加速指令前馈控制策略在超超临界机组CCS优化应用
2023-07-22 07:56:28姜静波
黑龙江电力 2023年3期
姜静波
(山西潞光发电有限公司,山西 长治 046000)
0 引 言
作为660 MW单元机组控制重要组成部分,协调控制系统是机组带常规负荷、完成负荷升降、保证机组安全稳定运行的控制灵魂。协调控制系统具有大惯性、强耦合等特点,在实际的逻辑组态中,常用到串级控制、反馈-前馈控制、惯性、独立微分前馈等手段,来弱化机炉之间的耦合性,增强两个主机之间的供需平衡。
超超临界机组协调控制难点之一,为变负荷工况控制如何更好维持锅炉侧压力稳定问题。即在负荷指令增长时,锅炉侧反应滞后,导致锅炉侧出现一定程度的欠压现象,此时汽轮机又舍弃功率调节,反向调节压力,影响机组适应负荷能力。
近年来,随着自动发电控制(automatic generation control,AGC)技术的引入,单元机组快速响应电网变负荷需求,维持自身参数稳定也愈发重要。因此,在机组负荷指令出现上升或下降时,及时进行指令干预,在确保锅炉能够快速响应汽机负荷要求的同时,保持机前压力稳定,已成为重要研究课题。
1 直接能量平衡技术
某660 MW超超临界机组协调控制技术采用直接能量平衡(direct energy balance,DEB)控制策略,此种控制策略能够很好地解决锅炉响应慢及汽轮机调门快速响应负荷的问题,即将锅炉、汽轮机作为一个整体进行控制。常规情况,锅炉对机前及调节级压力进行控制,汽轮机通过快速开大或关小调门,响应电网负荷。当主汽压力出现较大偏差工况时,此时汽机通过动作调门方式,参与压力调整[1]。
直接能量平衡控制技术是由L&N公司在1957年首次提出,历经多年技术革新,发展到现阶段普遍被认可应用的控制理论,DEB控制技术主要基于如下信号进行压力控制,其计算式为
LEXO=p1/pT
(1)
式中:p1为汽轮机第一级压力;pT为汽轮机的机前压力;LEXO为汽轮机有效阀位。
LEXO作为汽轮机阀位的有效值,不受阀门运行方式及锅炉侧的扰动影响,可代替汽轮机的阀门开度反馈信号使用。将上述信号与调门前压力定值相乘,得到锅炉需求能量QB:
QB=po·p1/pT
(2)
式中:po为汽轮机调门前压力定值。
将调门前压力乘以阀门开度值,作为汽轮机实际能量需求信号,以反映汽轮机快速响应电网负荷要求,进而调节锅炉侧的子控制系统,确保机炉之间的能量平衡[2]。
对该机组的协调控制系统进行分析发现,该机组在常规定负荷控制,或小范围升降负荷时,能够很好地适应负荷指令需求,维持自身参数稳定。但在要求机组大范围、快速升降负荷时,容易出现机前欠压现象,汽轮机GV1(1号主汽调门)、GV2(2号主汽调门)在按照要求快速响应负荷要求时,又必须回关部分调门开度,以保证机前压力稳定。因而整体表现出,机组在快速响应负荷指令性能不高现象。对锅炉主控PID进行分析发现,该PID采用负荷指令F(x)函数、主汽压力设定值与过程值偏差微分作为前馈信号,在负荷变化时,能够快速叠加前馈量,但在操作员手动输入升负荷速率时,其整体负荷响应性能较差。此时汽轮机则通过开大或关小调门进行保压操作。
因此,通过引入加速指令这一概念,将加速指令叠加到给水控制、燃烧控制等两个子模块中,以更好适应手动输入升降负荷率工况及大范围升降负荷工况,快速响应负荷指令需求[3]。
2 660 MW机组变负荷热控优化
2.1 给水加速指令
给水加速指令在协调控制里叠加在给水指令,主要基于负荷指令的变化速率的函数,并依据负荷指令的变化速率上升及下降段,分别给出对应的加速输出值。给水加速指令变化速率可依据机组负荷指令的变化速率上升与下降段进行分别设定,进而合理地控制给水加速指令。通过机组负荷变化率设定值、当前负荷与目标负荷偏差、机组负荷指令三个信号对给水加速指令进行修正,形成修正系数,并与给水加速指令相乘。当机组发生辅机故障减负荷(run back, RB)工况、汽机跟随模式(turbine follow mode,TF)工况、锅炉跟随模式(boiler follow mode, BF)工况时,给水加速指令强制为0。给水加速指令逻辑SAMA图如图1、图2所示。
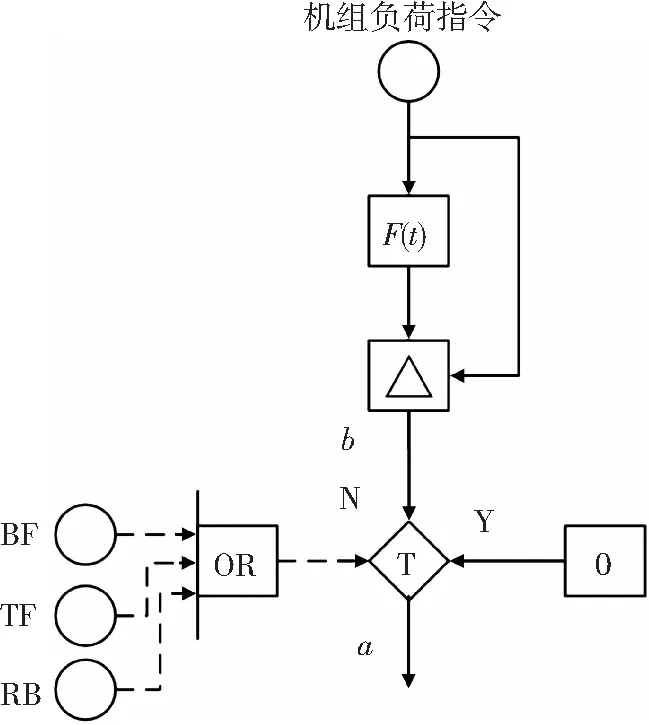
图1 给水加速指令微分部分SAMA图

图2 给水加速指令升降负荷乘微分权重部分SAMA图
图1中,a为机组负荷指令微分函数,生成加速度指令最终计算结果;b为机组负荷指令微分计算初结果;T为机组负荷指令微分数值切换开关;当TF、BF、RB任意一个开关量工况时,切换开关T执行Y=1的输出,即为0;当无TF、BF、RB开关量工况时,切换开关T执行N=0的输出,即为a。机组负荷指令经过微分函数,生成加速度指令最终计算结果a。机组在TF模式、BF模式、RB模式三种情况下,给水加速度指令不参与逻辑计算,即经过切换开关T将加速度信号[4]切成0。图2中,F(x3)为机组升负荷折线函数,F(x4)为机组降负荷折线函数,a与升降负荷判断F(x3)、F(x4)相乘后,得出最终的给水加速度指令信号。
2.2 燃料量加速指令
与给水加速指令设计同一理念,燃料加速指令在协调控制里叠加在燃料指令,主要基于负荷指令的变化速率的函数,并依据负荷指令的变化速率上升及下降段,分别给出对应的加速输出值。燃料加速指令变化速率亦可依据机组负荷指令的变化速率上升与下降段分别进行设定,进而合理地控制燃料加速指令。通过机组负荷变化率设定值、当前负荷与目标负荷偏差、机组负荷指令等3个信号对燃料加速指令进行修正,形成修正系数,并与燃料加速指令相乘。当机组RB工况、TF工况、BF工况时,给水加速指令强制为0。燃料加速指令逻辑SAMA图如图3所示。

图3 燃料加速指令升降负荷乘微分权重部分SAMA图
机组在TF模式、BF模式、RB模式三种情况下,燃料加速度指令不参与逻辑计算,即经过切换开关T将加速度信号切成0。图3中,F(x5)为机组升负荷折线函数,F(x6)为机组降负荷折线函数。机组负荷指令经过微分函数,生成加速度指令最终计算结果a,a与升、降负荷判断F(x5)、F(x6)相乘后,得出最终的燃料加速度指令信号。
3 热工控制逻辑优化结果
逻辑优化后,对机组变负荷工况进行分析,如图4、图5所示。

图4 优化前升负荷给水-燃料-压力-功率曲线
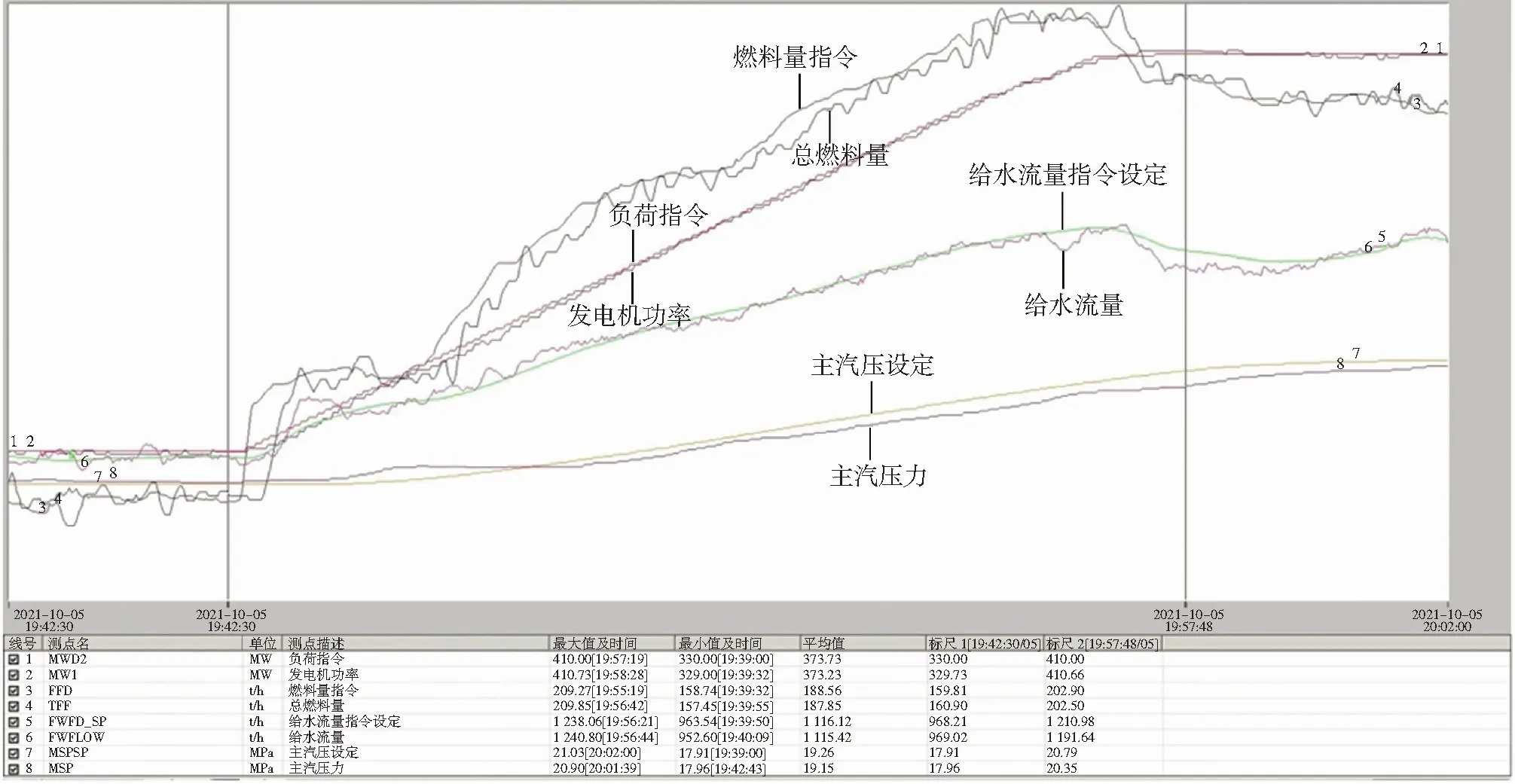
图5 优化后升负荷给水-燃料-压力-功率曲线
图4为优化前的升负荷过程中,给水-燃料-压力-功率曲线。从图中可看出,在协调发出升负荷指令时,给水及燃料反应相对滞后,滞后一直持续整个升负荷过程,导致锅炉侧一直处于欠压的状态,影响功率过程中与功率指令的拟合[5]。
对CCS控制系统进行优化,通过增加给水加速指令及燃料量加速指令,即将一定前馈量叠加在给水主控及燃料主控之中,使得机组在变负荷过程中,给水及燃料指令能够很好适应变负荷工况,如图5所示,在汽轮机快速开关调门时,锅炉侧能够很好地进行压力输出,机组保持较好的协调控制水平。
4 结 语
超超临界直流炉协调控制核心,即在保证机组快速响应负荷指令的前提下,维持机前压力及其他重要参数稳定,确保能量被持续、快速输送。通过逻辑优化,能够使机组在变负荷工况下,锅炉侧的给水及燃烧快速动作,更好解决了变负荷工况控制锅炉欠压问题。对同类型机组响应电网AGC指令差问题具有一定借鉴意义。但此次控制回路优化及升降负荷试验是在锅炉燃烧设计煤种状况下进行,对后续掺烧高硫份、低热值劣质煤时,加速度前馈作用需进一步优化,叠加回路效果需增强,以更好适应变负荷工况,控制机前主汽压力稳定。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
数学物理学报(2021年2期)2021-06-09 08:54:26
能源工程(2020年5期)2021-01-04 01:29:00
数学物理学报(2019年5期)2019-11-29 07:46:34
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
广西电力(2016年4期)2016-07-10 10:23:38
工业设计(2016年4期)2016-05-04 04:00:23
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30