基于组合扫描的无状态工控设备资产探测方法
2023-07-21 07:50:18郑铁军张宏杰贺建伟雍少华孙知信
计算机技术与发展 2023年7期
郑铁军,王 齐,张宏杰,贺建伟,雍少华,孙知信
(1.国网宁夏电力有限公司,宁夏 银川 750010;2.国网智能电网研究院有限公司,江苏 南京 210003;3.信息网络安全国网重点实验室,江苏 南京 210003;4.国网中卫供电公司,宁夏 中卫 755099;5.南京邮电大学 现代邮政学院,江苏 南京 210003)
0 引 言
工业控制系统(Industrial Control System,ICS)是电力、冶金、交通、能源等工业基础设施的核心组成部分,也是国民经济、社会运行和国家安全的重要基础。自2019年以来,受全球新冠疫情的影响,很多工作人员不得不在家里通过虚拟专用网络(Virtual Private Network,VPN)连接ICS实现居家办公,这加速了公共互联网与工业控制网络的融合,使工业控制网络与公共互联网的界限变得越来越模糊,打破了ICS的封闭性,导致ICS也将面临公共互联网中存在的各种安全问题[1-2]。
国家计算机网络应急技术处理协调中心CNCERT发布的《2021年上半年我国互联网网络安全监测数据分析报告》显示[3],大量暴露在互联网的工控设备类型有串口服务器、可编程逻辑控制器等;存在高危漏洞的系统涉及电力、石油、煤炭、城市轨道交通等重点行业,覆盖企业生产管理、企业经济管理、政府监管、工业云平台等。由于暴露在互联网中的工控设备类型越来越多,ICS应用行业越来越丰富,运行环境越来越复杂,ICS面临着前所未有的挑战。如果不能很好地防范ICS的安全,那么一旦被攻击带来的人力物力财力等各方面的损失将是不可估量的。思科的Talos安全研究团队在2018年发文指出美国罗克韦尔自动化公司的Allen-Bradley MicroLogix 1400系列可编程逻辑控制器中存在多项严重安全漏洞[4],一旦被黑客利用,很可能会发起拒绝服务攻击、篡改设备配置、修改内存模块上的数据等。因此,解决和强化ICS安全问题的关键是通过网络资产探测技术实时监测工控设备的资产信息,及时发现系统漏洞[5-6]。
工控设备资产探测的流程主要包括:端口探活、协议数据包构造、通信连接建立和数据收集。首先,对工控设备进行端口探活,获取运行指定工控协议的设备;然后,构造对应协议的探测数据包,与目标设备经过三次握手建立通信连接;最后,根据目标设备的响应数据包解析其资产信息。其中,端口探活需要首先确定被扫描的主机是否可达,然后扫描可达主机是否开启了指定的工控端口。对主机可达性的确认采用ping检测技术,通过构造特定的ICMP数据包,然后发送给目标主机,根据目标主机的响应判断是否存活。然而大多数的工控设备为了防止被扫描,通常会开启禁ping功能,将降低设备探活的准确性,从而影响资产探测的效率。此外,对可达主机端口的扫描最常采用的是全连接扫描和无状态扫描,但不管采用哪一种扫描方式都需要设置timeout参数,等待目标主机的响应。当进行大规模扫描时,等待时间将会成为提高扫描速度的瓶颈。
因此,该文旨在提高端口探活的准确性和速度,对端口探活过程中的主机存活扫描技术和端口扫描技术进行研究,提出一种基于组合扫描的异步无状态扫描方法,获取开放指定工控协议端口的设备,然后结合具体的工控协议构造请求数据包,从而收集设备的资产信息,为系统漏洞安全问题的发现提供依据。
1 相关研究
工控设备的资产信息是指可以标识设备的相关信息,包括设备的供应商、修订版本、产品代码等数据。目前,对工控设备进行资产探测的方法主要是基于传统互联网设备的探测技术。国外针对工控设备探测技术开展了一系列的研究,开发了很多功能强大的探测工具,其中使用较为广泛的是Flody公司发布的Nmap探测工具[7],并且很多其他探测工具都是由Nmap延伸开发出来的,比如Shodan[8]和Zmap[9]。Nmap是一种基于协议的网络探测工具,适用于快速扫描大型网络。除此之外,它还可以用来获取目标设备的操作系统类型、服务类型等。它的探测原理与ping检测技术类似,并且可以实现对多种协议的探测,但是由于很多工控设备通常会开启禁ping功能,所以使得Nmap对工控设备的探测准确率较低。
J.Matherly通过长期对工控设备探测技术的研究,在Nmap探测工具的基础上发布了Shodan网络空间探测引擎[8,10]。Shodan可以直接通过互联网查找物联网设备,然而由于Shodan对工控设备的扫描原理是基于Nmap的扫描方式,所以在探测性能方面并没有得到优化和提升,仍然面临着对工控设备探测准确率较低的问题。
为了进一步提升探测速度,密歇根大学在Nmap工具的基础上设计开发了Zmap设备扫描器,该扫描器主要功能是发现开放端口[9,11]。因为Zmap使用了无状态连接的扫描方式进行端口扫描,所以它的扫描速度比Nmap快了1 300倍,在1 GB带宽的网络环境下,扫描全部IPV4地址空间只需要45分钟。然而,由于其追求探测速度,等待与目标设备建立连接的时间很短,所以探测到的资产信息量比较少,使得其探测准确率较低。
国内在工控设备资产探测方面也取得了一些成果,文献[12]设计了一种工业控制系统扫描平台(ICSMap),该平台将Nmap和Zmap进行了结合,优化了探测的效率,并且支持扫描多种工控协议,但是探测的准确率并没有得到优化。文献[13-14]针对西门子工控设备提出了一种基于Profinet协议的扫描方法,该方法利用Profinet协议获取西门子工控设备的资产信息,但是该方法仅适用于对西门子厂商生产出来的工控设备进行探测,不支持其他工控协议。文献[15]提出了一种基于NSE脚本的工业互联网设备探测方法,可支持多种工控协议。但是该方法只是增加了支持的工控协议种类,并没有优化探测性能。文献[5,16]专门提出了一种针对工控设备的通用资产探测方法,可同时支持Modbus、S7、DNP3和BACnet四种工控协议,并且在端口探活阶段通过增加数据包的发送,以解决工控设备中的禁ping问题。然而由于对工控设备的探测通常集中在某个网段,涉及的设备数量比较多,如果端口探活阶段增加数据包的数量很有可能引起网络拥塞,另外等待目标设备响应而设置的timeout参数也会成为提升扫描速度的瓶颈。因此,基于上述研究,该文旨在提高工控设备资产探测的速度和准确性。
2 基于组合扫描的异步无状态工控设备资产探测方法
对传统互联网的探测往往是对一台或者几台设备进行一些常用端口或者全部端口的探测,目的是全面收集这些探测设备端口的开启和关闭情况、设备信息和安全漏洞等,通常情况,对一台设备的探测时间会比较久。与传统互联网不同,对工控设备的探测通常集中在某个网段,涉及的设备数量比较多,如果对大量没有开启的端口或者不运行的设备发送大量探测数据包,将会造成系统资源的不必要浪费,导致探测效率的降低。因此,该文首先对端口进行探活,初步发现探测的网段中有哪些设备正在运行。
端口探活技术包括主机扫描技术和端口扫描技术两种类型。主机扫描是收集探测信息的第一步,以确定扫描的目标主机是否可达。主机存活扫描利用的最基本手段是ping命令,通过ping命令来探测能否与目标主机建立通信连接。然而大多数的工控设备为了防止被扫描,通常会开启禁ping功能。此时就无法通过ping命令判断设备的状态,从而降低了探测的准确性。当通过主机扫描技术确认了目标主机的连接状态后,接下来就利用端口扫描技术对处于运行状态的设备进行端口开放情况的探测。传统的端口扫描方式主要是通过TCP三次握手去连接,而建立连接过程中存在的连接状态是由操作系统在底层实现存储的,需要消耗大量的系统资源,从而限制了端口扫描的速度,延长了探测周期。
为了解决工控设备因开启禁ping命令而引起探测准确性降低的问题,目前常用的方法是构造多个不同的数据包,在对目标主机进行探活时依次将多个报文发送给目标设备,只要能收到其中一个报文的回复,就说明目标设备是处于开启状态的[5,16]。这种方式虽然能避免禁ping和丢包造成的错误判断,但是主机探活过程将产生大量数据包,不仅浪费系统资源,而且容易引起网络拥塞。在端口扫描阶段,为了提高端口扫描速度和节约系统资源,产生了一种无状态的连接方式,无状态连接是指主机不需要关心TCP连接的状态。无状态连接的通信过程如图1所示。首先扫描主机向目标主机发送一个SYN数据包,然后等待目标主机回复SYN+ACK包,之后发送RST取消建立连接。因整个过程没有完成TCP的三次握手连接,所以不会占用操作系统的TCP/IP协议栈资源,也不需要操作系统对连接状态进行会话组包。这种方式可以极大地提高端口扫描的速度,但是,TCP SYN扫描很容易被对方的入侵检测系统或防火墙检测到,并且需要设置timeout参数等待目标主机的回复。
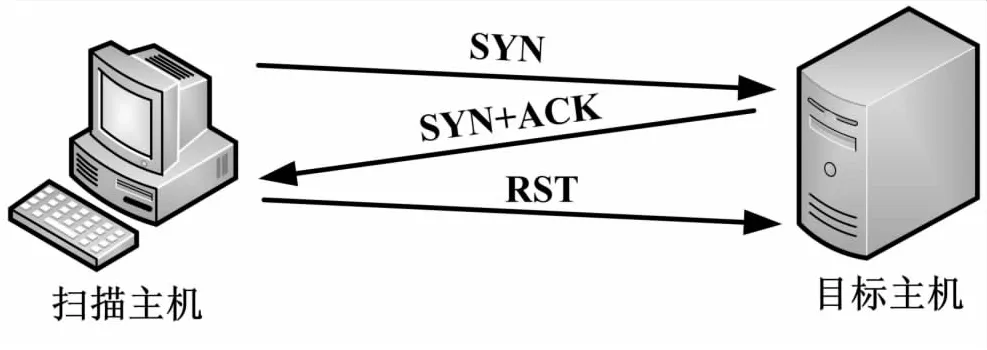
图1 无状态链接通信过程
因此,该文提出一种基于组合扫描的异步无状态端口扫描方法,通过建立发送数据包线程和接收数据包线程,来消除等待目标服务端回复的时间,以进一步提升扫描速度,并且发送数据包线程采用组合扫描的方式,同时实现对主机存活状态和端口开关状态的判断。组合扫描的过程如图2所示。
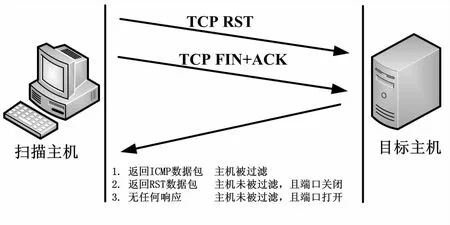
图2 组合扫描过程
组合扫描是同时发送TCP RST数据包和TCP FIN+ACK数据包到目标主机。根据RFC 793协议规定,当主机收到TCP RST数据包时,尽管TCP堆栈不会响应这个类型的数据包,但如果无法访问目标计算机,路由器将发送ICMP数据包。因此,如果没有返回ICMP数据包,则表示目标存在;否则,目标不存在。这个操作可以用来判断目标主机是否被过滤,能更多地获取工控设备的存活信息,避免因为禁ping问题而做出错误判断,大大提高端口探测的准确率。当向目标主机发送TCP FIN+ACK数据包时,若未收到响应,则表示目标端口打开或者目标主机被过滤;若收到RST数据包,则表示目标端口关闭。这个操作可以有效降低被对方的防火墙或入侵检测系统监测到的概率,因为该方法没有完成完整的连接操作,所以对方不会认为是一种扫描或攻击,而只会认为是一次网络错误的发生,从而不会被记录下来。
扫描过程启动后,扫描主机会对网卡建立一对异步处理线程,分别是发送数据包线程和接收数据包线程[17]。发送数据包线程将构造好的组合扫描数据包发送给目标主机,如果目标主机返回响应数据包,响应数据包由接收数据包线程接收,并解析收到的数据包。整个过程中,发送数据包线程只负责发送构造好的探测数据包,接收数据包线程只负责接收目标主机的响应数据包,两者之间没有交互,从而消除了传统无状态连接的回复等待时间,具体工作流程如图3所示。

图3 基于组合扫描的异步无状态端口扫描工作流程
为了更好地实现异步操作,在启动发送数据包线程和接收数据包线程后,将发送数据包线程分配到偶数编号的CPU,接收数据包线程分配到奇数编号的CPU。发送和接收数据包线程的具体执行流程如下:发送线程首先创建一个指向外部变量的指针,用于通知线程内发送数据包的数量以及当前的发送速度等信息,然后发送数据包线程初始化被扫描网段的IP和端口,设置数据包的初始发送速度,接着根据被扫描网段的IP数和每个IP端口数的乘积来确定需要执行的扫描数量,最后循环发送组合扫描数据包,直到完成指定扫描数量,进入下一网段的扫描。接收线程同样首先创建一个指向外部变量的指针,用于通知线程内接收数据包的数量以及当前的接收速度等信息,然后创建接收表记录响应数据包的信息,并根据响应数据包输出端口开放情况。
以Modbus工控协议[18]为例,它是一种基于以太网TCP/IP的应用层通信传输协议,广泛应用在分散控制方面。运行Modbus协议的设备资产探测通信流程如图4所示。Modbus协议常用的端口号是502,通过上述端口探活流程,获取开启了502端口的工控设备,然后扫描主机向目标工控设备的目标端口发起TCP三次握手连接。通信连接建立后,扫描主机首先构造Modbus通信请求数据包,构造的Modbus通信请求数据包如表1所示。Modbus数据包中的字段是由十六进制编码构成的,前两个字节00 00为此次通信事务处理标识符,通常每次通信之后会加1以区别不同的通信数据报文。接下来的两个字节00 00表示Modbus的协议标识符,00 06为数据长度,单位是字节,这里表示的是请求6个字节的数据信息。09是设备地址,即这台设备中包含资产信息的寄存器编号,以上7个字节称为Modbus的报文头。03为功能码,表示读取保持寄存器。00 00为起始地址;00 01为读取的寄存器数,即从00 00开始读取6个字节,并且只读1个资产信息寄存器。然后将此数据包发送给目标设备,之后目标设备返回6个字节数据的资产信息,通常包含有工控设备供应商、产品型号、版本号等[19]。

表1 构造的Modbus通信请求数据包

图4 Modbus工控设备资产探测通信流程
3 性能测试
为了验证提出的资产探测方法在探测准确度和探测时间上的优势,选取传统资产探测工具Nmap和文献[16]提出的资产探测方法作为对比进行实验验证。探测准确度和探测时间的定义如下:
探测准确度:在端口探活阶段,单位时间内探测到的开放指定端口的IP数量。IP数量越多,说明探活的准确度越高,能够获得资产信息的设备数越多。
探测时间:在指定网段内完成完整资产探测所需的时间,包括端口探活时间和获取设备资产信息的时间,探测时间越短,说明探测速度越快。
端口探活阶段是扫描主机与目标工控设备建立初步通信的阶段,这个阶段的准确性将对后面探测具体资产信息的工作产生直接影响。为了保证探测准确度不受网络环境的影响,实验选定的探测范围为同一IP范围段,并且是三台主机在同一时间段内并行运行不同资产探测方法。此外,用Python编写脚本以实时记录探活数量和探活时间,统计一段时间内探活到的开放指定端口的IP数量。实验如无特殊说明,均以Modbus的502端口为探测的目标端口,这是因为Modbus协议在工控设备中的应用较多,能够进行探测的IP范围较为广泛,测试结果如图5所示。

图5 Modbus端口探活结果
由图5可以看出,提出的基于组合扫描的异步无状态端口扫描方法在单位时间上探测到的IP数量明显增多,这说明在同一IP范围段,提出的方法能够获取更多设备的资产信息。从具体数据上来看,在实验呈现的时间段内,所提方法的探测准确度与Nmap相比提高了2倍左右。这是因为采用的组合扫描方式可以有效降低被对方防火墙或入侵检测系统监测到的概率,并避免了因工控设备开启禁ping导致主机探活失败的问题。虽然文献[16]在探活阶段通过向目标设备依次发送5个探测报文来应对工控设备禁ping的问题,但是探活过程产生的大量数据包将增加网络的传输和处理时延,使得其在单位时间内探活到的IP数量少于所提方法。
接下来对资产探测时间进行对比分析,统计采用所提方法、文献[16]方法和Nmap探测工具完成指定网段内完整资产探测所需的时间,并进行多次重复探测,分别记录每次探测的时间,然后计算平均值,图6所示柱状图记录了每次完成探测的时间及其平均值。由图可以看出,所提方法完成完整资产探测所花费的时间最短。这是因为所提方法在端口探活阶段对探活数据包的处理采用异步方式,消除了全连接扫描和传统无状态连接扫描的连接建立时间和回复等待时间,提升了端口探活的效率。从具体数据上来看,所提方法与传统探测工具Nmap相比,在探测时间上缩短了约50%;与文献[16]提出的方法相比,探测时间缩短了约20%。通过对上述两组实验结果的分析,所提方法与文献[16]和传统资产探测工具Nmap相比,可以有效提升资产探测的速度和准确性。
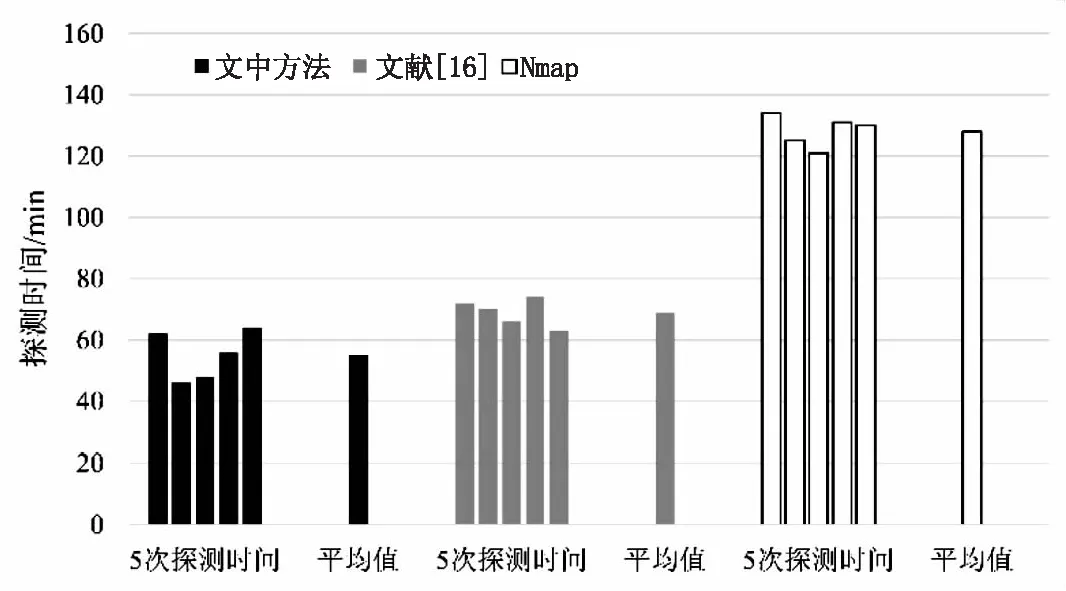
图6 探测时间对比结果
4 结束语
为了提升工控设备资产探测的速度和准确性,提出了一种基于组合扫描的异步无状态工控设备资产探测方法。该方法主要对资产探测过程中的端口探活过程进行改进,通过异步处理方式提升端口探活的效率,以缩短资产探测时间,并采用组合扫描降低被对方入侵检测系统监测到的概率,确保端口探测的准确率。最后的测试实验结果证明了该方法的有效性。
猜你喜欢
网络安全和信息化(2018年4期)2018-11-09 12:01:54
中国设备工程(2017年8期)2017-05-10 07:49:17
中国设备工程(2017年7期)2017-04-10 08:08:54
环球市场(2017年36期)2017-03-09 15:48:21
信息安全与通信保密(2016年3期)2016-08-23 01:23:38
自动化学报(2016年5期)2016-04-16 03:38:47
中国新通信(2014年11期)2014-09-11 19:27:52
深圳信息职业技术学院学报(2013年3期)2013-08-22 11:42:30
吉林建筑大学学报(2012年3期)2012-08-15 00:54:52
电子设计工程(2011年24期)2011-06-09 10:15:02