
应用于周界安防的防区型分布式光纤振动传感系统
2023-07-25 10:17刘澜涛范鑫烨赵和宁毕丽平朱存光牛慧娟房文敬
聊城大学学报(自然科学版) 2023年3期
刘澜涛,范鑫烨,2,赵和宁,毕丽平,朱存光,2,牛慧娟,2,房文敬,2
(1.聊城大学 物理科学与信息工程学院,山东 聊城 252059; 2.聊城大学 山东省光通信科学与技术重点实验室,山东 聊城 252059)
1 引言
光纤传感系统能够灵敏地感知压力和振动信号,并具有传感和信号传输功能,可以实时监测直接或间接传输到光纤的各种干扰,将传感光纤上的微小振动转化为电信号,并传输到信号处理系统进行分析、处理和智能识别,对监控区域内的入侵行为进行报警。分布式光纤传感系统是将传感光纤沿场排布,并通过检测技术测量或监控沿光纤传输路径的空间分布和时变信息[1]。在分布式测量中,传感光纤上的每个点都可以作为传感单元,不存在盲区。所以,分布式测量能够实现沿光纤长度的连续检测,降低光纤传感系统的误报率和漏报率。分布式光纤振动传感系统因其在安全防范、全分布式传感和大范围测量等方面的显著优势,在国内外越来越受到人们的重视[2]。防区型分布式光纤传感系统是分布式光纤传感系统的一种,它由许多防区组合而成,当振动发生于某一防区时,此防区探测到振动信号,通过解调技术得知振动产生的位置,将振动信号定位至这一防区[3]。因其结构简单、便于铺设且适合大范围的测量振动信号,它被广泛应用于入侵防范、机械故障诊断和输油管道泄漏等监测领域。
迈克尔逊干涉仪是一种基于干涉技术的光纤传感器,具有灵敏度高、响应速度快等优点。与马赫曾德尔干涉仪相比,迈克尔逊干涉仪可以有效避免偏振态衰落对光纤传感系统的影响,适合构成防区型分布式光纤振动传感系统[4]。它利用正向传光信号检测被测量,可以获得高信噪比的信号,适用于静态信号和动态信号的测量,且其通常选择低相干光源作为入射光,光强与传感结构的相位差有关。因其具有结构简单、条纹对比度好、信噪比高、条纹数与测量位移的计算关系简单等优点而受到广泛的研究和应用。然而,当光被迈克尔逊干涉仪中的反射镜反射后,光程差变长,导致了干涉条纹可见度的下降,减小了传感器的检测范围。当使用宽带光源时,短相干长度将减小光强范围,存在测量上的局限性。为了消除光纤的偏振效应影响,该系统中往往需要加装保偏光纤,一定程度上增加了系统成本,从而限制了该方案在实际系统中的应用。
本文提出了一种基于NB-IoT的防区型分布式光纤振动传感系统。该系统选用窄带光源、迈克尔逊干涉仪和步进电机的相关结构。偏振光的振动方向可通过步进电机旋转任意的角度,从而获得所需要的偏振态,避免加装保偏光纤的额外开销,节省成本。此外,步进电机的移动所导致干涉光的强弱呈现有规律的变化,改善了迈克尔逊干涉仪干涉条纹的可见度,扩大了传感系统的检测范围,增强了传感系统的实用性。系统能够实现更高的定位精度、探测率和信噪比,且利用NB-IoT技术实现了数据采集、实时通信和远程监控的功能。
2 分布式光纤传感系统
本系统由前端和后端两部分组成,前端放在室内,后端放在室外防护区。前端由光纤振动预警主机、工控主机、传输光缆组成,后端由分割包、终端盒和振动光缆构成。
图1列举了两个防区的光纤传感系统,光纤振动预警主机为整个系统提供光源,分割包和终端盒共同组成了迈克尔逊干涉仪,光经过传输光缆传送到分割包中,再依次传送到振动光缆和下一防区分割包。振动光缆将外界振动信号转换为光信号,然后回送到光纤振动预警主机进行光电转换,预警系统对信号进行采集和数据处理。根据设置的参数,将入侵所在防区显示在工控主机的屏幕上。
2.1 光纤传感系统的前端
图2列举了两个防区传感系统的前端构成图。LD为激光器,为整个系统提供光源。由于1 550 nm光纤损耗小的特点,可以保证良好的传输信息。OI为光隔离器,可以防止光源受到由背向反射或信号产生的不良影响。OS为分光器,激光器发出的光进入分光器中按1∶1的分光比形成两束光路。在实际的工程应用中,分光器可以节省相应的成本,由分光器分出的光进入两路相同的光纤传感系统中。CIR为光纤环形器,PD为光电探测器。光进入环形器后通过2端口输出,且电机上的开关可以控制反射镜使通过2端口的光发生反射,从而通过3端口进入PD1和PD2。电机的作用是旋转光纤,以调节偏振和改善迈克尔逊干涉仪干涉条纹的可见度。步进电机是将电脉冲信号转换成相应位移的电动机。当输入脉冲信号时,转子会产生角度或位移的变化。3端口进入PD1和PD2中的光可以由PD1和PD2把光信号转换为电信号,从而驱动电机的转动。通过软件可以调节电机的旋转方向。G1和G2为干涉仪,光进入干涉仪后,PD3和PD4把光信号转换为电信号以用于信号的采集。信号采集板把采集到的信号进行处理后通过电脑输出和显示,并根据相应的波形图来判断报警信息[5]。

图2 传感器系统组成示意图
2.2 光纤传感系统的后端
光纤振动预警系统本质上是一种干涉型光纤传感器。图3是两个防区的光纤传感系统后端的组成示意图,两端是系统的终端盒,中间则是分割包,图中FRM是反射镜,C1和C2是滤波器。
系统的传感方式采用迈克尔逊干涉仪,并通过单模光纤迈克尔逊干涉仪来测量振动信息[6]。两个干涉臂为普通单模光纤。从激光器输出的激光通常具有很好的相干性。相干光在整个传播过程中保持相同的相位差、频率或波形。这样的两束光可以在传播过程中产生稳定的干涉,也就是相长干涉、相消干涉[7]。激光在分束后合并产生稳定的相干条纹,通过相干激光动态调制技术[8],将探测灵敏度锁定在最高位置,使得探测均匀性得到保障。
迈克尔逊干涉仪通过调整干涉臂的长度和改变介质的折射率可以获得干涉中两个光束的不同光程,从而形成不同的干涉图样[9]。迈克尔逊干涉仪可以将两个光束完全分离,通过镜面平移改变光程差,从而可以方便地测量光路。图4为迈克尔逊干涉仪的结构图。耦合器平分成功率相等的两束光,分别进入参考臂和信号臂,经两臂末端的反射镜作用后沿原光路返回,干涉发生在耦合器处,而后进入光电探测器,从而测得光强信号[10]。

图3 室外防护区组成示意图
如图5所示,外部物理量(应力、应变等)可以改变传输光的相位从而实现相位调制[11]。对于相位调制型光纤振动传感系统来说,主要利用的物理效应为光纤弹光效应,即在光信号传输过程中,当光纤材料受到外力的作用而产生应变时,由于光纤折射率的变化,光信号的传播特性发生改变的效应。
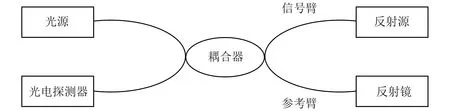
图4 迈克尔逊干涉仪的结构图
由弹光效应引起的折射率变化可用折射率椭球方程的系数改变来表示
(1)
式中Δn为光纤中特定方向上的折射率变化量,ΔX为折射率椭球特定方向系数变化。
在被测物理量的作用下,光纤内部传输的光的相位发生变化。干涉测量技术可以将相位的变化转换为光强的变化,从而检测出被测物理量[12]。光纤传感系统中,把载波光携带的信号转化为光强度的变化就是光的解调过程。当两相干光束同时照射在同一光电探测器上时,光电流的幅值就是两相干光束相位差的函数。两相干光之间的相位差值不能被直接测量,但可以通过干涉条纹通过的明暗变化来反映。因此,可以通过检测回光的光强信号来解调相位差[13]。两相干光束分别称为信号光和参考光,一般来说,参考光不受信号调制,因此光场可以分别表示为
U1=A1exp{i[ω1t+ξ(t)+φ1]} ,
(2)
U2=A2exp[i(ω2t+φ2)],
(3)
式中ω为角频率,ξ(t)为调制量,φ为初始相位,将以上两式相加并整理可得干涉光强信号的表达式为
I=I0+I0kcos[Δωt+Δφ+ξ(t)] ,
(4)
式中Δω与Δφ分别为双光束的角频率差与初始相位差,I0为峰值光强。光电探测器接收的干涉光强度为
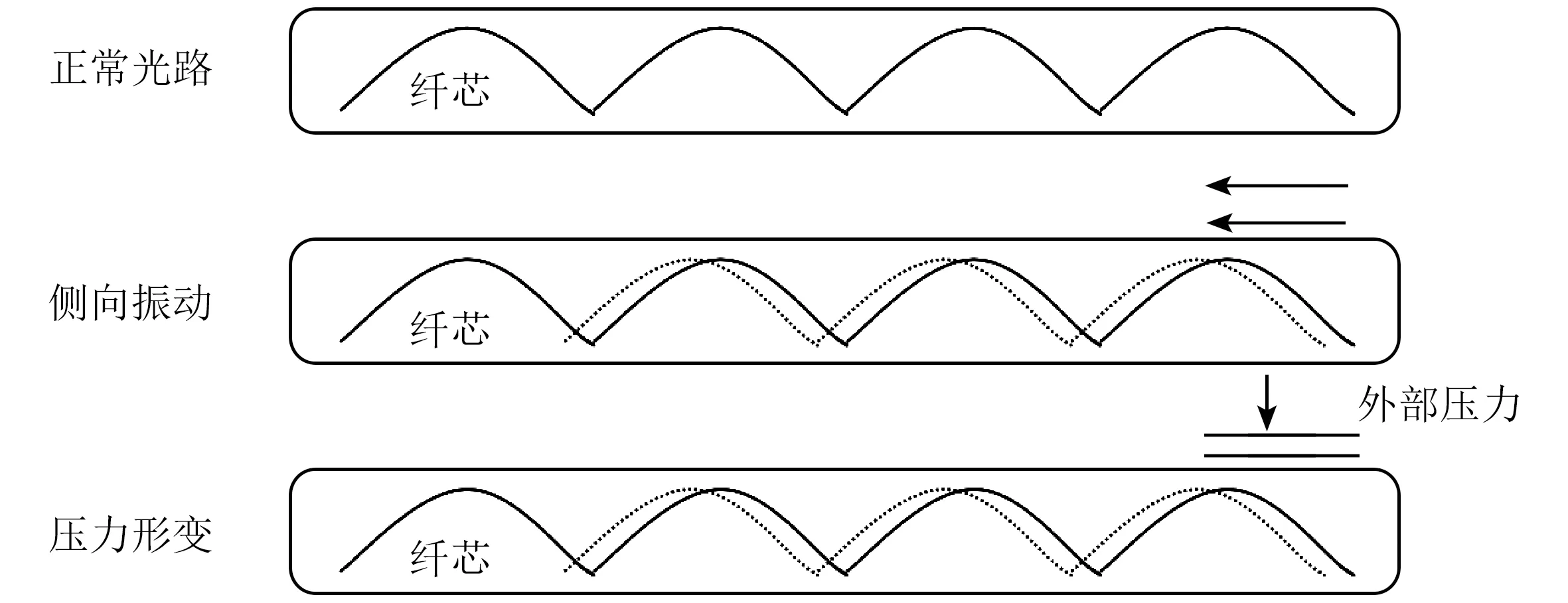
图5 振动和压力使光路发生变化

(5)
式中Δφ=φ1-φ2,φ1和φ2分别为两束光波的初相位;I0为入射光强度;δ为参考臂和传感臂的光衰减系数。去掉直流分量,可以得到
(6)
光电探测器输出电流的变化由两相干光束的初始相位和相位变化决定,通过干涉可以将两光束的相位差转化为电流的变化[14]。本系统正是利用这一原理,把引起的振动解调变换为传输光的相位变化并实现振源的准确定位且直观的在软件界面上显示出来[15]。
3 NB-IoT网络传输单元
图6为网络传输单元示意图,网络传输采用了基于STM32F103的NB-IoT模块,MCU控制器和NB-IoT通信模块之间通过USART串行通信方式进行数据传输。由于NB-IoT接入广、功耗低、覆盖强和成本低的优势,越来越多的被应用于物联网通信应用中[16]。
光纤传感系统由网络传输单元、工控主机、光纤振动预警主机和设置的防区构成。由光纤振动预警主机产生的预警信息,可由NB-IoT网络传输单元传输到云端,并可通过移动设备实时查询[17]。本系统可在云端整理和查询数据,不需要实时在室内观测预警信息。通过NB-IoT技术将采集到的数据上传到云数据库中,进而可以显示到客户端[18]。并可向控制模块发送AT指令,通过移动设备来检测预警信息。
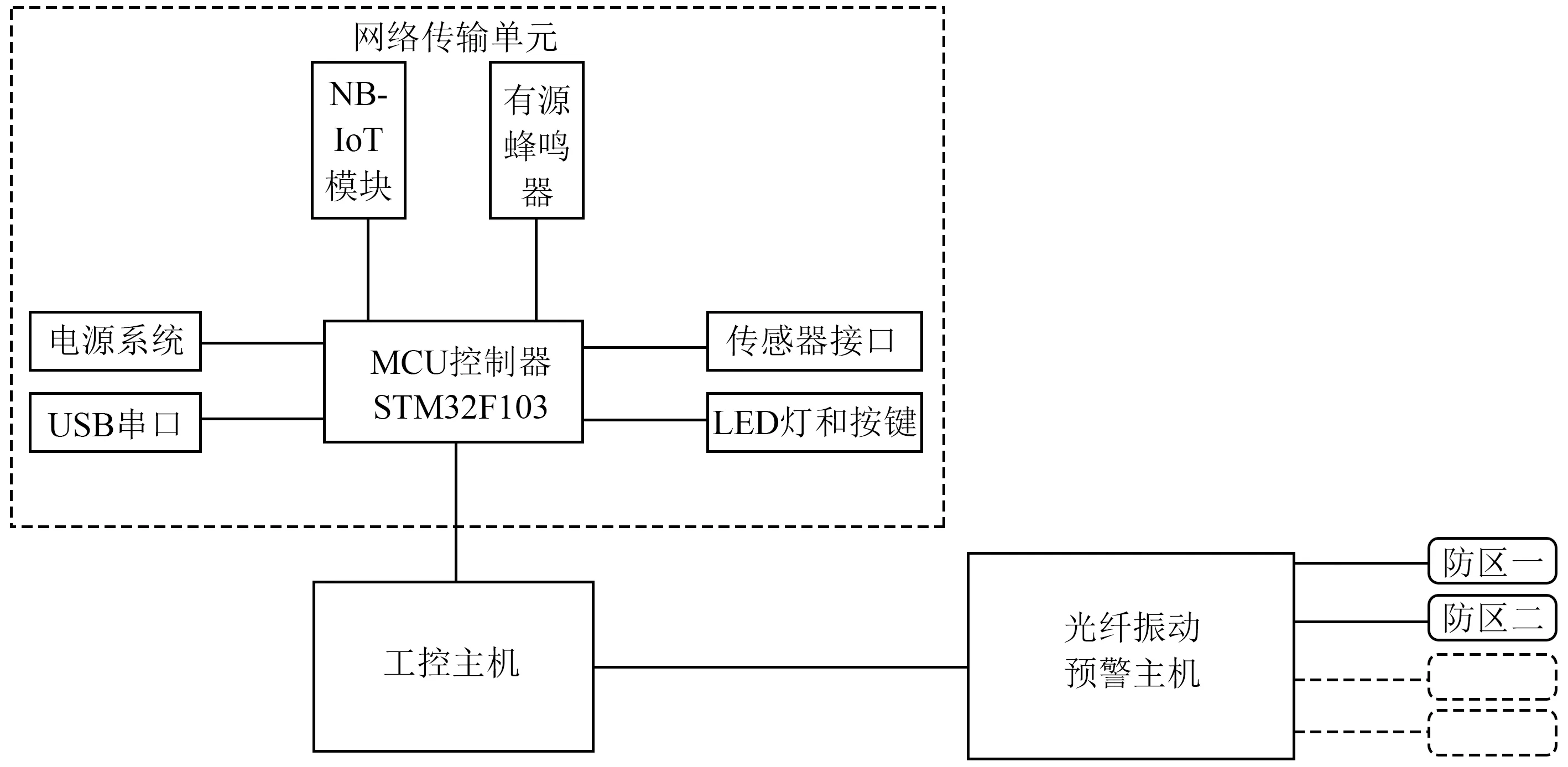
图6 网络传输单元示意图
4 测试结果
图7是声音振动信号直接作用在光纤上产生的波形图,图8是羊角锤敲击光纤的波形图。图中横坐标为采样点,纵坐标表示了振动信号侵入的幅度。在相同幅值和同一光纤长度下设置采样点,通过施加不同力度大小的振动信号,图7的波形图较为稀疏,图8的波形图较为密集,稀疏的波形图代表了较轻的侵入,而密集的波形图则反映了较重的侵入,在同一采样区间内,波峰及波谷的数量多少体现了侵入信号的强度大小。在5 000 个采样点的区间中,波形图的平均波峰数量小于5 个时为轻度侵入信号,5~10 个之间为中度侵入信号,10~20 个之间为重度侵入信号,大于20 个时为超重度侵入信号。系统可以通过波形图的疏密程度来判断外力侵入的等级大小,并根据需要设置相应的报警等级,能够很好的应用在周界安防等领域。
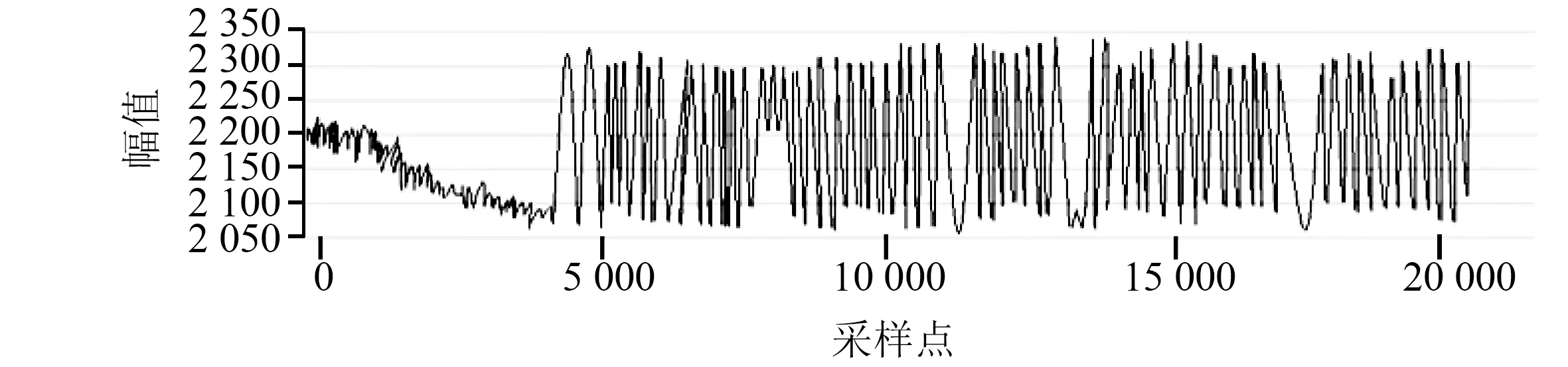
图8 重度侵入波形示意图
埋地测试中,油镐在电力管道上施加振动信号,如图9所示,在15时42分到15时47分的时间段内在光纤传感系统的后端施加振动信号。当光纤感受到振动后,系统的波形图开始发生变化,图中可以明显的看出施加信号的振动标志频率21 Hz和开始及结束的时间。图9的下方能够显示振动信号侵入的幅度大小。图10是施加18 Hz振动信号时光纤传感系统的波形变化图,振动时间持续约15 min,振动的标志频率、幅值和开始及结束的时间能够直观的在图中显示出来。
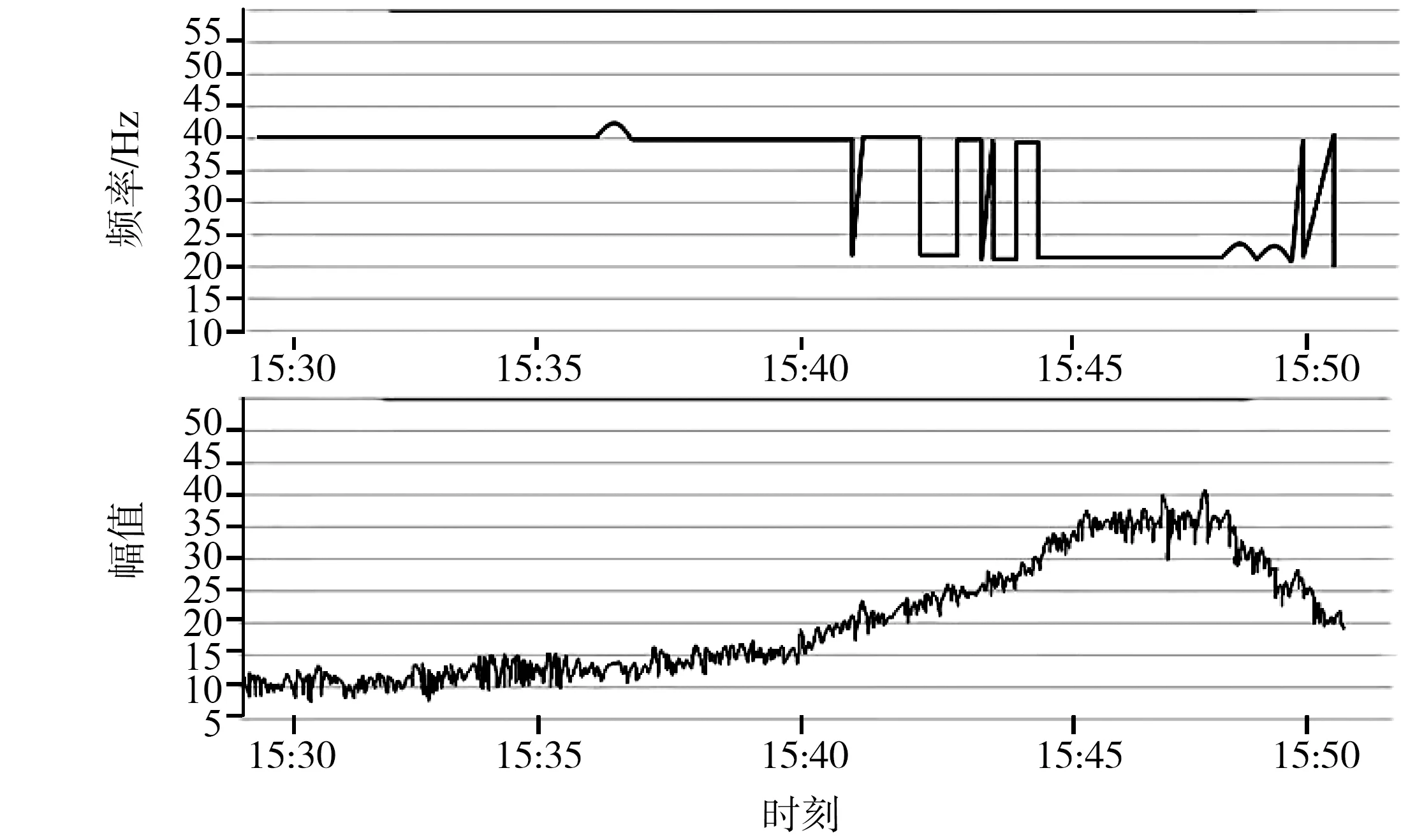
图9 施加21 Hz振动信号的波形图
图11是连续两次外力侵入的波形图。车辆移动过程中,第一次施加的是130 Hz的振动信号,第二次施加的是120 Hz的振动信号。从图中可以看出系统受到了两次的外力侵入,并且有两个不同的波峰变化。
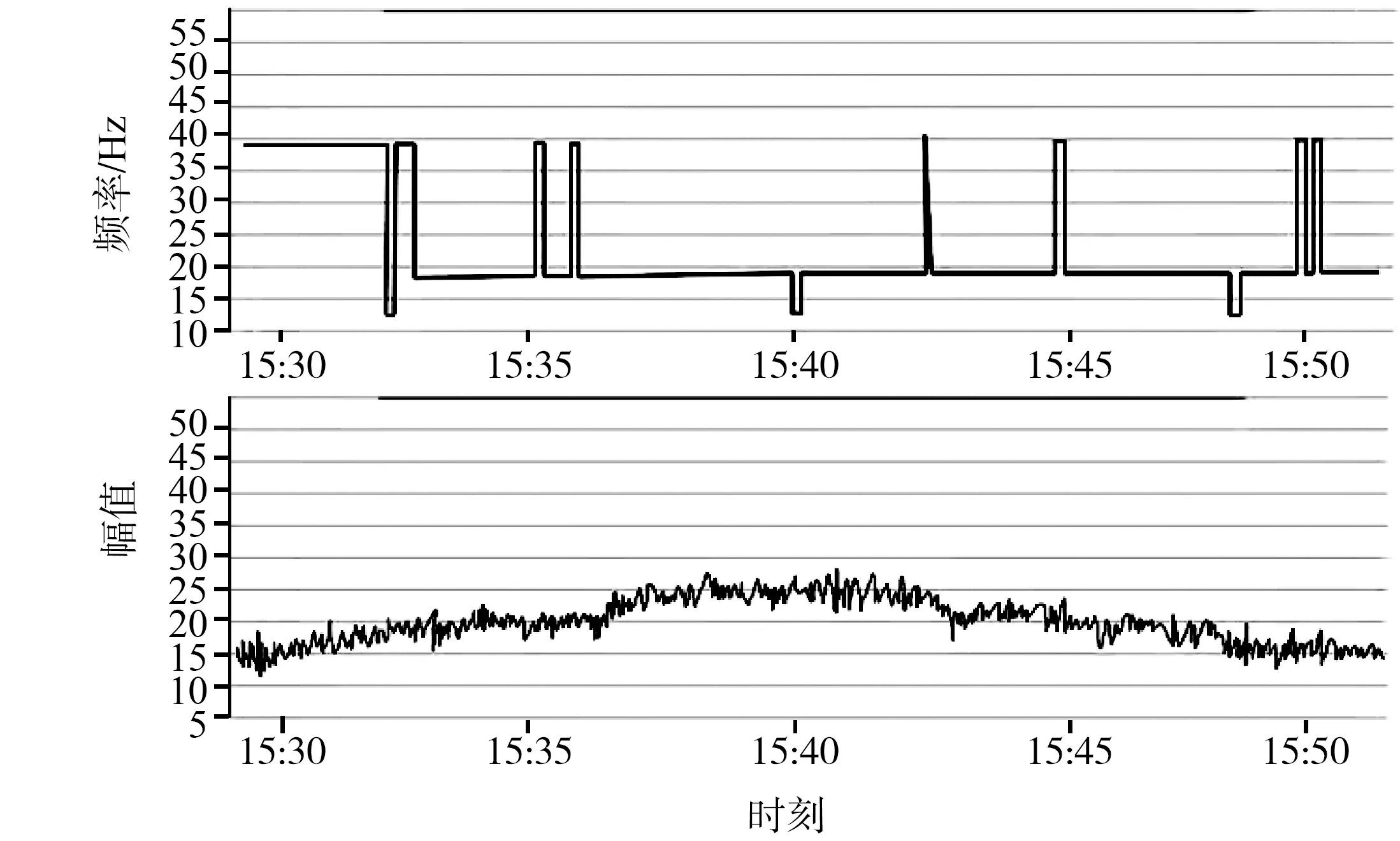
图10 施加18 Hz振动信号的波形图
通过对不同频率振动信号的对比和连续外力侵入的测试,系统可以敏感的检测出振动信息并快速做出判断。软件可以通过时域和频域两个角度观测振动信号,直观的显示出不同的标志频率和振动信号施加的开始时间及结束时间,并且还可以判断侵入信号的幅度大小。当传感系统检测到侵入信号时,便可产生预警信息,并上传到系统日志中。如表1所示,经过多次实验验证,系统的每个防区都可以实现150 m到2 000 m固定范围中小振动信号的探测,并可探测出20 Hz以下的次声波信号,单次报警事件的响应时间小于3 s,发生频率小于每秒10 次时的多次报警事件的响应时间小于5 s,误报率小于每天一次,且连续触碰、敲击两次以上探测率接近100%。
本系统可以通过云数据库建立项目和产品,并由AT指令检测模块的状态,通过AT+CPIN?和AT+CSQ?测试SIM卡的状态和信号强度,AT+TCMQTTCONN设置连接参数并建立云平台的连接。订阅TOPIC后,便可实现云端设备的控制。并由AT+TCMQTTPUB把设备信息上传到云端,最终实现设备之间的联动。通过数据开发的功能实现客户端的推送和移动设备的数据处理。
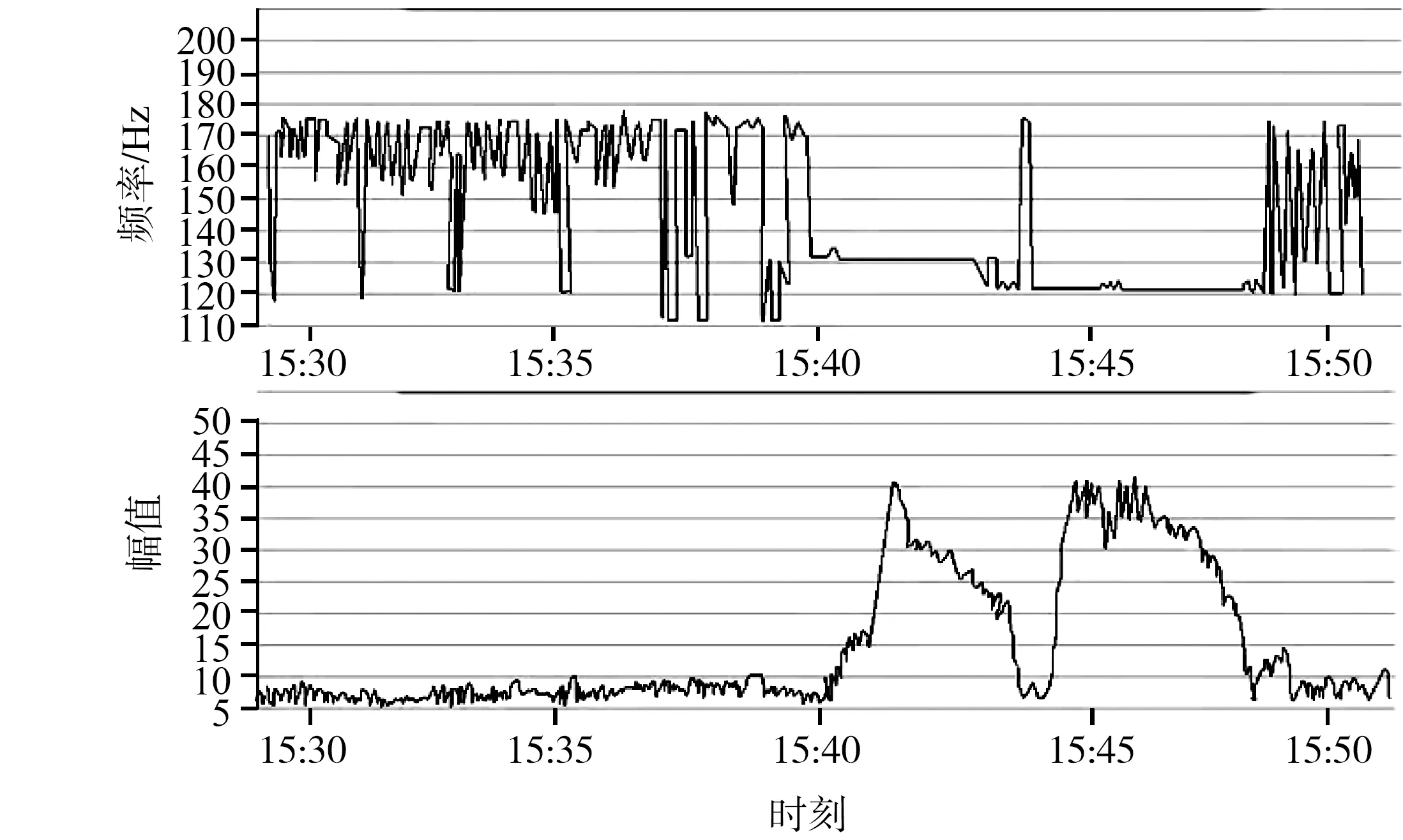
图11 连续两次外力侵入的波形图

表1 光纤传感系统测试数据
5 结语
本文设计了一套基于迈克尔逊干涉仪的新型分布式光纤传感系统。由于成本较为低廉,传感系统能够满足小周界防护和大型设备接近探测的实用性防护,使其能够很好的应用在结构监测、渗漏探测、交通运输、光纤通信、环境测量和工程项目的安全生产中。
系统的前端一部分通过电脑检测振动信号并可判断不同的振动源。当检测到侵入信号后,相应的预警信息便可上传到系统日志中。系统日志可以记录事件发生的时间、地点和类型,并同时记录事件处理时长,对易发地点进行标注。另一部分通过NB-IoT的网络传输单元上传到云端,并可由AT指令控制信息的收发,通过移动设备记录预警信息。若有未处理的预警信息,便可由移动设备给出提醒。同时,上传到云端的数据由客户端实时推送,更便捷的查询预警信息。
系统的后端可以根据不同工程项目所需的光纤长度设置不同的防区数量,并增加相应的分割包和终端盒的数量。当探测出振动信号的时候,就可以锁定是哪个防区产生了预警信息。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
大学物理(2021年2期)2021-01-25
计测技术(2020年6期)2020-06-09
航天电子对抗(2019年4期)2019-06-02
科技创新与应用(2018年13期)2018-06-05
制导与引信(2017年3期)2017-11-02
大陆桥视野·下(2017年9期)2017-09-17
中国地震(2014年3期)2014-09-04
