
机器人胰十二指肠切除术的新助手教学与实践
2023-07-17 01:25尹注增张柯迪周志鹏柳俨哲张修平林昭屹高元兴
腹腔镜外科杂志 2023年6期
尹注增,万 涛,张柯迪,周志鹏,柳俨哲,张修平,林昭屹,高元兴
(解放军总医院第一医学中心肝胆胰外科医学部,北京,100853)
达芬奇机器人手术系统由医生控制台、床旁机械臂系统、成像系统组成。自2003年Giulianotti等报道第1例机器人胰十二指肠切除术(robotic pancreaticoduodenectomy,RPD)以来,研究证明[1-4],RPD安全可行,R0切除率等优于开腹手术;与腹腔镜手术相比,RPD能降低中转开腹率、术后出血率,减少术中出血量,缩短术后住院时间。机器人手术的医生控制台远离手术平台,许多辅助操作需要床旁助手完成。理论上而言,RPD的效果不仅取决于术者经验,也与床旁助手的经验、技能有关。目前关于RPD的研究主要集中在手术安全性、可行性、围术期结果及术者的学习曲线、培训方面[5-7]。对于无机器人手术经验的新床旁助手(新助手)的培训及其对RPD手术结局的影响很少有研究报道。笔者所在中心已完成2 000余例RPD,教学研究方面建立了Trocar孔模式化布局并对助手经验进行了总结[8-10]。在此基础上,本研究设计了针对RPD新助手的标准流程化教学并回顾分析其对手术结果的影响。
1 资料与方法
1.1 临床资料 回顾分析2021年10月至2022年10月本中心两个胰腺专业组连续完成的RPD的临床资料。本研究中RPD均由新助手协助完成,两名术者不仅有开腹或腹腔镜胰十二指肠切除术的经验而且经过培训,均为有教师指导的第二或第三代RPD医生[6],各自独立完成了50例以上机器人胰腺手术。研究入组流程见图1。研究以新助手参与RPD的手术时间顺序分为前后两个半段。

图1 研究设计流程图
1.2 新助手教学培训方法 新助手经达芬奇机器人手术培训中心的初级培训后,首先通过术者或有RPD经验的助手结合对手术的理解与经验进行技术讲解、带教、观摩及复盘手术视频的方法掌握基本要领并熟悉关键操作,然后开始参与手术。标准化教学流程分为以下6个关键步骤:(1)Trocar孔建立:以da Vinci Si手术系统为例,本研究中的Trocar孔建立流程包括:①RPD观察孔位置相对恒定,并与体表投影差异不大,因此常规建立观察孔。完成后首先全面探查,重点观察腹腔内脏器,主要观察右肝下缘、结肠肝曲的实际位置及与体表投影的关系,按模式化布孔的原则确定3号、2号机械臂的体表布孔位置。②1号机械臂的位置(主操作孔)严重影响切除与吻合操作的顺利进行,因此最关键。主操作孔的体表位置需以胃大弯侧与横结肠的高度来判定操作孔与脐水平线的高低,以患者的腹型来判定与脐的距离,腹型肥胖者可将主操作孔适当向内移,瘦小者可将主操作孔向外移[5]。③助手孔的位置除按模式化布孔外,需同时结合助手与患者的身高进行适当的上移或下移。Trocar布局示意图见图2。(2)体位:患者取头高脚低20°、左右水平或右侧稍高、分腿或截石位。体位需在Trocar孔完成、机器臂系统定位后,机械臂连接前进行调整。(3)机械臂的连接与脱离:新助手平时即应熟悉机械臂的关节与按钮,练习机械臂与Trocar的对接、脱离。此外,还应学会根据术中需要来整体调整主操作臂的高低及内外移动。(4)术中配合:关于机器人胰腺手术助手的术中配合及器械使用技巧可以参考文献[9]。RPD术中,助手主要利用吸引器合理适度地配合术者完成术野显露、冲洗与清除积液,稳定且熟练的血管夹闭,正确使用吻合器等一系列操作。(5)引流管的放置:引流对于RPD尤为重要,我们常规放置两根腹腔引流管,分别由3号、2号机械臂孔引出后同时撤除机械臂。第1根由助手先将无侧孔端送入,由术者放置于文氏孔后方;第2根则先将有侧孔端送入,放置在胰肠吻合口前方。引流管需妥善固定并保留15 cm的体外长度,避免引流管滑脱、减少细菌植入风险。(6)标本取出与切口关闭:原则上与腹腔镜、开腹手术相同。强调恶性肿瘤的标本取出应遵循无瘤原则,即保护取物袋的完整性与密闭性,避免切口种植转移。因Trocar孔为8 mm、12 mm,建议逐层缝合,避免发生Trocar孔疝。
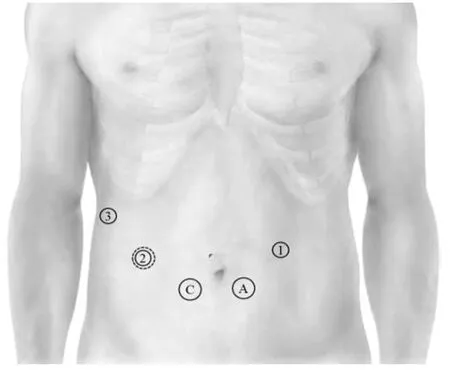
图2 Trocar孔布局示意图(A:助手孔,12 mm Trocar;C:镜头孔,12 mm Trocar;①1号机械臂孔,8 mm Trocar;②2号机械臂孔,8 mm Trocar在12 mm Trocar内;③3号机械臂孔,8 mm Trocar)
1.3 观察指标 统计前后半段新助手协助RPD的总手术时间(麻醉记录单的手术开始和结束时间)、镜下手术时间(即RPD的切除与吻合时间等),非镜下手术时间(主要包括布孔、机械臂连接、脱离及取标本时间等)、术中出血量、术后住院时间、并发症发生率等。并发症采用Clavien-Dindo分级,Ⅲ级及以上为严重并发症[11]。胰瘘诊断标准采用国际胰瘘研究小组制定的临床分级标准[12]。
1.4 统计学处理 采用SPSS 20.0软件进行数据分析。满足正态和方差齐性的计量资料以均数±标准差表示,组间比较采用独立样本t检验;不满足正态和方差齐性的计量资料以中位数(最小值,最大值)表示,组间比较采用非参数秩和检验。计数资料的比较采用Pearson卡方检验或Fisher确切概率法。P<0.05为差异有统计学意义。
2 结 果
经教学培训后,新助手连续参与的RPD共70例,最终入组48例,前后半段各24例。入组病例中,男28例,女20例,平均(58.85±10.76)岁,体重指数平均(22.78±2.60)kg/m2,肿瘤直径(2.60±1.61)cm,良性及交界性肿瘤12例,恶性肿瘤36例,诊断(前/后半段例数)为:十二指肠乳头腺瘤(1/2),十二指肠间质瘤(0/1),胰腺囊性肿瘤(4/4),十二指肠乳头癌(2/4),胰腺癌(7/4),胆管下段癌(8/9),壶腹癌(2/0)。两组患者基线资料差异无统计学意义,见表1。

表1 前后半段新助手参与RPD一般资料的比较

续表1
前后半段相比,新助手协助RPD的总手术时间(P=0.001)、镜下手术时间(P=0.007)、非镜下手术时间(P=0.004)差异有统计学意义。中位术中出血量(P=0.478)、中位术后住院时间(P=0.402)差异无统计学意义。在新助手协助的RPD中,均未发生C级胰瘘,无二次手术及介入栓塞止血,无Clavien-Dindo Ⅲb级以上并发症发生。前后半段相比,新助手协助RPD的总并发症发生率、各类并发症发生率差异均无统计学意义。见表2。

表2 前后半段新助手协助RPD的围术期结果

续表2
3 讨 论
随着越来越来的外科医师加入RPD的行列,RPD培训的研究越来越多[5,13-14]。Rice等[6]的研究表明,以熟练程度为基础的模拟培训加上教师指导,第三代手术医生首例RPD的手术时间与第一代手术医生(亲自探索)的第250例相当。但机器人手术需要一名熟练掌握床旁机械臂系统相关技术工作的助手,并提供腹腔镜下手术协助。因此助手操作的流畅、规范、相关技巧的熟练度均会影响手术进展,如何培训一名合格的新助手非常重要[15-16]。
本研究建立了6个关键步骤的标准流程化教学并辅以手术视频观摩、复盘的方式进行培训。对新助手的培训经验总结如下:(1)Trocar孔模式化布局是体内脏器理想化的体表投影,并不能准确反映脏器的实际位置。以模式化布局为基础、参考Giulianotti的经验[5],我们建立了镜头孔优先→以右肝下缘与结肠肝曲的高低定位3号、2号Trocar孔→以胃大弯与横结肠的高低、患者腹型定位主操作孔→由助手、患者身高调整助手孔的流程。(2)强调体位、机械臂调整顺序。(3)机器人手术的助手本质是一名腹腔镜手术助手。尽管机器人手术无需扶镜手与助手的缝合打结,但助手仍需强化腹腔镜手术的基本操作,获得熟练的肌肉记忆。(4)规范引流管的放置顺序及保留体外的长度。(5)强调标本取出的无瘤原则及Trocar孔的关闭。
本研究结果表明,与前半段相比,后半段新助手协助RPD的总体手术时间、镜下时间、非镜下时间均明显缩短。我们认为,非镜下时间的缩短是完全由新助手的经验决定的,而镜下时间、总手术时间可能受术者学习曲线的影响。关于RPD术者的学习曲线文献报道不一[17-18],有学者认为需要完成40例或80例。匹兹堡大学医学中心的经验[6]指出,有规范化培训及教师指导的第二、三代外科医生的RPD学习曲线会大大缩短。本研究中的术者均处于RPD学习曲线的平台期,因此我们推测新助手经验的增加不仅缩短了非镜下时间,也缩短了镜下时间与总手术时间。此外,Nayyar等[19]、Sasaki等[20]的研究表明,随着助手经验的增加,机器人泌尿外科手术的手术时间呈下降趋势。因此我们认为,新助手经过流程化的教学培训与实践后,随着经验的积累,RPD的手术时间会缩短。此外,本研究还发现,在前、后半段新助手协助RPD的术中出血量、术后住院时间、总并发症发生率等差异均无统计学意义。这也一定程度上说明,我们的流程化教学培训与实践,能保障新助手协助RPD的顺利完成及患者的安全。
综上所述,经过流程化规范培训的新助手协助RPD是安全、可行的。新助手经验的增加,有助于缩短RPD的手术时间。随着机器人手术系统的推广,建立完善的术者与助手的培训体系,对于机器人手术团队的成长尤其是保障手术与患者的安全具有重要的意义。
猜你喜欢
昆钢科技(2021年4期)2021-11-06
介入放射学杂志(2021年5期)2021-05-20
心电与循环(2021年1期)2021-02-05
中华养生保健(2020年5期)2020-11-16
劳动保护(2018年5期)2018-06-05
阅读与作文(小学低年级版)(2016年3期)2016-03-08
少儿科学周刊·儿童版(2015年2期)2015-07-07
少儿科学周刊·儿童版(2015年2期)2015-07-07
山东第一医科大学(山东省医学科学院)学报(2015年3期)2015-06-07
介入放射学杂志(2015年7期)2015-01-16
