
大气激光雷达热控设计与验证
2023-07-17 03:12杜嘉旻徐文杰桂利佳周砚耕袁佳晶
上海航天 2023年3期
杜嘉旻,徐文杰,陈 菡,桂利佳,周砚耕,万 渊,袁佳晶
(1.上海卫星工程研究所,上海 201109;2.上海光学精密机械研究所,上海 201800;3.上海卫星装备研究所,上海 200240)
0 引言
全球首颗搭载主动激光雷达载荷的大气环境监测卫星成功发射,通过主、被动手段结合实现对大气细颗粒物、污染气体、温室气体、云和气溶胶等进行大范围、连续、动态、全天时的综合监测[1]。
激光雷达是一个大型光学载荷,能同步探测全球气溶胶垂直廓线信息、CO2柱线浓度等重要大气环境要素[2]。光学载荷是对高精度热控制需求最高的航天器之一[3-4],而高精度的热稳定性和热均匀性也是保持光学载荷高稳定性的重要途径[5]。
激光雷达包含多个组部件,其中接收望远镜组件、激光器、接收光学单机等关键组部件的温度水平,温度波动及温度梯度对雷达的正常工作及测量精度有重要影响。因此,载荷方对热控提出了高精度的温度指标,例如:接收望远镜主镜温度水平(20±1)℃,温度波动≤±0.5 ℃,温度梯度≤0.5 ℃。
文献[6]提出对大型望远镜直接采用闭环控制主动加热回路的方式控制望远镜温度,由于激光雷达上的望远镜对温度梯度提出了优于0.5 ℃的要求,而直接对望远镜加热会造成镜面局部温度过高,因此该方案对激光雷达接收望远镜控温不适用。
文献[7]提出通过风冷式的冷却板对地基大口径望远镜主镜进行温度控制,由于激光雷达为空间光学载荷,所处环境无空气对流,因此该方案对激光雷达接收望远镜组件控温不适用。
文献[8]提出国外多种空间激光器热设计的典型案例,但这些方案的热设计重点在于排散激光器的废热,对于大气激光雷达的激光器,不仅对散热提出了要求,同时对激光器的温度稳定性和均匀性提出了要求,因此这些方案对激光雷达激光器控温不适用。
文献[9]提出采用优化激光器的壳体结构的方式来优化散热性能,但该方案也注重散热,无法满足温度稳定性,同时大气激光雷达的布局结构不适用于通过优化激光器外形结构来依靠本体散热。
文献[10]提出通过加热器和导热铜带控制2 个通道CCD 温度。激光雷达的接收光学单机内有8 个探测器和1 个CCD 模块需要控温,且对接收光学单机底板有温度波动和梯度要求,因此该方案对激光雷达接收光学单机控温不适用。
由于激光雷达构型复杂,部件多且热控指标的各自差异,本文针对激光雷达多个组部件的温控要求,对各个组部件分别提出合理的热控设计方案,通过散热设计、隔热设计,并结合主动温控措施抑制温度波动,使激光雷达各个部件的温度波动尽可能降低,各个部件的温度尽可能均匀。
激光雷达经过了仿真计算,热平衡试验验证,并通过了在轨测试,各项在轨飞行温度数据均能满足要求。目前激光雷达在轨工作状态良好,证明了热控设计的正确性[11]。
1 热控设计任务分析
1.1 结构组成
大气激光雷达(Aerosol and Carbon Dioxide Detection Lidar,ACDL)由遮光罩、接收部分、发射部分、激光器、接收光学单机、双频参考机等部分组成。具体组成如图1 所示。
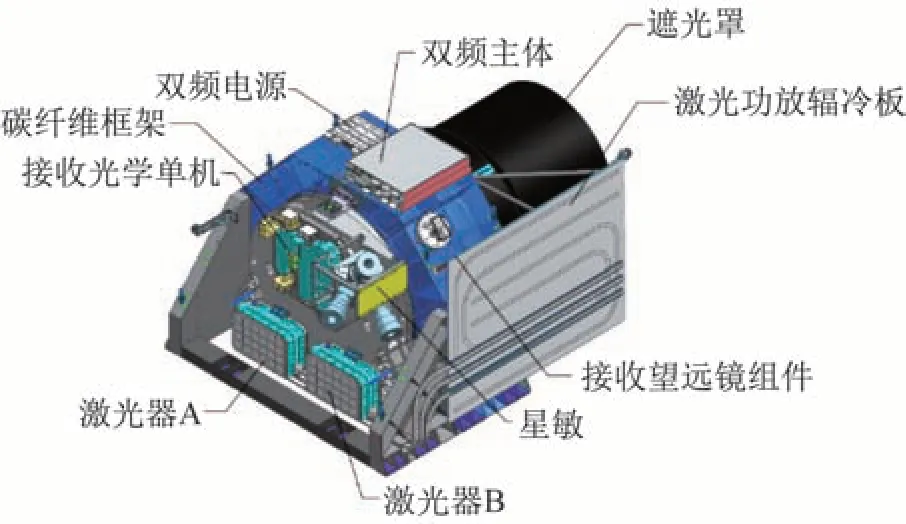
图1 大气激光雷达光机头部组成Fig.1 Composition of the ACDL optical machine head
1.2 温度指标
为满足激光雷达在轨工作的各项性能,接收望远镜、激光器、接收光学单机等部件需要控制在合适的温度范围内,同时为了满足高精度的探测需求,提出了温度波动和梯度的指标。各主要部件的探测、定标模式温度指标范围见表1。

表1 主要部件温度指标要求Tab.1 Requirements of the temperature indicators of the major devices
1.3 工作热耗
光机头部内部热耗主要集中在接收光学单机、激光器等部件上,主要部件热耗列见表2。
2 热设计方案
2.1 热控设计概述
激光雷达热控难点主要为有控温要求的组件多达8 个,而每个组件内又包含多个子部件,其每个组件、部件的温控要求、有源或无源、外热流受照情况都不尽相同,因此各个组部件尽可能独立温控,对于它们之间的隔热或者热耦合,以及各自散热面和热控实施区域的选取提出高要求,各个部件的散热视场选取既要尽量规避外热流的波动,又要做到尽可能彼此独立,互不影响。
基于以上难点对激光雷达进行热控设计,选取3 个典型组部件:接收望远镜组件、激光器、接收光学单机的热控方案进行概述。
1)接收望远镜热控方案。激光雷达为目前国内口径最大的激光遥感载荷,接收望远镜控温精度要求高,其大口径的特点造成望远镜的温度波动和梯度控制难度很大。
对接收望远镜主镜的控温方案采取控制主镜背板的温度,由于望远镜口径大,因此对主镜背板通过加热器进行周向分区控制,通过主镜背板对主镜的辐射达到控制主镜温度的效果。
对接收望远镜次镜的控温方案主要是控制次镜支撑件的温度波动和梯度,减少支撑件的热变形,使次镜和主镜之间的相对位置变化在一定范围内。次镜支撑件包含了次镜支撑筒和次镜三杆两部分。由于次镜支撑件的材料为SiC/C,导热性能较差,对于支撑筒采用沿周向及轴向分区域控温的方法,对于次镜三杆采用沿杆的头部和尾部分区域控温的方法。
对接收望远镜组件增加遮光罩,外表面的多层均采用含碳聚酰亚胺的黑膜,并将雷达整体向+Y方向旋转2°,减少杂散光对接收望远镜组件温度波动的影响。
2)激光器热控方案。激光器为激光雷达的核心部件,合理的散热通道对激光器至关重要[12]。激光器的热控难点,第1 为高功率热源集中在局部几个区域,4 个放大器的热耗分布为30、42、85、77 W集中在60 mm×80 mm 的区域内;第2 为激光器结构复杂,底部温度控制要求高,温度波动<1 ℃,梯度<1 ℃。
热管为激光器散热系统中的优选传热方式[13],让高热耗区域与热管充分接触,由热管将激光器的热量传递给受外热流影响较小的+Y散热板向冷空间排散。通过先行的地面试验,验证导热硅脂、铟箔等多种导热填料在热管和放大器底部的导热效果,根据不同的热阻调整热管和散热面的尺寸,从而达到控制激光器温度波动和梯度的效果。
3)接收光学单机热控方案。接收光学单机的特点为其发热部件为8 个探测器及1 个视轴CCD,且布局位置分散。同时接收光学单机底板构型复杂。底板有大量的减轻槽和加强筋,底板整体温度波动指标为1 ℃,梯度为2 ℃。
接收光学单机热控设计方案为布置一根9.1 mm×40 mm 的热管向+Y方向散热板传递热量,热管通过导热片连接各个热源。先行投产热管整定工装,保证了热管的高精度加工需求,与每个导热片充分接触。对每个导热片进行单独的热阻分析和设计,同时满足散热需求和高精度安装需求。
除了以上的主、被动热控措施,还需要高可靠控温策略。通过精密控温仪对激光雷达的各个部件进行精准控温,并对加热器功率进行合理分配。影响功率分配主要有以下3 个方面:
1)激光雷达多种工作模式。雷达在轨主要经历5 种工作模式:待机模式、探测模式、定标模式、在轨存储模式和加热去污模式。各个模式的控温目标和雷达自身功耗均不相同。
2)激光雷达经历多种热环境。雷达从地面塔架到在轨工作到设想的不同在轨故障预案,雷达会经历多种不同的热环境,同时在不同的热环境下,卫星所能提供给雷达热控的加热功率也差别极大。
3)激光雷达控温仪的软硬件限制。雷达控温仪共有7 个10 W 和2 个40 W 控温模块。激光雷达包含多个组部件,在多种工作模式下,加热器开启状态不尽相同。加热器的设计受到控温模块的峰值功率限制,以及遵循主、备份加热器设置在不同模块的可靠性设计思路。
根据以上3 方面,对激光雷达控温仪中的加热器功率分配经过多方反复迭代,设计了包含塔架模式、主动段模式、除气模式等共8 个控温阈值表,通过仿真和试验多次验证,确保产品安全、控温准确,能源节省。
2.2 热仿真分析
基于以上的热设计方案,综合考虑空间外热流、卫星本体及卫星太阳帆板等的影响,应用Thermal Desktop/Sinda Fluint 软件对激光雷达在轨温度水平进行了仿真分析计算[14-16]。并根据热控涂层寿命周期内的退化和在轨不同时期卫星对应的太阳同步轨道参数[17-19],对载荷头部热仿真模型进行了高、低温工况的设置,瞬态热仿真计算。由于雷达内部结构复杂,建模时对局部特征进行了必要的简化,最终划分了27 747 个网格,载荷头部有限元网格模型如图2 所示,雷达中典型组部件接收望远镜组件、激光器、接收光学单机的有限元网格模型分别如图3~图5 所示。

图2 雷达光机头部有限元网格模型Fig.2 Finite element mesh model of the ACDL optical machine head
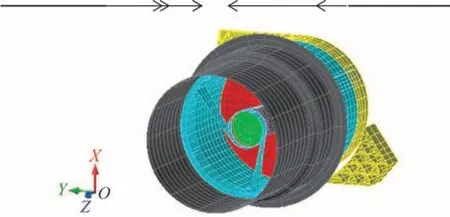
图3 接收望远镜组件有限元网格模型Fig.3 Finite element mesh model of the receiving telescope
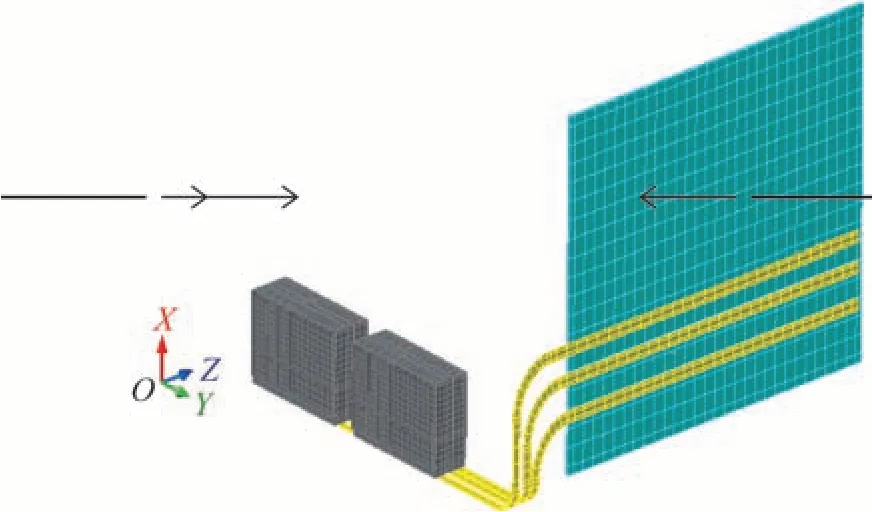
图4 激光器有限元网格模型Fig.4 Finite element mesh model of the laser
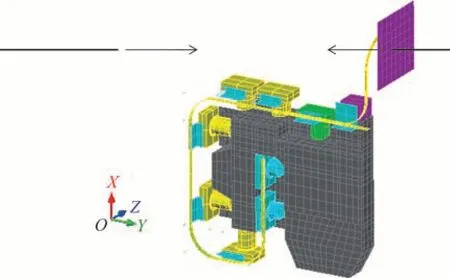
图5 接收光学单机有限元网格模型Fig.5 Finite element mesh model of the receiving optical equipment
各个部件在探测模式高、低温工况下的计算结果见表3。分析计算结果可知:接收望远镜主镜在高、低温工况下温度均在指标范围内。主镜的波动为0.4 ℃、梯度0.3 ℃能满足高精度的探测需求。激光器、接收光学单机在高温工况寿命末期仍在20 ℃以内。同时通过加热器控温,激光器、接收光学单机的温度波动和梯度始终处于指标范围内,保障了激光器、接收光学单机的工作效率。
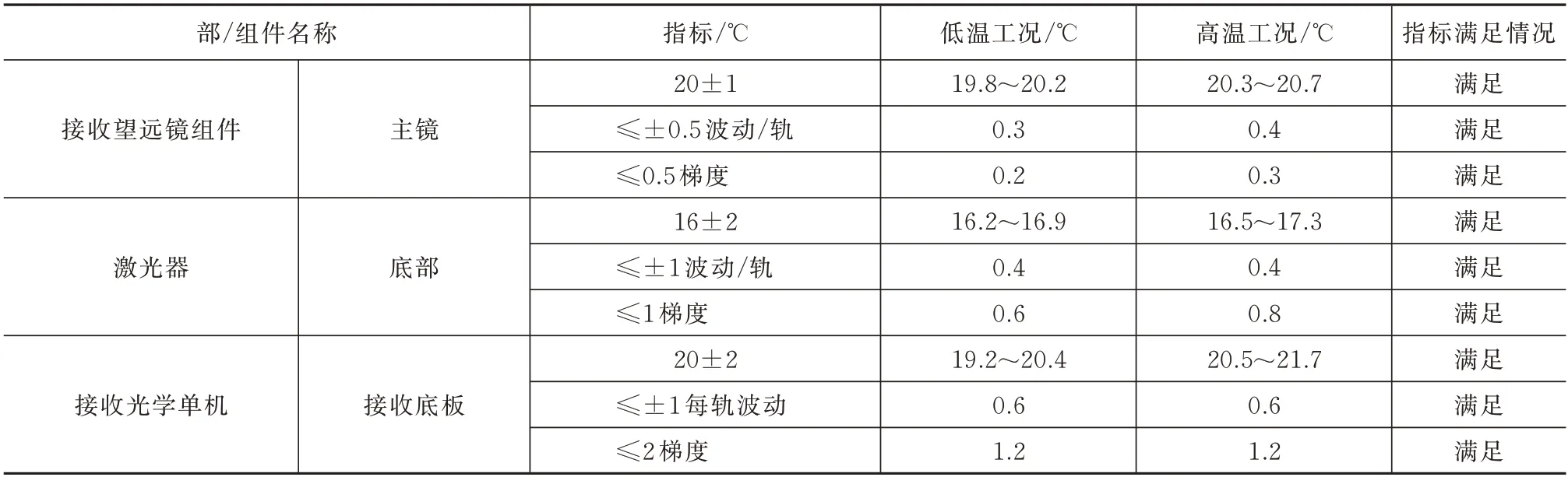
表3 探测模式高温工况和低温工况仿真计算结果Tab.3 Simulation results under high and low temperature conditions in the detection mode
3 热试验及在轨验证
为验证热设计的合理性和有效性,考核载荷热控系统的工作能力,热平衡试验是一种有效的手段[20-21]。载荷光机头部在初样阶段完成了热平衡试验,试验采用红外灯阵和电加热器相结合的方式模拟各个散热面的外热流[22],并用电加热器模拟卫星温度边界条件[23-25]。试验结果表明,在各典型工况下光机头部内部组件的温度均能满足指标要求。在轨温度曲线如图6~图8 所示。
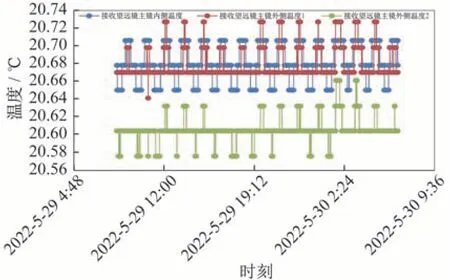
图6 主镜在轨温度变化曲线Fig.6 Temperature curve of the primary mirror in orbit
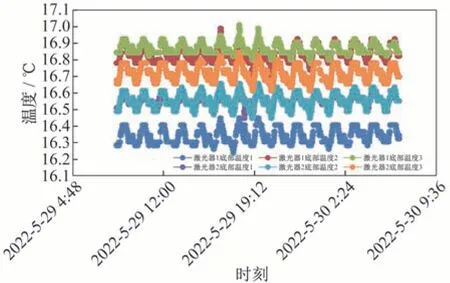
图7 激光器底部在轨温度变化曲线Fig.7 Temperature curve of the laser bottom in orbit
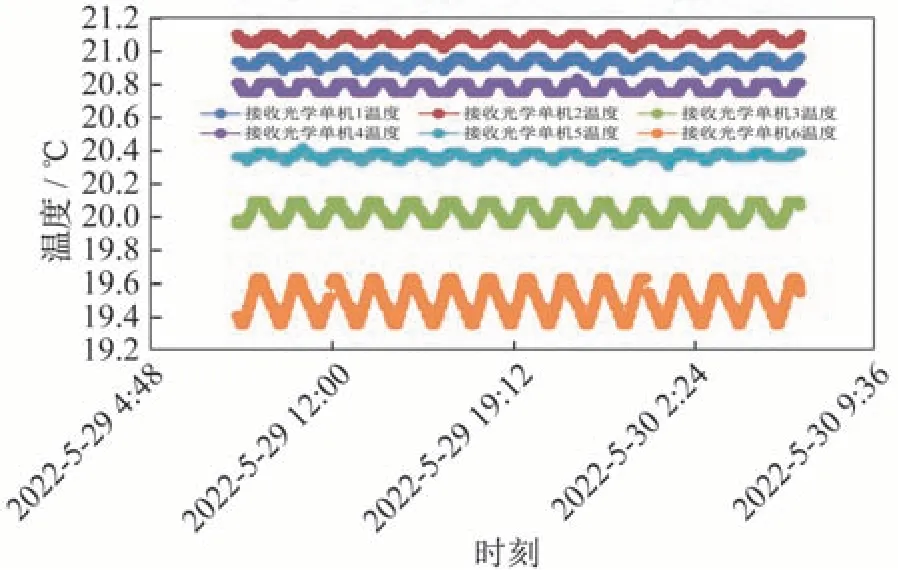
图8 接收光学单机在轨温度变化曲线Fig.8 Temperature curve of the receiving optical equipment in orbit
热平衡试验主要数据结果与2022 年5 月底的在轨温度遥测结果见表4。对比发现,热平衡试验的低温工况与高温工况温度范围能包络在轨温度。热控设计合理可行,热控产品工作正常。
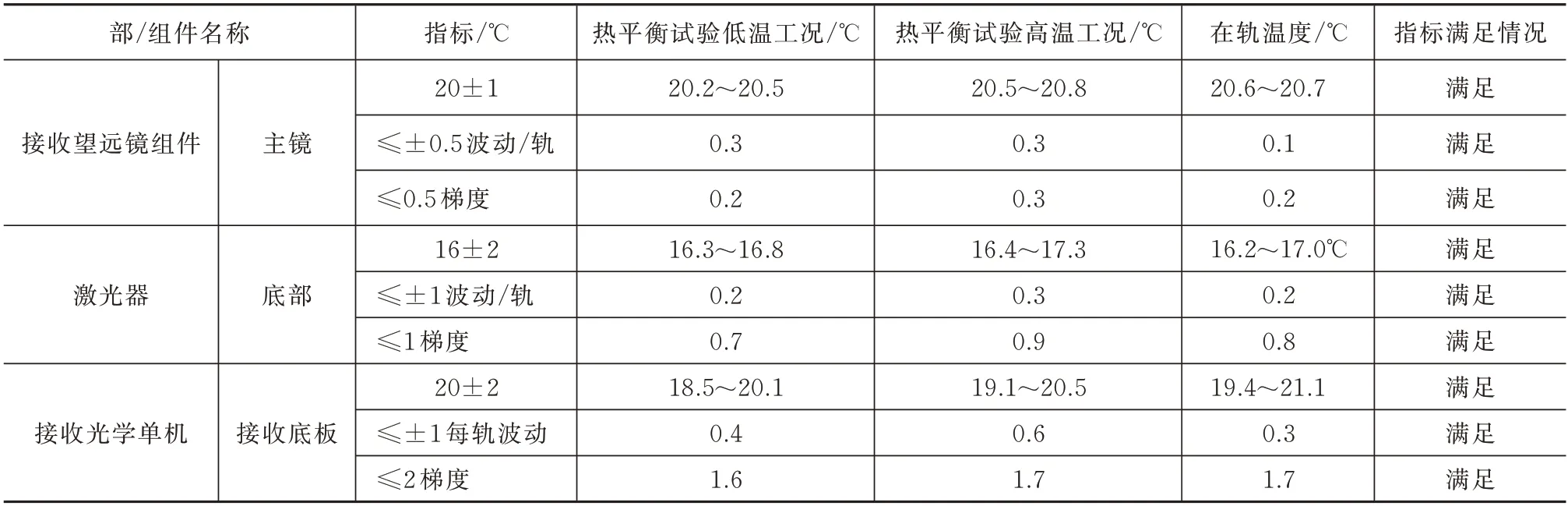
表4 探测模式热平衡试验和在轨飞行温度数据Tab.4 Temperature data of the thermal balance tests and in-orbit flight in the detection mode
4 结束语
本文根据大气激光雷达的热控需求,详细分析了热控设计的重点与难点,并针对各部分的具体要求合理地设计散热方案,对接收望远镜组件、激光器、接收光学单机等主要部件进行精细化的控温设计,同时辅助以光学载荷常用的被动热控措施,形成了激光雷达的热控设计方案。热平衡试验结果和在轨飞行温度数据表明,热控设计合理可行,热控措施能够很好地满足激光雷达工作时所需的温度要求。
猜你喜欢
云南化工(2021年8期)2021-12-21
新疆钢铁(2021年1期)2021-10-14
装备制造技术(2020年2期)2020-12-14
航天工业管理(2019年11期)2019-04-20
电站辅机(2017年3期)2018-01-31
能源(2017年9期)2017-10-18
中国光学(2017年4期)2017-08-01
光学精密工程(2016年11期)2016-12-19
时代农机(2016年6期)2016-12-01
激光与红外(2014年8期)2014-03-20
