
基于PID 的卫星发射主动段遥测接收系统
2023-07-17 03:12:58张鑫鑫袁金如孙立达沈亦纯
上海航天 2023年3期
王 冲,张鑫鑫,周 捷,袁金如,孙立达,沈亦纯
(上海卫星工程研究所,上海 201109)
0 引言
近年来,随着卫星研制技术的飞速发展,以及国家战略部署的需要,卫星发射任务越来越密集。卫星测控技术是卫星发射任务圆满成功的重要保障,是一项关键技术[1-8]。现有的卫星发射测控方式,是通过多个地面测控站和远望测控船接力的形式来接收卫星遥测信息,实现卫星发射测控弧段的覆盖。对于一般太阳同步轨道卫星,卫星发射入轨阶段已经超出国内地面测控站覆盖范围;而测量船布设和准备时间较长,且保障成本较高[9-11]。
对于卫星发射主动段测控问题,地面测控站无法实现卫星发射主动段弧段的完全覆盖,即从运载火箭点火发射到卫星进入第一个地面测控站期间,存在卫星发射主动段测控盲区。虽然,这段测控盲区的时间不长,若卫星在发射期间出现异常,每一帧遥测数据对于现象分析和问题定位来说都是至关重要的[12-18]。目前已有一些学者在研究卫星发射测控方法。陈天运等[19]提出一种移动便携测控站,其便携性和环境适应性较好,但便携测控站含有WiFi 收发器,不符合卫星发射阵地要求;冯燕等[20]提出一种主动段测控多站联合自动联调方法,但该方法所述的测控站无法覆盖卫星起飞至第一测控站之间的弧段,无法解决卫星发射主动段测控盲区的问题;华清等[9,21]提出一种卫星入轨段的测控方法及系统,该方法通过建立运载火箭末级与用户星之间的上、下行双通信链路,实现中继卫星系统对用户星入轨段的遥测和遥控,但该方法适用于卫星发射入轨段测控问题,无法解决卫星发射主动段测控盲区问题。
因此,为解决卫星发射主动段测控盲区问题,本文研究卫星发射主动段遥测数据接收方法,提出了一种基于PID 的卫星发射主动段遥测数据接收系统,有效解决卫星发射主动段存在测控盲区的问题。在大气环境监测卫星发射任务中,设计的卫星发射主动段遥测接收系统得到了试验验证,实现卫星发射主动段遥测数据全时段实时接收与监测,保障卫星从地面电测试到发射入轨期间遥测数据的连续性和完整性,具有一定的工程意义。
1 卫星测试系统与发射场通信建立
卫星测试系统与发射场的通信贯穿于卫星发射场测试全流程。建立卫星测试系统与发射场之间的通信并保障其通信安全,是卫星发射场工作正常开展的前提。卫星测试系统与发射场之间的通信建立方式遵照《卫星测试系统与发射场通信协议》标准执行。
卫星测试系统与发射场通信内容如图1 所示,包含遥测原码、遥测物理量、遥控指令、测试设备控制指令、指令执行结果、测试设备状态参数原码、测试设备状态参数物理量等。卫星测试系统与发射场之间优先选用TCP 通信,当需要批量转发测试数据时选用UDP 通信。卫星测试时,多个工位和系统会同时向卫星测试服务器申请转发遥测物理量和测试设备状态参数物理量。当采用TCP 协议时,测试服务器需要维持多个TCP 通信并频繁转发相同的数据内容。而采用UDP 组播时,仅需组播至相应地址端口,各终端监听相应地址端口即可获取物理量数据,通信方式简单,减轻了测试服务器压力。
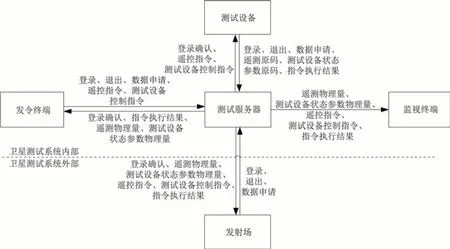
图1 卫星测试系统与发射场通信内容Fig.1 Content of communication between the satellite test system and the launch site
2 卫星发射主动段遥测接收系统
2.1 系统组成
如图2 所示,卫星发射主动段遥测接收系统部署在卫星发射阵地前方,并与后方卫星电测试厂房建立通信,由测控基带、变频器、低噪声放大器、地面测控天线、天线支架、天线伺服机构、光纤收发器、射频电缆和射频转接头等射频附件组成。图中,KVM 为Keyboard Video Mouse 的缩写,UPS 为Uninterruptible Power Supply 的缩写。
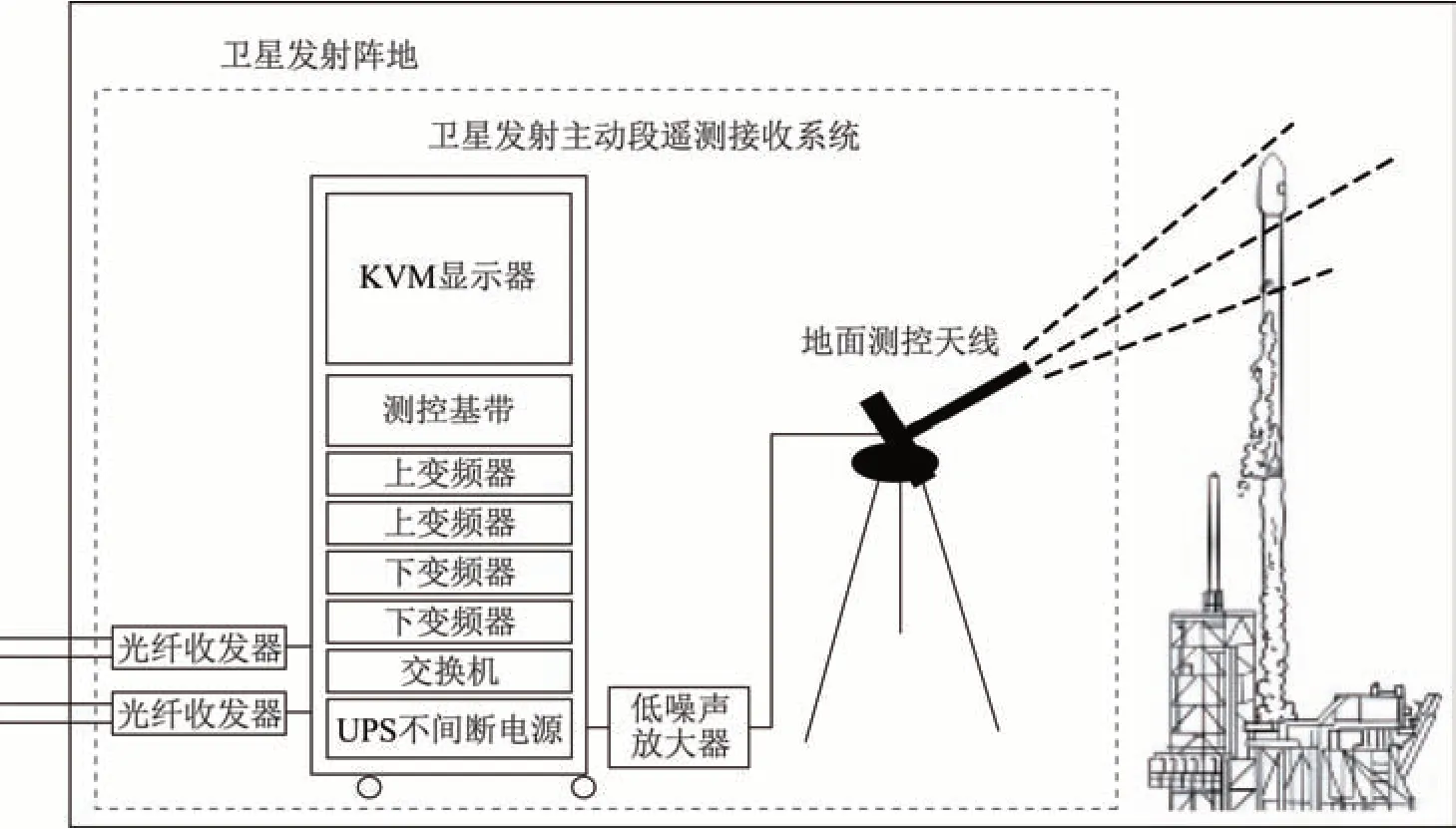
图2 卫星发射主动段遥测接收系统Fig.2 Schematic diagram of the telemetry receiving system in the active section of satellite launch
卫星发射主动段遥测接收系统中各组成部分的作用如下。
1)地面测控天线:用于接收卫星发射的带有卫星遥测信息的射频信号。
2)天线伺服机构:完成卫星主动段飞行时地面测控天线对卫星的指向跟踪。
3)低噪声放大器:放大地面测控天线接收到的带有卫星遥测信息的射频信号,并将其放大后的射频信号输出到变频器。
4)变频器:用于将低噪声放大器放大后的带有卫星遥测信息的射频信号进行下变频,使其射频信号能够适应测控基带。
5)测控基带:调制、解调变频器的带有卫星遥测信息的射频信号,形成卫星遥测数据原码,并将其通过光纤收发器,以光纤的形式传输至信息化机柜上的服务器进行遥测数据原码解析。
6)光纤收发器:用于遥测接收系统与卫星电测试厂房之间的数据传输。
2.2 系统工作原理
卫星发射主动段遥测接收系统工作原理如图3所示。
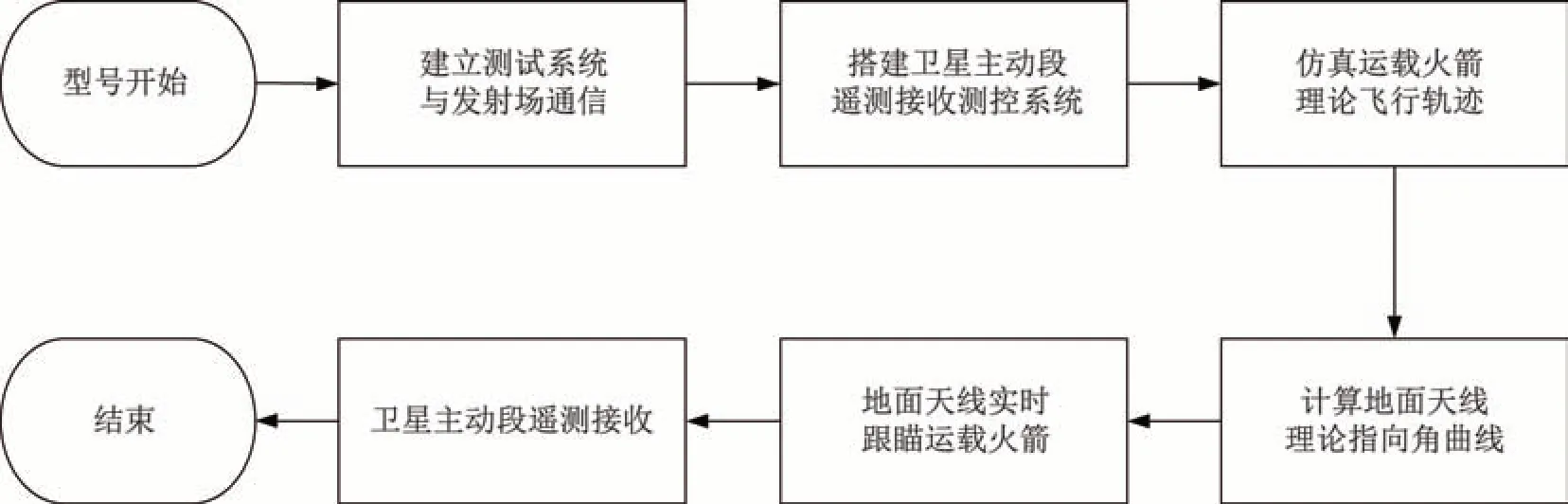
图3 卫星发射主动段遥测接收系统工作流程Fig.3 Flow chart of the telemetry receiving system in the active section of satellite launch
1)建立卫星测试系统与发射场之间的通信,优先采用TCP 协议,当需要与多个监视终端或测试设备进行通信时建议采用UDP 协议。
2)搭建卫星发射主动段遥测接收系统,主要包括测控基带、变频器、低噪声放大器、地面测控天线、天线支架、天线伺服机构、光纤收发器、射频电缆和射频转接头等射频附件等。
3)结合运载火箭及卫星的相关参数进行运载火箭理论飞行轨迹仿真计算。
4)根据搭建的遥测数据接收系统与发射塔架、运载火箭相对位置关系,以及运载火箭仿真理论飞行轨迹,计算地面天线理论指向角曲线。
5)地面测控天线伺服机构实时跟踪地面天线指向角曲线,实现卫星发射主动段地面测控天线对卫星的跟瞄,完成卫星主动段遥测数据接收。
3 基于PID 的地面测控天线波束指向算法
地面测控天线波束指向算法,用于计算卫星发射主动段飞行过程中地面测控天线波束对卫星的实时指向,从而维持稳定的测控传输链路,实现卫星发射主动段遥测数据的实时下传,算法的准确性对卫星发射主动段遥测信号的传输起着决定性的作用。
3.1 算法设计
卫星发射主动段遥测接收系统与发射塔架、运载火箭的位置关系如图4 所示。
图中:坐标系O1X1Y1Z1是以卫星发射主动段遥测接收系统为原点建立的遥测接收系统坐标系;坐标系O2X2Y2Z2为发射惯性坐标系;r为遥测接收系统坐标系O1X1Y1Z1下的运载火箭理论飞行轨迹;r1为发射惯性坐标系原点O2相对于遥测接收系统坐标系原点O1的相对距离;r2为发射惯性坐标系O2X2Y2Z2下的运载火箭理论飞行轨迹。
根据运载火箭飞行参数、卫星运行轨道参数、卫星入轨点位置、卫星入轨点速度等信息,并结合航天飞行动力学与航天飞行运动学专业知识,对发射惯性坐标系O2X2Y2Z2下的运载火箭理论飞行轨迹r2(t)∈R3进行仿真计算,发射惯性坐标系下的运载火箭理论飞行轨迹r2(t)的具体形式如下:
式中:r2(t)为第t飞行时刻运载火箭相对于发射惯性坐标系原点O2的空间位置坐标。
结合发射惯性坐标系下的运载火箭理论飞行轨迹r2(t),以及发射惯性坐标系原点O2相对于遥测接收系统坐标系原点O1的相对距离r1,可计算得到地面测控天线理论指向角曲线θr(t),其具体形式如下:
式中:αr(t) 为地面天线理论指向方位角曲线;βr(t)为地面天线理论指向俯仰角曲线,其具体形式为
式中:r(t)=[Xt Yt Zt]T为遥测接收系统坐标系O1X1Y1Z1下的运载火箭理论飞行轨迹;dt为运载火箭第t飞行时刻在O1X1Y1平面内的投影距离遥测接收系统坐标系原点O1的距离;Xt、Yt、Zt分别为运载火箭第t飞行时刻相对于遥测接收系统坐标系O1X1Y1Z1的空间位置坐标,其具体表达形式如下:
式中:r1=[ΔxΔyΔz]T为发射惯性坐标系原点O2相对于遥测接收系统原点O1的相对距离;r2(t)=[xt yt zt]T为发射惯性坐标系下的运载火箭理论飞行轨迹。
采用经典PID 控制器[22-25],实现地面天线指向角跟踪,完成卫星发射主动段地面测控天线对卫星的跟瞄,实现卫星主动段遥测数据接收,其控制器形式如下:
式中:θe(t)为地面天线指向角跟踪误差;θ(t)为地面天线实时指向角;θr(t)为地面天线理论指向角;kp为控制器比例项系数;ki为控制器积分项系数;kd为控制器微分项系数。
3.2 算法仿真
下面对基于PID 的地面测控天线波束指向算法进行仿真计算,仿真参数选取如下。
1)发射点经纬度:111.73°E,38.80°N。
2)接收系统经纬度:111.72°E,38.80°N。
3)发射时刻:2022-04-15,18:16:00 UTC。
4)星箭分离时刻:2022-04-15,18:37:23 UTC。
5)地面测控天线有效接收距离:600 km。
6)卫星初始轨道参数见表1。
7)地面测控天线PID 控制器参数见表2。

表2 地面测控天线PID 控制器参数Tab.2 Parameters of the PID controller of ground measurement and control antenna
火箭理论弹道如图5 所示,天线理论角曲线和目标距离曲线如图6 和图7 所示。地面测控天线的俯仰角、方位角跟踪响应曲线如图8 和图9 所示,跟踪误差角曲线如图10 所示。可以看到,地面测控天线俯仰角和方位角的最大跟踪角误差均在0.6°以内,且跟踪角误差能在30 s 内均减小到0.2°以内,并最终收敛到0,实现地面测控天线指向的稳定跟踪,满足地面测控天线主动段遥测接收要求。

图5 火箭理论弹道Fig.5 Theoretical trajectory curve of launch vehicle

图6 天线理论角曲线Fig.6 Curve of the antenna theoretical angle
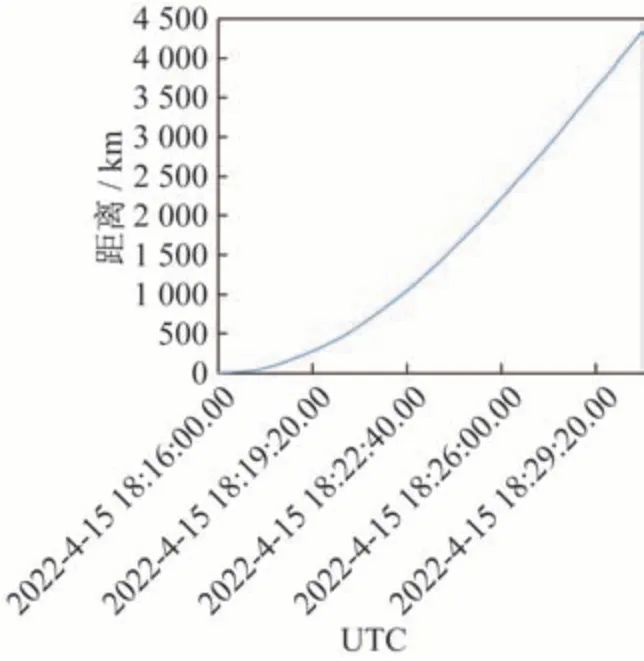
图7 目标距离曲线Fig.7 Curve of the target distance
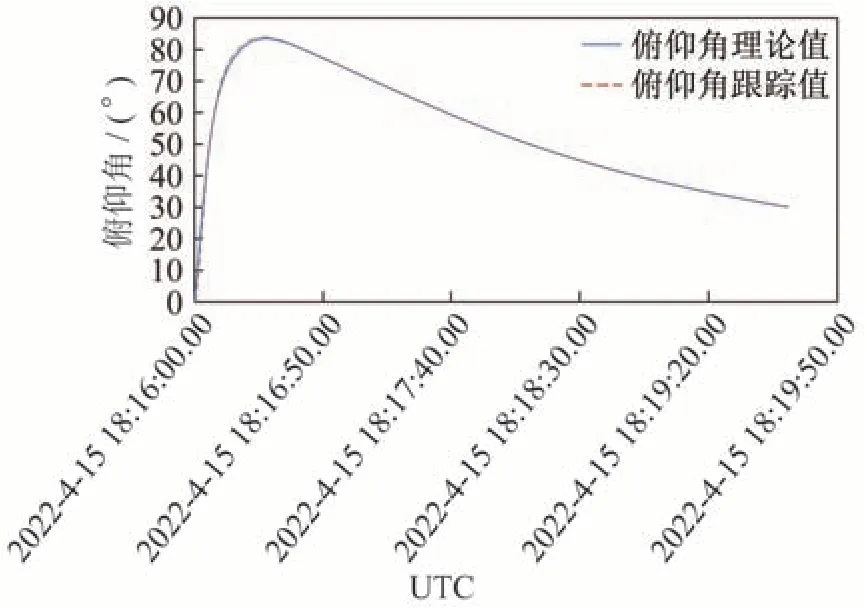
图8 天线俯仰角跟踪曲线Fig.8 Tracking curve of the antenna pitch angle

图9 天线方位角跟踪曲线Fig.9 Tracking curve of the antenna azimuth angle
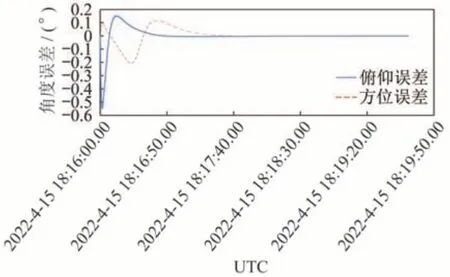
图10 天线俯仰角和方位角跟踪误差角曲线Fig.10 Tracking error curves of the antenna pitch angle and azimuth angle
4 试验验证及分析
本文设计的卫星发射主动段遥测接收系统在大气环境监测卫星发射任务中进行了飞行验证,成功接收卫星发射起飞至第一测控站间的遥测数据,实现了卫星发射主动段遥测的全时段完整接收。
卫星发射主动段遥测接收系统接收卫星遥测信号的质量通过卫星下传的关键遥测来表征,如虚拟信道帧计数、应答机1 AGC 和应答机2 AGC 等。下面对上述大气环境监测卫星发射任务中接收到的卫星发射主动段关键遥测,以及西安卫星测控中心第一测控站接收到的卫星发射主动段关键遥测进行分析,结果如图11 和图12 所示。
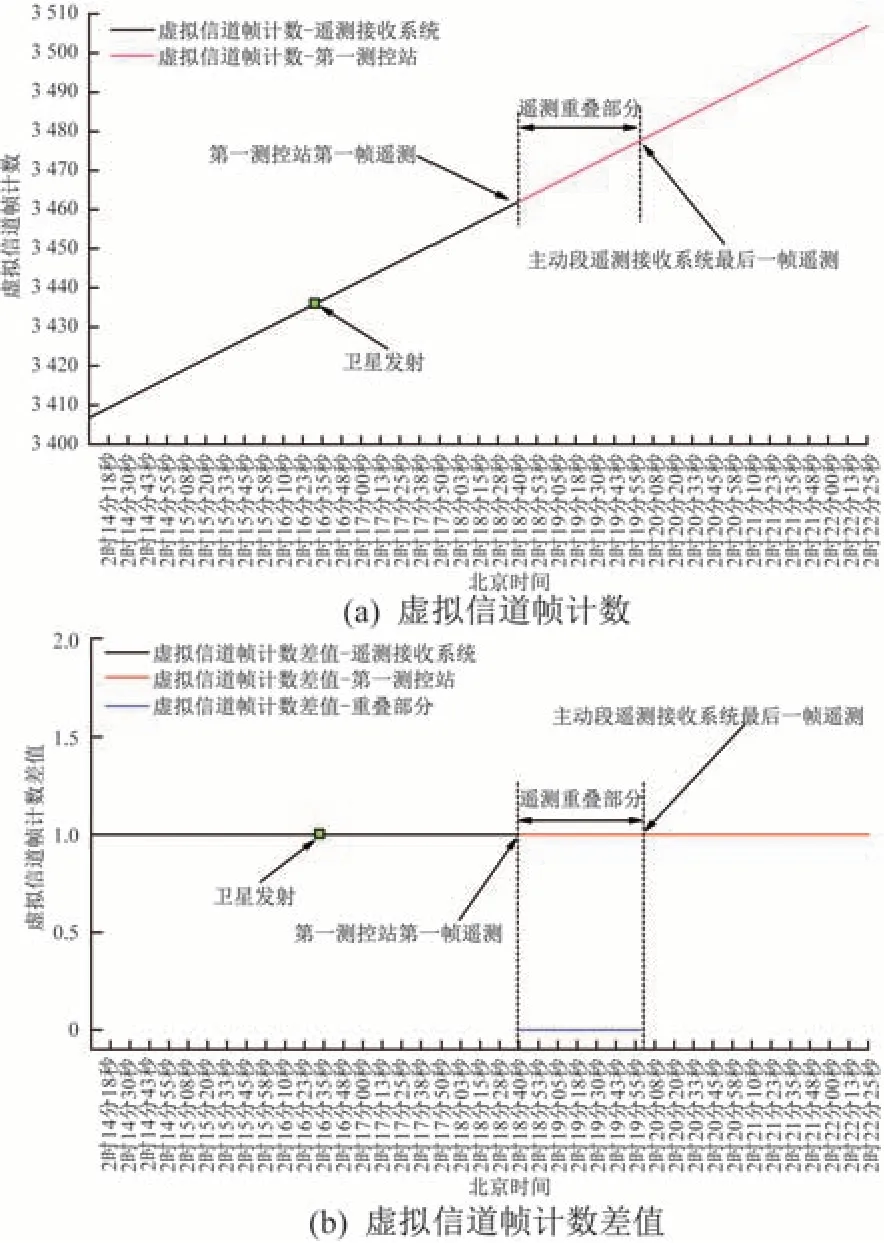
图11 虚拟信道帧计数与虚拟信道帧计数差值曲线Fig.11 Curves of the virtual channel frame count and virtual channel frame count difference

图12 应答机1 AGC 与应答机2 AGC 曲线Fig.12 AGC curves of Transponder 1 and Transponder 2
由图可知,卫星发射主动段遥测接收系统自卫星发射起飞前就能够稳定接收卫星遥测信息,直至西安卫星测控中心第一测控站能够稳定收到遥测信息后才被关闭。对于此次发射任务,卫星发射时刻为2 h 16 min,西安卫星测控中心第一测控站接收到的第一帧遥测的时刻为2 h 18 min 41 s。因此,卫星发射主动段存在近3 min 的遥测盲区。而卫星发射主动段遥测接收系统关闭前接收到的最后一帧遥测的时刻为2 h 19 min 59 s,由此可知,主动段遥测接收系统接收的卫星遥测除了能够完整覆盖发射主动段遥测盲区外,与第一测控站接收的遥测信息之间存在78 s 的重叠部分。
由图11 和图12 可知,卫星发射主动段遥测接收系统与西安卫星测控中心第一测控站接收的遥测信息中虚拟信道帧计数均连续稳定递增,且虚拟信道帧计数前后两帧差值均为1。遥测重叠部分虚拟信道帧计数差值为0,表明卫星发射主动段遥测接收系统与西安卫星测控中心第一测控站接收的遥测信息具有良好的一致性,进而说明卫星发射主动段遥测接收系统接收的遥测信息具有较好的可信度。另外,主动段遥测接收系统与第一测控站接收的遥测信息中应答机1 和应答机2 的AGC 均处于0.9~1.1,遥测信号稳定。
上述分析表明,卫星发射主动段遥测接收系统工作状态良好,且接收到的卫星遥测数据不丢帧、无误码,具有较好的连续性和可信度。
5 结束语
为解决卫星发射主动段存在遥测盲区问题,本文设计了一种基于PID 的卫星发射主动段遥测接收系统,充分利用现有的地面测控设备,简化系统构成,实现卫星发射主动段遥测数据的实时接收与监测,保证卫星发射主动段遥测数据的连续性和完整性,且具有较好的可信度。
猜你喜欢
中国新通信(2022年9期)2022-06-10 02:31:54
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
环球时报(2019-09-23)2019-09-23 06:15:25
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
传媒评论(2017年8期)2017-11-08 01:47:36
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
河南科技(2014年16期)2014-02-27 14:13:30
决策与信息(2012年2期)2012-09-20 03:00:50
温州职业技术学院学报(2011年2期)2011-01-13 04:33:52
