
蝠鲼集群滑翔水动力性能研究
2023-07-19 08:36:50高鹏骋黄桥高宋东潘光马云龙
西北工业大学学报 2023年3期
高鹏骋, 黄桥高, 宋东, 潘光, 马云龙
(1.西北工业大学 航海学院, 陕西 西安 710072; 2.西北工业大学 无人水下运载技术重点实验室, 陕西 西安 710072)
长时间的自然进化赋予了鱼类非凡的运动和生存能力:低能耗长距离巡游、大推力高效率推进、强大的爆发力和机动性能、敏感的感知和定位能力、优异的自我保护和精确攻击能力。蝠鲼属鳐科生物,其胸鳍具有较大的展弦比,较大的展弦比在能满足大升阻比需求的同时还具备负载空间大的特点[1],并且蝠鲼巡游速度适合水下航行器长距离航行,因此其生物形态学特征非常适合作为仿生航行器的仿生对象。同时,蝠鲼采用柔性胸鳍扑动与滑翔相结合的推进方式[2],具有高机动、高适应性、高效节能等优点,是优良的水下仿生机器人集群借鉴对象。
集群游动是鱼类常见的生物行为。鱼群为个体提供了许多好处,包括规避天敌、提高捕食成功率,以及提供更多繁殖机会。集群游动中也蕴含着众多的流体力学问题,一个关键问题是水动力学在集群游动中的作用。一方面,人们关注流动对集群游动模态发生的影响。著名流体力学家Lighthill[3]曾猜测“鱼群的有序排列方式可能完全因被动的流体力学相互作用而自发产生,而不需要精确的控制机制”。这一猜想后来被称为“Lighthill猜想”,但在其被提出后的几十年间从未被完全证实。另一方面,人们关注生物在集群游动中的水动力学收益问题。长期以来,人们认为集群游动中的个体能够利用特定队形保存能量,获得水动力收益,提高自身运动性能[4-5]。
近年来,随着计算机技术、流体计算方法以及流体仿真技术的发展,学者们数值模拟了鱼类两体串、并联、多体钻石型排布等多种排布方式下的水动力特性。Chao等[6]对两行波翼型周围的流体动力学进行了数值研究,以了解鱼群的水动力机制。系统地讨论了两翼片串联、平行和交错布置时的推力产生和尾迹结构。Maertens等[7]对双鱼编队游动进行了数值模拟,研究表面领航鱼仅在距离较近时获得能耗增益,跟随鱼在充分利用尾涡的前提下可在任何能与领航鱼尾迹相互作用的位置受益。Li等[8]数值模拟了4种不同编队(即串联、并联、菱形和矩形)仿真鱼集群游动,结果表明鱼集群游动有益于推进效率的提高,尾流和横向压力共同影响游动效率,推力主要受到尾流影响,功率损失主要由横向压力引起。
由于实验测量的困难,目前大多数集群水动力实验对象采用的是降阶模型(如NACA翼型)或尾鳍摆动模式的仿生样机,并且集群数量大多在2~3个,编队设置大多采用串联、并联。Dewey等[9]和Boschitsch等[10]分别实验研究了2个并联和串联的拍动翼形在均匀来流中的推进特性,实验系统考察了翼形拍动相位差和分离距离对其水动力性能的影响。裴正凯等[11]实验研究了2条仿鲹科机器鱼在并排运动时的水动力性能,结果显示在特定相位差下,并排游动的机器鱼可以相互促进,提高运动效率。
以上的数值研究和实验表明,特定编队的集群运动可以显著提高鱼群的游动效率。尽管如此,相关研究仍有待进一步开展。当前国内外关于集群水动力特性的研究主要集中在二维翼型而非真实的三维生物或航行器,并且集群中单体数目及编队设置也较少。与此同时,国内外关于生物在集群滑翔状态下的减阻表现鲜有研究。
本文开展了双体、三体、四体及六体蝠鲼集群滑翔水动力性能的数值研究,具体来说,队形包含串联、三角排布、钻石排布,对集群中各个单体阻力、升力、系统平均阻力以及压力分布情况展开研究,以期得到最优的航行器滑翔队形,为航行器集群滑翔编队设置提供参考。
1 数值计算方法
1.1 问题描述
数值计算模型根据实际生物观测得到[12],如图1所示。其特征尺寸分别为:展长(LS)2 900 mm,体长(LB)1 800 mm,最大体厚(LT)350 mm。
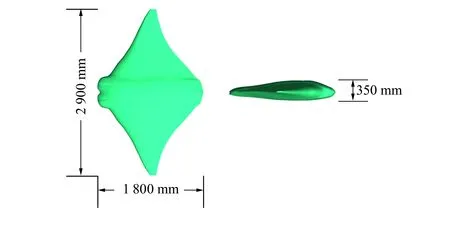
图1 数值计算模型
计算域设置为矩形计算域,其尺寸根据布放航行器数量做适应性调整,如图2所示。保证入口与第一个单体间距4倍体长,出口与最后一个单体间距7倍体长,展向壁面距对称面2倍展长,垂直方向保证10倍最大体厚(即是说水深条件为3.5 m)。

图2 计算域设置
根据文献[13],蝠鲼集群滑翔状态下的系统平均阻力(Dsystem)按照(1)式计算
(1)
式中:n为集群中单体数目;i为集群中各个单体编号。
将蝠鲼集群滑翔过程中的受力无量纲化
(2)
(3)
式中:D,L为蝠鲼所受的阻力、升力;ρ为流体密度;U为来流速度;LB为蝠鲼体长。
1.2 计算方法
首先使用ANSYS ICEM对计算域进行结构网格的划分,随后借助 FLUENT 软件进行计算,采用有限体积法离散Navier-Stocks方程,采用二阶迎风格式进行动量离散,采用 SIMPLEC 算法对连续方程中的压力和速度进行耦合,湍流模型采用SSTk-ω模型,收敛残差设置为1×10-5。
边界条件设置为:入口边界为速度入口(来流速度取为0.5 m/s),出口边界为压力出口,壁面设为自由滑移壁面,航行器表面均为静止无滑移壁面。
2 收敛性与数值验证
2.1 收敛性验证
为进行网格无关性验证,分别选取了网格数量为1.5×106,3×106,4.5×106,6×106的4套网格对蝠鲼单体在0°攻角下以0.5 m/s速度滑翔进行仿真计算,具体的升力(L)、阻力(D)见图3所示。由图3可知:4种网格尺度下推力及升力变化无明显差异,表明数值计算是网格收敛的,后续计算采用4.5×106这一套网格的节点布置。

图3 网格收敛性验证
2.2 数值计算方法验证
为了验证计算方法的有效性,计算了三维渐变NACA0009水翼在雷诺数(Re)为1.0×106时不同攻角下的水动力性能,并以Zarruk等[14]的水翼水洞实验数据为例进行数值方法验证。
图4所示为不同攻角下,阻力系数(CD)、升力系数(CL)对比,由图4可知:数值计算方法所得到的CD,CL与实验值相吻合,验证了本文所采用的数值计算方法的可靠性。

图4 不同攻角下的CD,CL对比
3 数值计算结果与分析
将蝠鲼集群滑翔编队划分为串联排布、三角排布及钻石排布,设置均匀来流速度为0.5 m/s,计算蝠鲼在不同滑翔编队下的流体动力特性,并与单体滑翔进行对比,分析集群队形对减阻性能影响,其中单体阻力系数为6.93×10-3,升力系数为5.02×10-2。
3.1 串联排布
本节对双体、三体、四体和六体蝠鲼集群滑翔进行了数值模拟,集群中各单体间距保持0.25LB。图5展示了集群中各个单体的阻力表现情况,水平面内2个坐标轴分别表示集群内单体数目及单体序号(从前往后依次为1,2,3…),z轴表示阻力系数。由图5可以看出,随着集群中单体数目的增加,处于领航位置的蝠鲼所受阻力逐步减小,队尾蝠鲼所受阻力有增大趋势。在每种排列方式中,领航蝠鲼受到的阻力最小,队尾蝠鲼受到的阻力最大,位于队伍中部的各单体阻力相差无几。

图5 串联队形下各单体阻力系数
图6展示了六体串联时的压力分布情况,可看出位于集群最前端的蝠鲼1头部的高压区较小,而其尾部高压区较大,因此能起到良好的减阻效果;中间4个蝠鲼单体所处的压力环境相似,这与图5得到的阻力分布吻合;位于最末端的蝠鲼6头部存在巨大高压区,而其尾部高压区较小,因此它在编队中承受了最大的阻力。
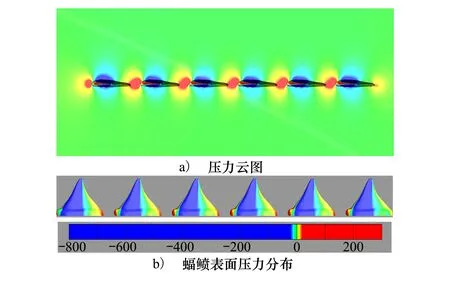
图6 串联队形下压力云图
3.2 三角排布
本节对蝠鲼在三角排布下集群滑翔进行了数值模拟,三角队形分为2类:两蝠鲼领航一蝠鲼伴游(前二后一)以及一蝠鲼领航两蝠鲼伴游(前一后二)。图7展示了2种三角队形的具体排列方式以及集群中各单体的阻力系数(红色数字)及升力系数(蓝色数字)。从图7a)可以看出,当集群队形采用前二后一分布时,相较于单体滑翔,集群中各个单体受到的阻力均有减小,各单体升力均有提升。从图7b)可以看出,当采用前一后二分布时,仅在领航蝠鲼出现了减阻效果,但升力均有提升。
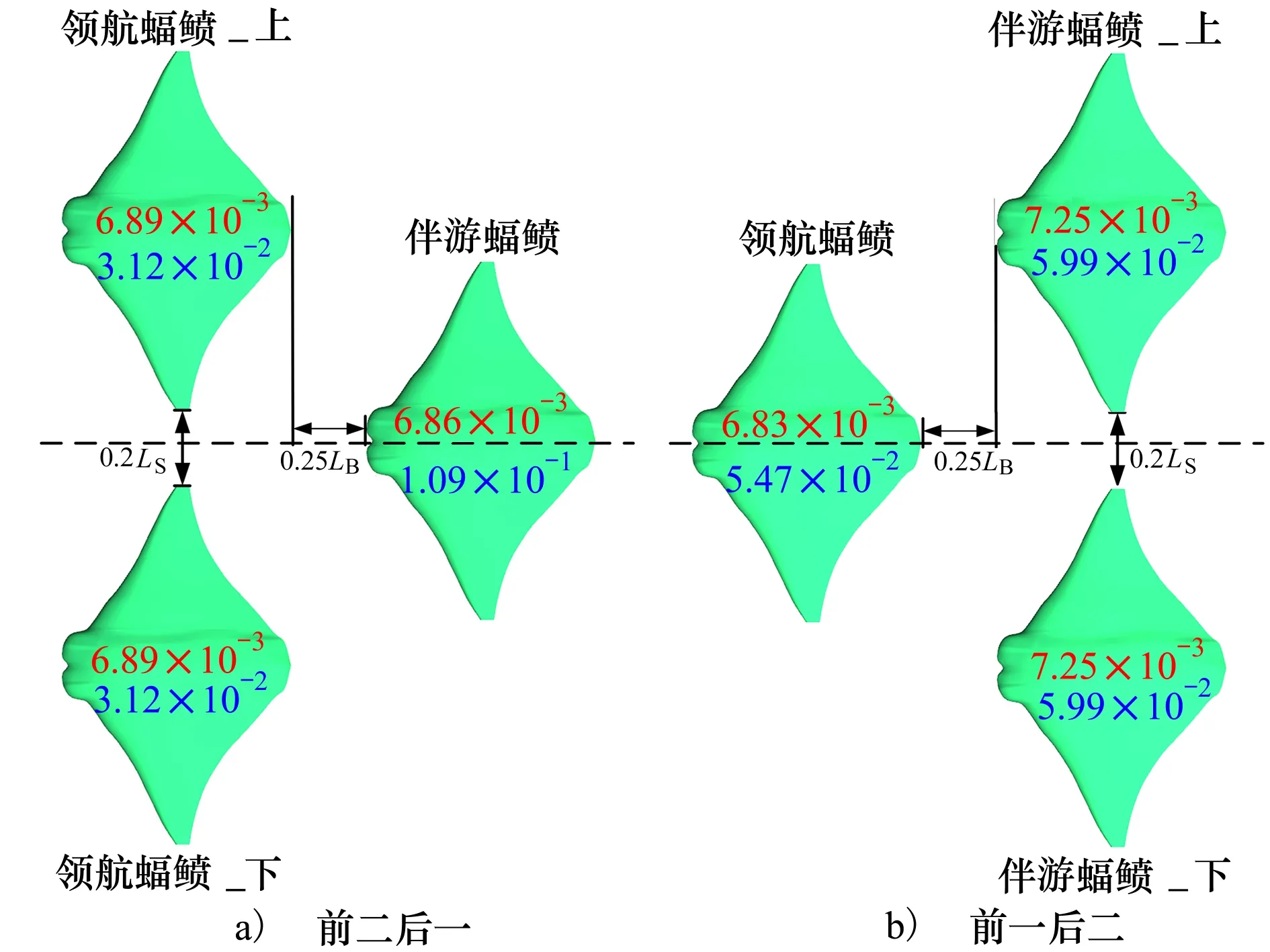
图7 三角队形下各单体阻力系数
图8展示了三角队形下流场压力分布情况,从图8a)可以看出伴游蝠鲼的存在使得领航蝠鲼-上的下半翼以及领航蝠鲼-下的上半翼附近出现了高压区,这有利于减小领航蝠鲼的阻力;同时在伴游蝠鲼头部前方(见图8a)标注)形成了一个低压区,会产生一个向前的吸力,从而减小伴游蝠鲼所受阻力。从图8b)可以看出领航蝠鲼上下半翼及尾部高压区面积巨大, 这必然导致领航蝠鲼所受阻力进一步减小,但这并不利于伴游蝠鲼减阻,并且可以从图中发现编队中心所形成的低压区并不会产生一个向前的吸力,因此伴游蝠鲼所受阻力增加。
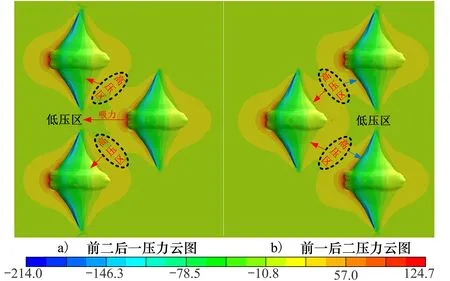
图8 三角队形下压力云图
3.3 钻石排布
本节开展了蝠鲼在四体钻石和六体钻石2种队形下的集群滑翔数值模拟。图9展示了2种队形的具体排列方式以及集群中各单体的阻力系数(红色数字)及升力系数(蓝色数字)。从图9a)可以看出,当集群队形采用四体钻石排布时,相较于单体滑翔,集群中前2排单体受到的阻力有所减小,升力提升,而队尾蝠鲼受到阻力增加,升力减小。从图9b)可以看出,各单体阻力及升力与四体钻石型分布大致相同,领航蝠鲼阻力进一步降低。

图9 钻石队形下各单体阻力系数
图10展示了钻石队形下流场压力分布情况,从图10a)可以看出由于流场中高压区的存在,前2排蝠鲼(即领航和中部蝠鲼)所受阻力都减小;虽然编队中心位置存在低压区,但在低压区前后均存在高压区,因此处于四体钻石队形的伴游蝠鲼无法同前二后一队形中的伴游蝠鲼一样从低压区获取减阻收益,但它同时还承受着前方高压区的增阻效果,因此其所受阻力增加。六体钻石队形的流场压力分布情况与四体钻石分布相似,因此阻力分布情况也基本相同。领航蝠鲼减阻效果下降的原因在于六体钻石分布时,领航蝠鲼头部高压区增加,尾部高压区与四体钻石分布无明显差别。
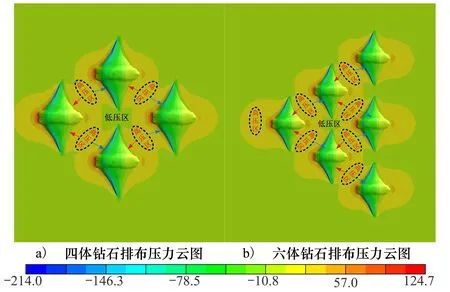
图10 钻石队形下压力云图
3.4 系统平均阻力分析
根据(1)式将所有队形的平均阻力进行汇总如图11所示,其中柱状图显示了各队形下平均阻力的实际大小,折线图显示了不同队形下平均阻力相对于单体阻力的减(增)阻百分比。从图中看出仅在前二后一、四体钻石、六体串联及六体钻石排布时,系统平均阻力降低。最减阻的排布方式为六体串联,减阻效果达到2.73%。
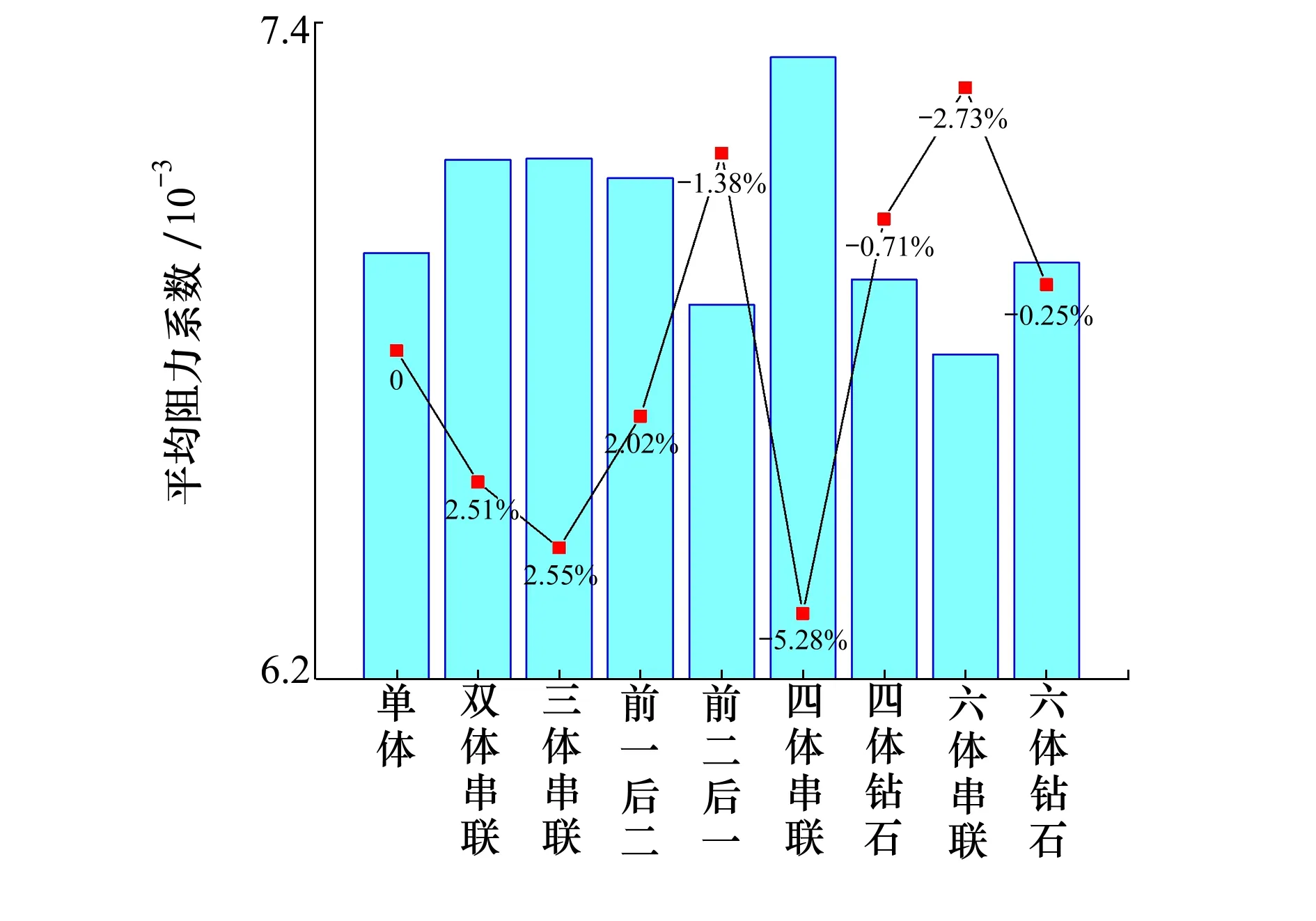
图11 平均阻力汇总
4 结 论
本文开展了多个蝠鲼在串联、三角、钻石排布下进行滑翔运动时的阻力、升力及流场压力分布研究,以期为仿生航行器集群滑翔队形提供指导意见,具体结论如下:
1) 力学结果表明领航蝠鲼总是获得最大的减阻收益,位于队尾的蝠鲼在大多数情况下承受最大的阻力,集群中各单体升力在大多数情况下均有所提高。
2) 集群减阻效果主要来源于各单体间形成的高压区及低压区,高压区有利于位于队伍前方的单体减阻,低压区在特定情况下会产生向前吸力利于位于队伍后方的单体减阻。
3) 集群滑翔队形不仅影响集群中各单体的阻力情况还会对系统的平均阻力产生影响,在本研究中发现有益于减小系统阻力的集群队形为前二后一、四体钻石、六体串联及六体钻石排布。
猜你喜欢
学苑创造·A版(2024年5期)2024-06-10 21:55:57
心声歌刊(2021年5期)2021-12-21 06:33:22
军民两用技术与产品(2021年7期)2021-10-13 08:12:20
草原歌声(2020年3期)2021-01-18 06:52:02
科学导报·学术(2020年26期)2020-10-21 11:18:54
能源(2019年9期)2019-12-06 09:33:04
作文大王·低年级(2019年6期)2019-08-01 01:44:02
能源(2019年12期)2019-02-11 07:11:46
小学时代(2017年16期)2017-06-19 19:33:19
西北工业大学学报(2015年1期)2016-01-19 03:29:50
