农业无人车线控制动试验平台的开发*
2023-07-21 10:36:54卢志航
南方农机 2023年15期
俞 康 ,卢志航
(重庆三峡学院,重庆 404020)
随着农业现代化进程的加快,传统的农业劳动方式面临诸多问题,其中,劳动力短缺是最为突出的问题之一。农业无人车作为一种新型的农业机械化装备,通过实现无人驾驶和自主作业等功能,不仅能够有效缓解农业劳动力短缺的问题,还能够提高农业生产的效率和质量,实现农业生产的智能化和现代化。而线控制动系统是农业无人车中的基础系统之一,它通过控制车辆的速度和制动,保障了车辆的安全性和稳定性[1]。然而,试验是线控制动系统研究过程中必不可少的一项工作,为了验证线控制动系统的可靠性和有效性,必须进行大量的试验。为了解决试验成本高、效率低、数据采集困难等问题,课题组研制了一款农业无人车线控制动试验平台,通过将实车与试验平台结合起来,可以更加真实地获取制动参数,提高了试验效率,从而为农业无人车的实际应用提供技术支持。本文主要介绍了该平台的组成和制动试验过程,并通过空载和负载情况下的试验,验证了平台的可靠性和有效性。该研究成果不仅对于农业无人车的研发具有重要意义,也为其他领域的无人车研究提供了借鉴价值。
1 试验平台的结构参数
农业无人车线控制动试验平台由车体骨架、动力驱动系统、电控转向系统、线控制动系统、电池组成[2]。作为一种新型农业装备,农业无人车具有自主导航和无人操作等特点,可以有效解决农业劳动力短缺的问题,并提高生产效率[3]。在农业无人车的设计和制造过程中,车体骨架作为主体结构起到承重和固定组件的作用,因此必须具备足够的强度和稳定性。动力驱动系统是农业无人车的核心组成部分,用于提供动力以实现车辆的行驶,农业无人车的动力驱动系统采用单个驱动电机和齿轮传动。电控转向系统是农业无人车的另一个重要组成部分,用于控制车辆的转向,通常由步进电机、蜗轮蜗杆减速器、转向器和相应的传感器组成。本研究的电控转向系统由步进电机和蜗轮蜗杆减速器组成,具有精度高、响应快、可靠性高等优点[4-6]。线控制动系统采用制动器和直线电机驱动单元相结合的方式,可以实现精准控制,有效保障了车辆的行驶安全[7]。
在设计无人车的结构参数时,需要根据实际需求和使用环境来进行选择和优化,需要考虑无人车的悬挂系统、驱动系统、能源系统等方面的设计。其中,悬挂系统需要能够适应不同地形条件,保证车身稳定;驱动系统需要能够提供足够的动力,使无人车能够顺利完成任务;能源系统需要选用高效、可靠的能源,确保无人车能够持续运行。农业无人车线控制动试验平台的结构性能参数如表1 所示。
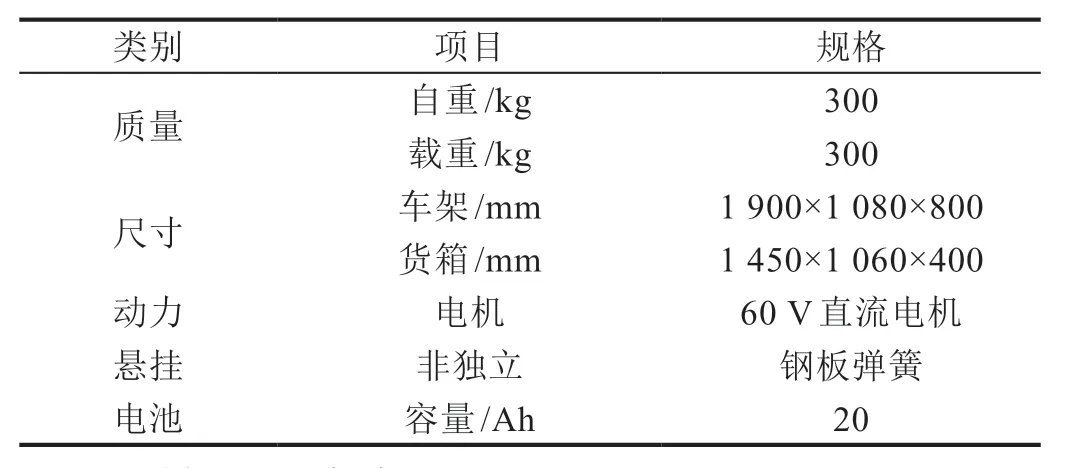
表1 农业无人车线控制动试验平台结构性能参数
2 线控制动试验
制动系统是车辆安全的重要保障,它不仅能够帮助驾驶员在紧急情况下迅速减速或停车,避免与其他车辆或障碍物碰撞,还能在车辆行驶过程中进行稳定控制,提高车辆的稳定性和操控性。
农业无人车中附着路面制动试验,主要是为了测试和评估农业无人车的制动性能和安全性,以确保无人车在行驶过程中能够准确、迅速地停车,保障农业生产和工作的安全,具体的试验过程和指标如下[8-9]。
1)车速选择:根据无人车的最高速度和实际行驶情况,选择适当的测试速度。
2)制动距离测试:在制动开始的瞬间记录无人车的速度,然后观察和记录无人车在刹车过程中的停止距离。
3)制动力测试:测试无人车在制动时产生的制动力大小,以评估制动系统的性能及其能否满足制动要求。
4)制动稳定性测试:测试无人车在制动时的稳定性和平稳性,以评估制动系统的可靠性和稳定性。
农业无人车中附着路面制动试验,选取在中等附着力的水泥路面进行。首先,测试地点应平坦、宽阔、无障碍物、无路面杂物,并且有足够的制动距离。其次,需要准备测试设备,包括计时器、车速表、软尺、一台接收各项数据的笔记本电脑等。这些设备需要在测试之前进行校准和检查,以确保测试数据的准确性。
3 试验参数
进行农业无人车制动试验时,特别需要注意试验的安全,无人车制动试验通常需要在平坦的场地上进行,需要确保场地的安全性和无干扰。在测试过程中,需要按照相关的安全规定和操作程序进行,确保测试设备和测试环境的安全。同时,还需要注意测试车辆的安全,防止车辆在制动时出现危险情况,在进行农业无人车制动试验时,需要认真制定测试计划,确保测试的准确性和可靠性,并遵守相关的规定和标准,确保测试的安全性和有效性[10]。
对于农业无人车制动试验,需要采集一些数据,以便分析和评估基于直线电机的线控制动器在农业无人车辆上的性能与可靠性,以下是需要采集的一些数据。
1)制动距离:记录车辆在制动时行驶的距离,通常使用激光测距仪或GPS测量仪器进行测量。
2)制动时间:记录农业无人车从发出制动信号到车辆停止的时间。
3)制动力:记录车辆在制动时的制动力大小,可以使用直线电机推力的数据进行计算,从而间接得出。
4)电机响应时间:记录从发出制动信号到车辆开始减速的时间间隔,使用数据接收上位机采集的制动信号并与直线电机工作的数据差进行计算。
通过分析这些数据,可以评估基于直线电机的无人车线控制动器的性能是否达到预期,以便进一步优化设计,农业无人车线控制动试验测量数据如表2所示。

表2 农业无人车线控制动试验测量数据
4 试验数据的采集
农业无人车的线控制动试验平台是一个非常重要的工具,可以用于对无人车的制动系统进行性能测试和优化。试验平台主要是通过采集无人车在制动过程中的相关数据,如车速、制动距离和制动时间等参数,来评估无人车的制动系统性能,进而对其进行优化[11]。因此,试验数据的采集是非常关键的工作。
在试验过程中,首先需要在上位机或者遥控器上设置试验条件,例如车速、负载情况和制动力等。设置好试验条件后,无人车就可以进行制动试验。在试验过程中,可以使用传感器对车速进行实时监测,通过信号采集卡将数据传输到上位机中进行处理,得到车速参数。车速是制动试验中最重要的参数之一,它可以用来评估无人车的制动性能。在试验过程中,需要对车速进行实时监测,以便得到准确的车速参数。常用的车速测量方法有轮速传感器和GPS等。
4.1 农业无人车空载制动试验结果分析
通过对不同车速下的制动距离、制动时间和电机响应时间进行测试和分析,农业无人车空载试验结果如表3所示,得出如下结论:
1)从试验数据可以看出,随着车速的增加,制动距离和制动时间也呈现出增加的趋势,这是因为随着车速的增加,车辆具有更高的动能,需要更长的距离和时间来停止车辆。此外,通过对比不同试验序号的数据,可以看出制动距离和制动时间的增加并不是线性关系,这表明在高速行驶的情况下,制动距离和制动时间的增加速度可能更快,需要更快的响应时间来实现更短的制动距离和制动时间。
2)电机响应时间也对制动性能有一定的影响。其他条件不变,电机响应时间较短时,制动距离和制动时间也会相应地减小,这是因为电机响应时间较短时,直驱线控制动系统能够更快地响应制动指令,从而更快地减速和停止车辆。
综上所述,通过直驱线控制动试验结果可以得出结论:该系统能够提供足够的制动能力,在不同车速下具有较好的制动性能表现,并且电机响应时间对制动性能有一定的影响。在未来的农业无人车设计中,应该充分考虑直驱线控制动系统的性能表现,以便实现更好的驾驶控制和行驶安全。
4.2 农业无人车负载制动试验结果分析
对农业无人车的负载制动性能进行了试验研究,通过整理试验数据,负载制动试验结果如表4 所示,得出以下结论:
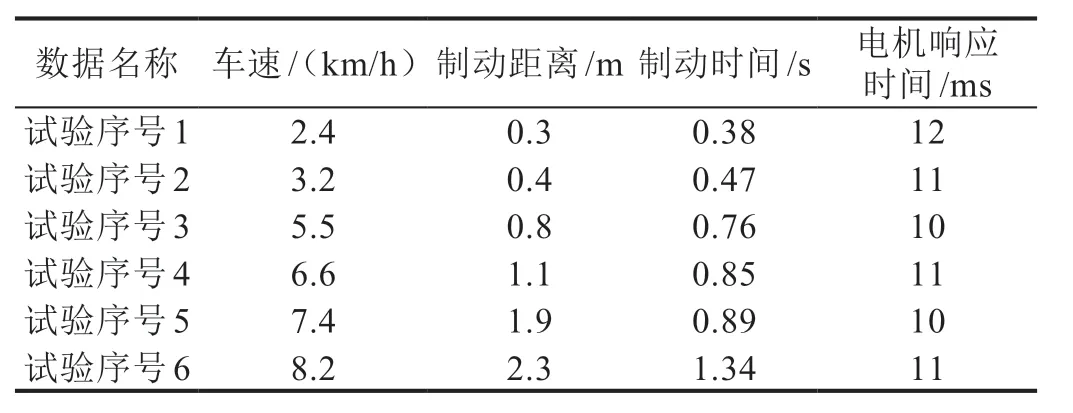
表4 农业无人车负载试验结果
1)从试验数据可以看出,随着车速的增加,制动距离和制动时间呈现出增加的趋势。这是因为车辆在行驶中积累了更多的动能,需要更长的距离和时间来停止。
2)与前文的空载线控制动试验结果相比,负载情况下的试验结果显示,制动距离和制动时间有所增加,这是因为负载增加了车辆的质量,需要更多的能量来减速和停车。但是,直驱线控制动系统仍然能够提供足够的制动能力,具有较好的制动性能表现。
3)值得注意的是,电机响应时间对制动性能的影响仍然存在。与无负载情况下的试验结果相似,电机响应时间较短时,制动距离和制动时间也相应地减小。
综上所述,负载试验结果表明,直驱线控制动系统在不同负载情况下具有较好的制动性能表现,但负载的增加会影响制动距离和制动时间。在农业无人车的设计中,应该充分考虑负载的影响,以便实现更好的驾驶控制和行驶安全。同时,电机响应时间的优化也是提高直驱线控制动系统性能的重要因素。
5 结论
农业无人车线控制动试验平台的开发研究具有重要意义,该平台的建立有助于提高我国农业装备的技术水平和竞争力。通过对试验数据进行分析,可以看出线控制动系统在不同条件下的制动性能表现良好,但需要进一步优化以提高制动效率。未来的农业无人车设计应充分考虑试验数据和平台研发成果,以推动我国农业现代化的进程。下一步,应进一步完善试验平台的功能和性能,提高测试的准确性和可靠性。
猜你喜欢
铁道通信信号(2020年11期)2020-02-07 01:02:20
汽车与新动力(2019年5期)2019-11-07 05:20:16
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
汽车维护与修理(2018年1期)2018-04-04 01:13:22
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
电子器件(2015年5期)2015-12-29 08:43:38
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33