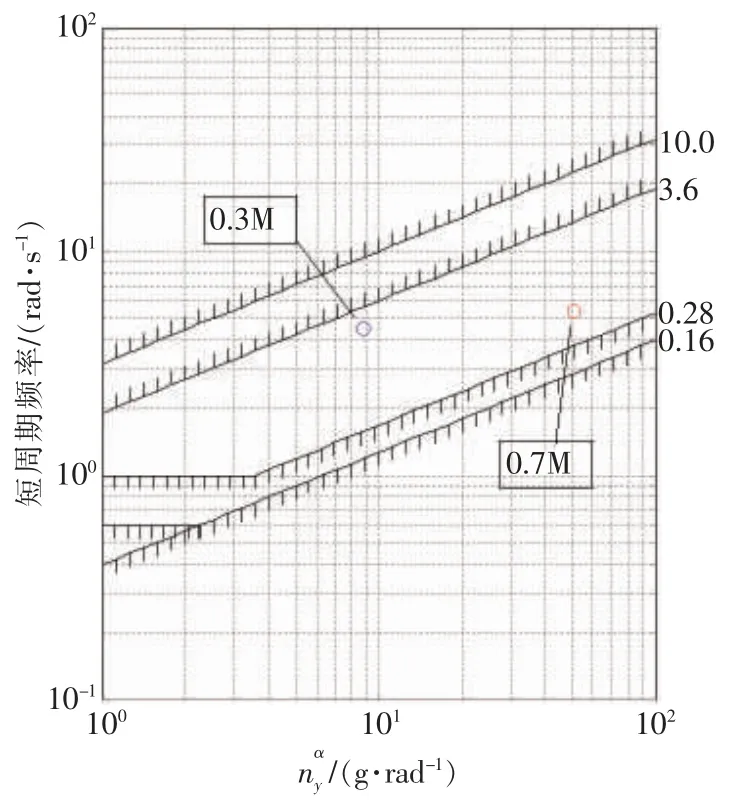
图5 短周期频率要求
3.4 稳定储备计算分析
在GJB 2191—1994 中,规定所有采用反馈控制的飞行控制系统都应具有稳定裕量,幅值裕量GM 大于等于6dB,相位裕量PM 大于等于45°。
在频域计算分析时,飞机在闭环状态下对飞机施加幅值为1°、频率为0.1Hz~6Hz 的正弦波激励,可得到飞机在相应状态点的闭环频率响应曲线和稳定裕量。
两个状态点的闭环频率响应曲线见图6 和图7。由图可知两个状态点的幅值裕量都大于6dB,相位裕量都大于45°,满足要求。

图6 状态点(H=1km、M=0.3)闭环频域响应曲线GM=20.453,PM=82.49
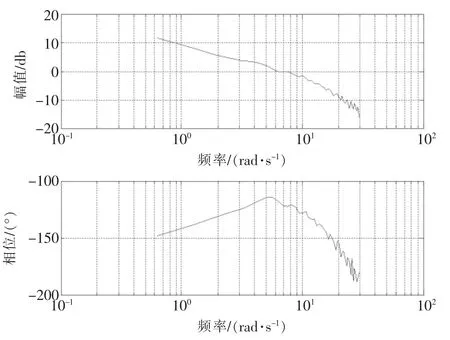
图7 状态点(H=1km、M=0.7)闭环频域响应曲线GM=12.17,PM=61.81
4 结语
本文提出了一种基于迎角和法向过载反馈的纵向控制律的设计方法,在没有采用俯仰角速率的情况下,通过引入微分环节解算迎角的变化率,将迎角变化率经增益调参反馈到平尾指令。以某型飞机为对象,采用该方法进行了控制律设计、仿真计算和品质分析,结果表明该方案较好地提高了飞机纵向短周期阻尼比,改善了飞机纵向短周期操纵特性,满足相关设计要求。
猜你喜欢
水文地质工程地质(2022年2期)2022-04-13 09:02:34
直升机技术(2021年4期)2022-01-12 13:18:12
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
大飞机(2018年1期)2018-05-14 15:59:08
光学精密工程(2016年1期)2016-11-07 09:02:03
中国铁道科学(2015年4期)2015-06-21 06:46:02
航空学报(2015年4期)2015-05-07 06:43:33
科技传播(2014年4期)2014-12-02 01:59:42
实验技术与管理(2014年12期)2014-03-11 18:38:28
