智能机器人操作系统研究综述
2023-07-23 01:37:58侯人鸾佟琨韩冰于晓龙杨帆
杭州科技 2023年3期
侯人鸾,佟琨,韩冰,2,3,于晓龙,杨帆
(1.北京航空航天大学杭州创新研究院,杭州 310051;2.浙江大学流体动力基础件与机电系统全国重点实验室,机械工程学院,杭州 310027;3.浙江大学,工程师学院,杭州 310015)
0 引言
机器人被誉为“制造业皇冠顶端的明珠”,其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志[1]。当前以机器人、人工智能、5G和数字孪生等先进技术为代表的第四次工业革命正在兴起[2],在加速实体经济和数字经济深度融合发展、传统制造行业转型升级的同时,也给中国制造业实现跨越式发展带来前所未有之机遇。《国际机器人联合会(IFR)报告》指出:全球机器人储备总量已达301.5 万台,机器人产业快速发展。在此背景下,我国机器人产业规模扩展显著,营业收入突破1000 亿元/年,年均复合增长率达到15%[3,4],在除汽车制造、3C 等传统行业外的物流仓储[5]、教育娱乐[6]、医疗康复等行业也正在实现规模化应用[7],不但有力提高了生产水平、生活质量和经济发展动力,而且正在重塑我国经济发展的底层逻辑,成为我国新一轮经济增长的核心驱动力,也是我国抓住“百年未有之大变局”机遇的关键抓手。然而,目前复杂多变的世界格局,也给我国机器人产业的发展带来潜在挑战,特别是给机器人的“大脑”——操作系统以及其融合人工智能、5G等技术衍生的云边端一体化机器人操作系统,带来了潜在的“卡脖子”风险。为此,发展我国自主可控的云边端一体化工业机器人操作系统势在必行。纵观国内外机器人技术与产业发展现状,国外起步较早、积累较厚,国内迎头赶上、势头强劲,具体体现在以下几个方面。
1 国外机器人操作系统技术与产业发展现状
1.1 商用工业机器人操作系统
机器人作为国家高端制造水平体现的代表物,对于其操作系统的研发引起了世界工业强国和有影响力的机器人公司的重要关注,如表1 所示为国外机器人操作系统的典型产品。例如,日本2002 年就在国家战略层面规划了机器人操作系统并形成了OpenRTM-aist 平台[8],其他国家组织也相继推出了Orocos(欧洲)[9]、Player/Stage(美国)[10]、RoBoDK(加拿大)[11]、YARP(微软)[12]等一系列操作系统平台。同时全球各大机器人厂商包括德国的KUKA(2017 年已被中国美的集团收购)、瑞士的ABB、日本的FANUC(发那科)和YASKAWA(安川)都研发了专用机器人操作系统:KUKA和ABB采用VxWorks+自研运动控制算法,而发那科和安川则采用自研嵌入式操作系统和自研运动控制算法。经过数十年发展演进,目前国外四大家族的机器人操作系统都已经相当成熟,在稳定性、实时性和运动控制精度方面优于我国的工业机器人操作系统,但也存在各自为政、互不兼容的局面。
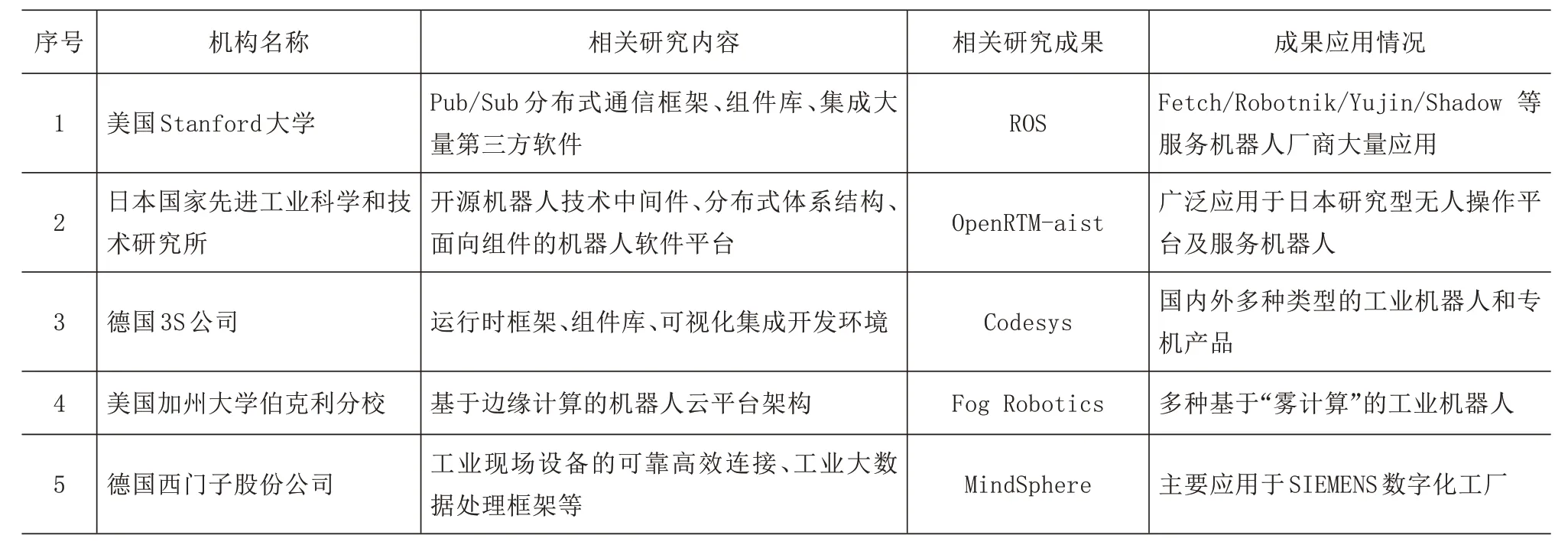
表1 国外机器人操作系统相关技术/产品
1.2 开源机器人操作系统
国外一些机构也推出了一些有影响力的开源机器人操作系统。例如,美国斯坦福大学人工智能实验室推出的ROS(Robot Operating System)[13-15]是一款利用分布式通信机制实现节点间进程通信的松耦合框架,可对各类机器人中间件、功能库和顶层的第三方工具软件,如GAZEBO[16,17]、OpenCV[18]、PCL(Point Cloud Library)[19]、MoveIt[20,21]等集成至ROS 框架当中。ROS 各类机器人中间件均为开源软件,利于研究人员学习,且用户众多,在全球范围内的开发者估计超过10 万(资深开发者3 万左右),但开源软件学习难度普遍较高,终端用户难以学习掌握。另外,ROS 是运行在Linux/Windows 上的亚机器人操作系统,不能独立运行,虽然开源但实时性差,因此ROS主要用于教学和科研,在工业界应用较少(但随着ROSIndustrial[22,23]软件包的出现,ROS在实时性要求不高的移动/服务机器人领域的应用逐渐增多)。
1.3 云平台系统
为了拓展工业机器人基于工业互联网平台上的应用,国外商业公司及组织在工业互联网架构、工业网络技术等方面对已有技术进行了升级改造,并且提出了适用于机器人大数据分析的云端平台。美国GE 推出云平台Predix[24],主要支持工业设备安全监控、工业数据管理、工业数据分析以及云智能技术迁移等功能,其数据采集软件嵌入工业控制系统或网络,可在网关、控制器、传感器节点进行部署,Predix 分析服务开发框架为基于微软Cloud Foundry 框架的PaaS 开发平台[25],企业根据需求可自主开发算法和模型。德国西门子推出基于云的开放式物联网操作系统MindSphere[26],主要依托Nano 网关型硬件产品实现即插即用,提供云端连接数据采集/开发API与西门子的众多硬件产品进行以太网通讯,但其仅支持西门子S7 通讯协议或OPC UA 协议[27]。随后瑞士ABB提出ABB Ability 工业云可视为“边缘计算+云”体系架构[28],分别由端设备与传感器、DCS+电控+安全一体化的中间层自动化系统、端到端工业数字化解决方案以及开放工业云平台四部分组成。菲尼克斯电气推出的ProfiCloud 工业云平台[29]采用云耦合器通过Profinet 网络添加多个设备,并采用分布式控制器远程控制PROFINET IO 子站[30],菲尼克斯电气开放式控制平台PLCnext[31],可支持各类工具软件如Visual Studio、Eclipse、Matlab Simulink、PC Worx等并行工作[32,33],共享数据信息资源。除商业公司外,美国加州大学伯克利分校提出了基于“雾计算”的机器人云平台架构[34-36],用以支持工业大数据处理和智能服务,相比以上商用工业平台而言其功能较为有限,但商用私有云平台大多仅支持某类总线、设备适配也存在一定局限性。
2 国内机器人操作系统技术与产业发展现状
近年来,国内科研机构和企业也加速了国产机器人操作系统的研发进程[37],加强了机器人操作系统、工艺优化、预测性维护等核心技术攻关[38],推进了人工智能、5G、大数据、云计算等新技术与机器人技术的融合应用[39],相关研究如表2所示。在工业机器人操作系统领域,北航自主研发了国产机器人操作系统ROSC[40],具有开放式、跨平台、强实时和组件化等特点。翼辉公司拥有完整自主知识产权内核的SylixOS实时操作系统,支持对称多处理器(SMP)平台,并且具有实时进程及动态加载机制,支持ARM、MIPS、PowerPC、X86、SPARC、DSP、RISC-V、C-SKY、LoongArch 等架构处理器,便于系统开发与调试,加快软件研发速度[41]。钱江机器人公司推出了具有核心知识产权的QJR系列工业机器人操作系统,提供了高性能运动控制接口[42]。新时达公司以运动控制技术为核心,基于多轴同步、总线控制、平台化控制、多机协同、免调试自适应等自有核心技术,提供包括从伺服驱动、运动控制到集成化的应用,从单机自动化到智能制造的多层次解决方案[43]。极智嘉公司提出了基于5G 和云-边-端协同计算的移动机器人操作系统,提高机器人智能性的同时降低硬件成本[44]。

表2 国内机器人操作系统相关技术/产品
在拓展工业机器人基于互联网平台上的应用方面,我国工业互联网产业联盟(AII)发布了工业互联网体系架构,以工业机器人、数控机床等核心装备为支撑提出了“三层级四环节”的工业互联网逻辑架构[45]。航天科工发布的工业互联网云平台INDICS 提供涵盖IaaS、DaaS、PaaS 和SaaS 的完整工业互联网服务功能,典型应用包括工业智能生产线,可由布置在商密网服务器上总控系统导入MES系统的任务信息,执行加工工艺的同时基于采集数据优化工艺流程[46]。海尔COSMOPlat 工业互联网平台依托RFID 物联网技术可执行大规模定制化服务,主要应用在智慧服装定制领域[47]。三一集团的树根工业互联网平台为设备厂商增加远程控制、个性化的参数设置等功能,并根据大数据信息,为设备运维提供指导帮助,具体包括远程诊断、在线故障处理等服务[48]。用友集团的精智工业互联网平台是基于用友云面向工业企业的智能云平台,平台以基础技术支撑平台、容器云平台、工业物联网平台、应用开发平台、移动平台、云集成平台、服务治理平台以及DevOps 平台为支撑,融合了移动互联网、云计算、大数据、物联网、人工智能、区块链等现代信息网络技术[49]。浪潮M81 工业互联网平台采用双模IT 架构,实现海量异构工业数据集成,提供开放API、SDK,与开发者共享平台资源[50]。杭州阿里集团基于阿里云大数据一体化计算平台发布ET 工业大脑,主要特点在于支持云和端一体化,在云上提供海量数据挖掘分析,并实现复杂算法模型训练,训练好的智能服务能够以轻量级模式在本地工业端部署运行,为树根互联、海尔集团、航天科工集团分别推出了平台解决方案[51]。国内工业互联网云平台与国外平台一样存在仅支持固定网络接入协议,尚未形成云边端一体化工业机器人系统平台。
此外,国内机器人操作系统和云端应用研究的另一个明显趋势是对服务类机器人的技术创新和产业应用[52],如北京光年无限科技有限公司的图灵机器人操作系统TuringOS[53]、小I 机器人云操作系统iBotOS[54]、智能机器人操作系统Roobo等,但是这些系统都存在难以兼容复杂工业应用的问题。国内知名的工业机器人公司,如新松、埃夫特、埃斯顿、汇川、华中数控、珞石等,目前主流采用“风河/RT-Linux、WinCE[55]、QNX 或RTEMS+自主研发专用机器人中间件”作为自己机器人研发平台,但也是各自为政,彼此互不兼容,云边端协同的工业机器人智能云服务目前还处于概念阶段。
3 机器人操作系统发展趋势
以PC Windows 和智能手机操作系统发展历史为鉴,就全球机器人行业来说,迫切需要一个或几个基于云边端协同的开放式机器人操作系统的一体化开发平台,而这个平台核心就是“开放式、强实时多核计算机操作系统内核+分布式通信机制+云边端协同智能服务+一体化集成开发环境”。该平台能够在很大程度上解决目前机器人研发面临的学习和开发难度大、代码可重用性差、无法跨平台、缺少云端应用等问题,提升开发质量、开发效率和开发一致性,降低开发门槛、开发周期和开发成本。鉴于此,下一代机器人操作系统发展趋势表现在以下四个方面:
3.1 高可靠、开放式、强实时内核计算机操作系统
VxWorks[56]、QNX[57]和RT-Linux[58]都是采用单晶内核设计,存在内核规模大、配置关系复杂和占用资源多等问题[59]。而微内核设计把功能模块作为用户进程运行,操作系统内核缩减到最小,具备占用资源少、实时性强、可靠性高等优势。
3.2 分布式通信与松耦合协作
随着机器人系统网络化和智能化发展,消息通信的实时性成为机器人操作系统的关键指标[60]。以数据为中心的“发布/订阅”通信机制已应用于ROS[61],但其缺乏对实时性的支持[62-64]。近年来,国内在面向分布式实时通信领域,北航、国防科大等单位在机器人操作系统实时性改进方面做了大量工作[65、66]。
3.3 云边端无感协同的智能服务
工业生产过程中机器人高频数据采集,往往会给网络传输、平台存储与计算处理等方面带来性能和成本上的巨大压力,在边缘层进行数据的预处理和缓存,在云端进行智能化的工艺应用优化和预测性维护[67-69],是未来机器人企业在云边端协同上需要突破的瓶颈[70-72]。
3.4 标准化机器人功能组件与集成开发环境
针对传统机器人功能组件封闭不开放、难以优化和重用的痛点,机器人厂商提供了多种应对策略,但仍然存在工业现场人员学习使用难度大、模块抽象扩展困难的问题[73,74],需要提高机器人操作系统组件标准化和跨平台程度,迫切需要建立一体化机器人集成开发平台[75,76]。
猜你喜欢
金桥(2020年8期)2020-05-22 06:22:38
金桥(2020年8期)2020-05-22 06:22:26
金桥(2019年10期)2019-08-13 07:15:16
黄河之声(2018年5期)2018-05-17 11:30:01
Coco薇(2015年10期)2015-10-19 12:51:50
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:54:51
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19